1. Aperçu du projet
1.1 Contexte du client
Le client commercialise un casque de sécurité intelligent pour l'industrie, destiné aux secteurs de la construction, des mines, du pétrole et du gaz, ainsi que de l'industrie lourde. L'entreprise possédait les certifications EPI passifs et un solide réseau de distributeurs sur trois continents. Le problème ? Ses concurrents proposaient des casques connectés, et elle n'avait aucune solution de rechange. La mission consistait à transformer une coque de casque certifiée en un objet connecté (IoT), sans perdre les certifications EN 397 et ANSI Z89.1.
A lire également: Étude de cas sur une tablette d'apprentissage intelligente pour la petite enfance
1.2 Objectifs du projet
Nous nous sommes concentrés sur les six livrables dès le premier jour.
- Suivi GPS en temps réel
- Détection automatique des chutes avec alerte
- Détection environnementale de la température, avec détection de gaz en option
- Une autonomie minimale de douze heures
- Étanchéité IP65 ou IP67
- Une conception matérielle adaptable du prototype à la production de masse sans refonte complète.
Chaque décision d'ingénierie prise en aval répondait à ces six exigences.
2. Défis de l'industrie dans le développement des casques intelligents
2.1 Environnements industriels difficiles
Sur les chantiers, les engins de chantier lourds génèrent des vibrations constantes. Dans les mines, l'humidité est élevée et les poussières fines omniprésentes. Sur les plateformes offshore, les embruns salés et les chocs dus aux chutes d'équipement ajoutent à cela. Concevoir un système de capteurs fonctionnel en laboratoire est une chose. Maintenir son étalonnage après une chute de deux mètres sur du béton, avec des connecteurs obstrués par la poussière, en est une autre.
2.2 Positionnement intérieur et extérieur
Le signal GPS est interrompu à l'intérieur des bâtiments à ossature métallique, des passages souterrains et des sols denses des entrepôts. Un ouvrier entrant dans un tunnel disparaît de la carte de suivi dès que le signal satellite est perdu. Le projet nécessitait une approche hybride.
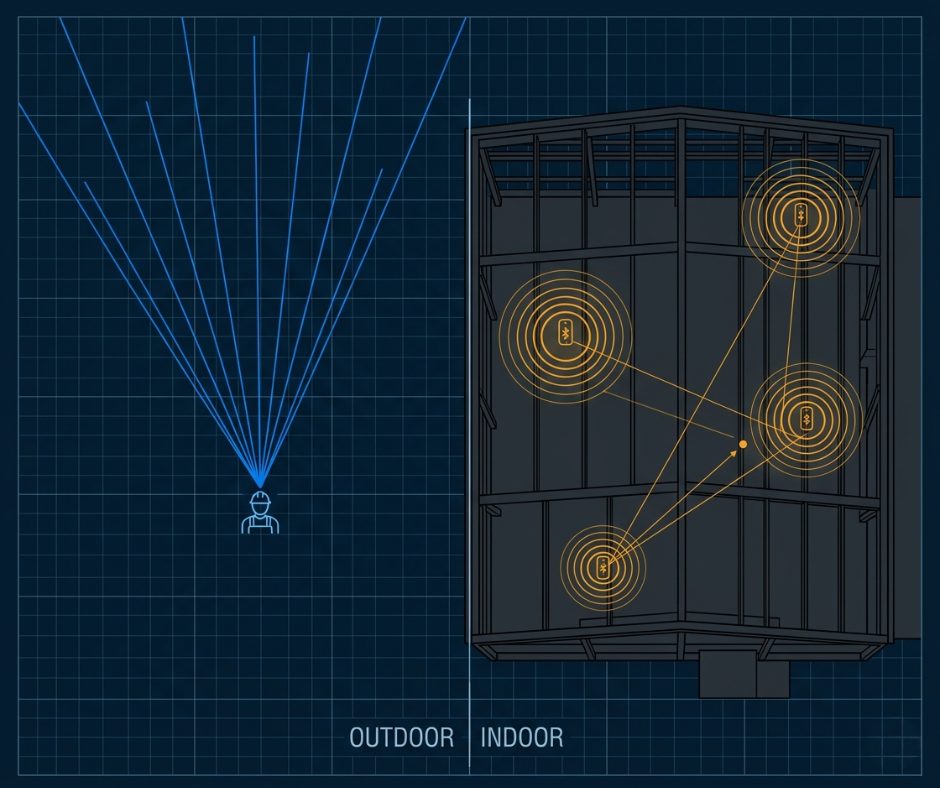
En extérieur, le GPS offre une précision de cinq à dix mètres, suffisante pour la connaissance du terrain. En intérieur, la triangulation par balise BLE prend le relais. Lorsque la précision du positionnement est inférieure au mètre, comme dans les zones d'exclusion de machines, les ancres UWB complètent le dispositif. Le passage d'un mode à l'autre s'effectue automatiquement en fonction de la puissance du signal satellite, sans intervention de l'opérateur.
2.3 Fiabilité des alertes en temps réel
En cas de chute, une alerte de sécurité qui met quarante secondes à arriver est beaucoup trop lente pour être utile.
Voici la répartition simple :
1. Connexion (LTE Cat-1)
La plupart des appareils utilisent LTE Cat-1 pour les données. C'est le meilleur choix car :
- Il utilise le même Signal 4G votre téléphone utilise.
- Il envoie des messages rapidement.
- Elle consomme très peu de batterie comparée à une connexion internet haut débit standard.
2. Signal de secours
Si un travailleur se trouve dans une zone isolée sans réseau de téléphonie mobile, l'appareil utilise LoRa.
- Il peut envoyer un « SOS » et votre position (GPS) via plusieurs kilomètres.
- C'est très lent, mais ça fonctionne même en l'absence de 4G.
3. Mémoire locale
À chaque alerte, l'appareil enregistre également une copie des informations à l'intérieur du mémoire interne.
- Si le signal est interrompu pendant l'envoi, les données ne sont pas perdues.
- L'appareil attend que le travailleur soit de retour dans une zone de signalisation.
2.4 Gestion de l'alimentation
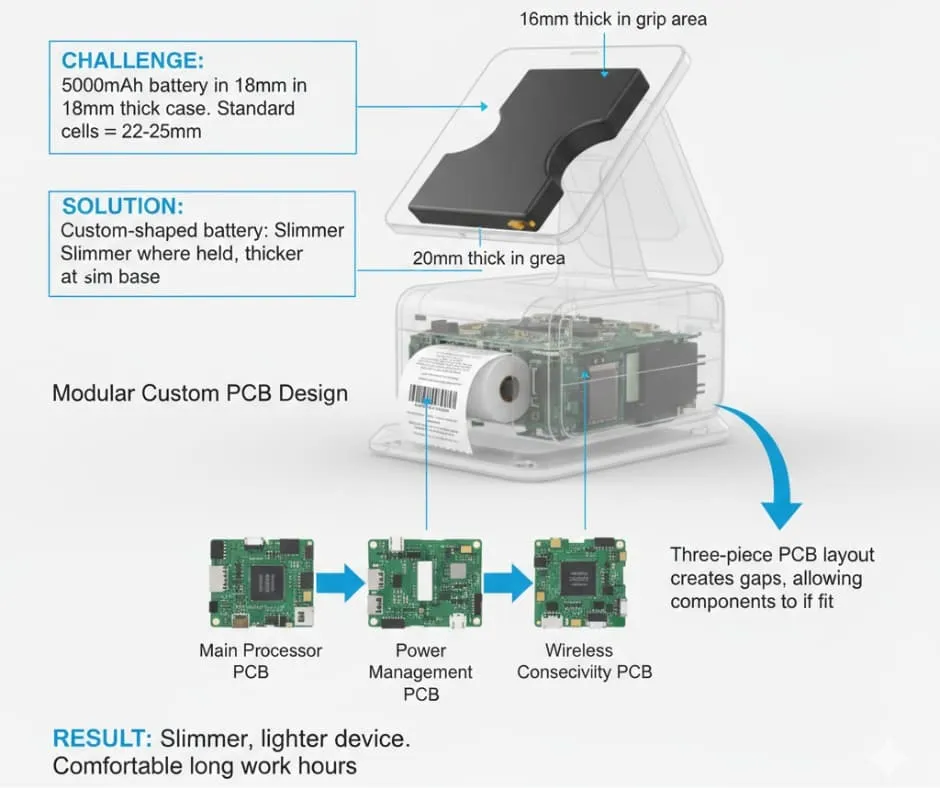
Une batterie de 4 000 mAh montée à l'avant du casque déplace le centre de gravité vers l'avant et provoque des douleurs cervicales en quelques heures. La batterie de série, d'une capacité de 3 200 mAh, est placée à l'arrière du casque pour contrebalancer le module électronique avant. La fréquence d'interrogation du GPS est d'une seconde en mouvement et passe à quinze secondes lorsque l'accéléromètre est immobile. Le modem LTE se met en veille entre les transmissions. Grâce à ces ajustements, l'autonomie sur le terrain atteint quinze heures, dépassant largement l'objectif de douze heures.
3. Conception de l'architecture du système
3.1 Plateforme de traitement centrale
Le cerveau de cet appareil est une petite puce très performante en calcul. Elle utilise un programme simple pour gérer différentes tâches, comme la détection des chutes et l'envoi de messages. Les concepteurs ont opté pour un petit cerveau car il consomme très peu d'énergie, démarre instantanément et est plus simple à utiliser. Une seconde puce auxiliaire, tout aussi minuscule, reste constamment active pour surveiller les mouvements. Cela permet au cerveau principal de s'éteindre complètement et d'économiser la batterie jusqu'à ce que la puce auxiliaire détecte une chute et le réactive.
3.2 Intégration des capteurs
L'unité de mesure inertielle est un dispositif MEMS à six axes intégrant un accéléromètre et un gyroscope à trois axes. Lors de la détection d'activité, l'accéléromètre échantillonne à 400 Hz pour alimenter le système de détection de chute. Le module GPS, compact (18 mm), est doté d'une antenne intégrée et assure un démarrage à froid en moins de trente secondes en ciel ouvert.
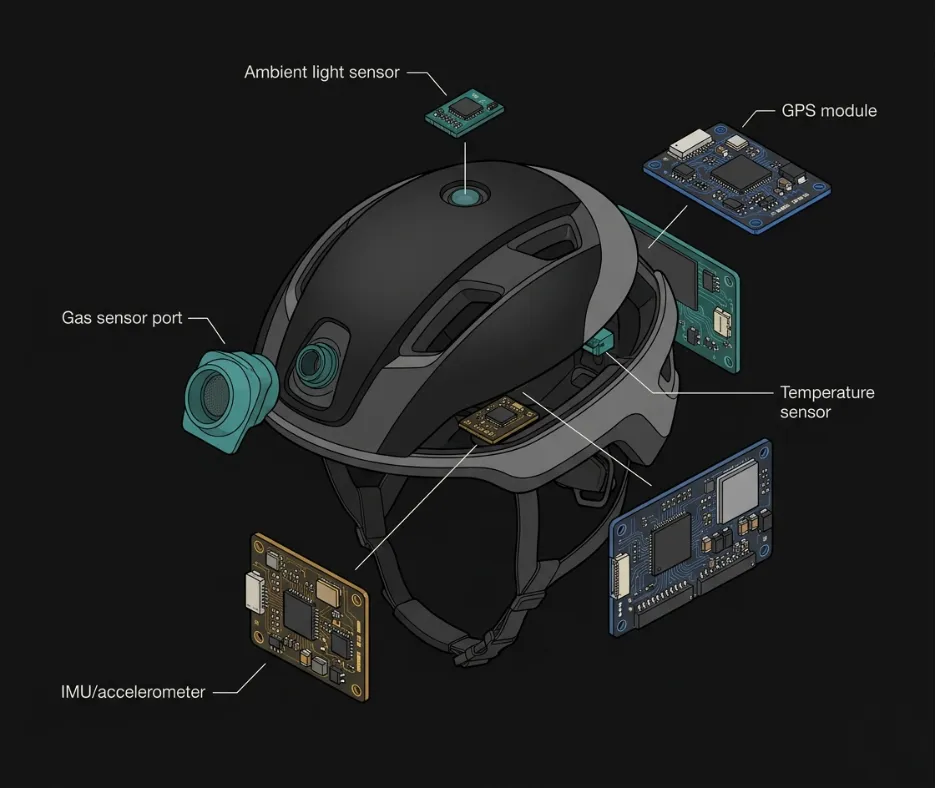
Un capteur de température à un fil surveille les conditions thermiques ambiantes et celles de la batterie. Deux ports pour capteurs de gaz (en option) acceptent les modules électrochimiques de CO et de H₂S via un connecteur standardisé ; ainsi, la même carte de circuit imprimé de base convient aussi bien aux environnements de construction standard qu’aux environnements à haut risque de présence de gaz.
3.3 Architecture de communication
La connectivité est assurée par quatre protocoles. La LTE Cat.1 gère la transmission des données principales et des alertes. Le Bluetooth 5.0 assure le jumelage avec l'application mobile associée et pilote la géolocalisation intérieure grâce à la détection des balises BLE. Le LoRa prend le relais pour les communications d'urgence en cas de défaillance du réseau cellulaire. Un bouton SOS câblé, indépendant de l'état du micrologiciel, déclenche une alerte même en cas de plantage de l'application principale.
3.4 Intégration du cloud et du backend
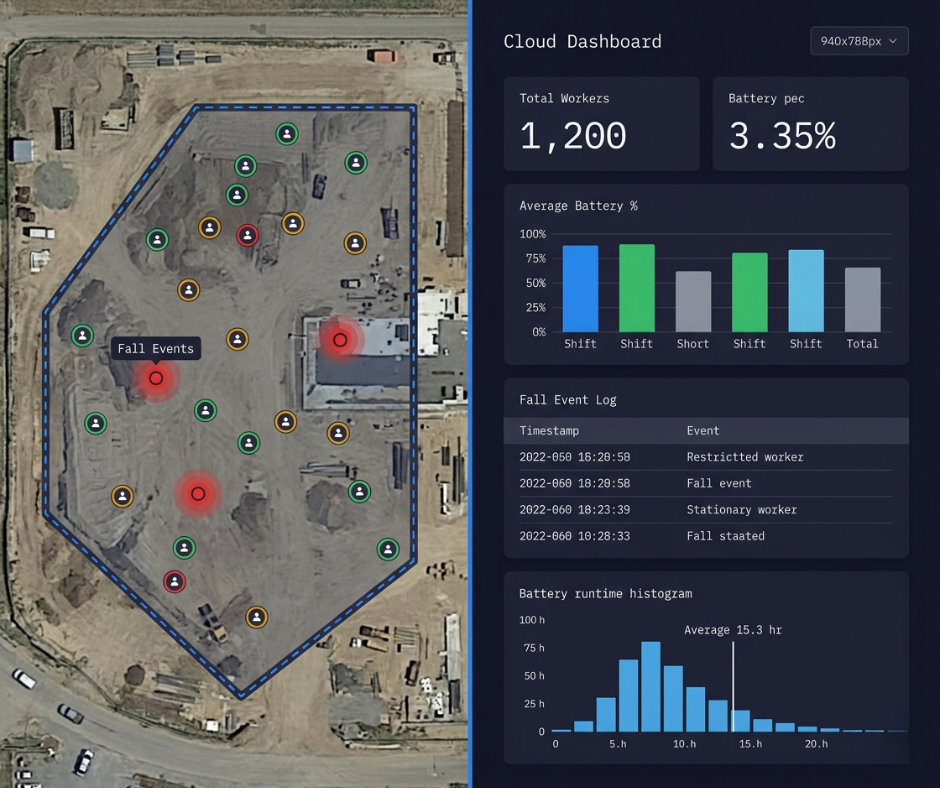
Les données transitent par le cloud via un courtier MQTT, choisi pour sa faible surcharge sur les liaisons cellulaires limitées. Le tableau de bord web affiche en temps réel la position des travailleurs sur un plan du site, avec un code couleur selon leur état d'activité. Les chutes, les franchissements de zone géographique et les activations SOS génèrent chacun un enregistrement d'incident horodaté. La mise à jour du firmware par OTA déploie les mises à jour sur l'ensemble du parc de casques sans nécessiter leur rappel physique.
4. Ingénierie des circuits imprimés et du matériel
4.1 Conception de circuits imprimés multicouches compacts
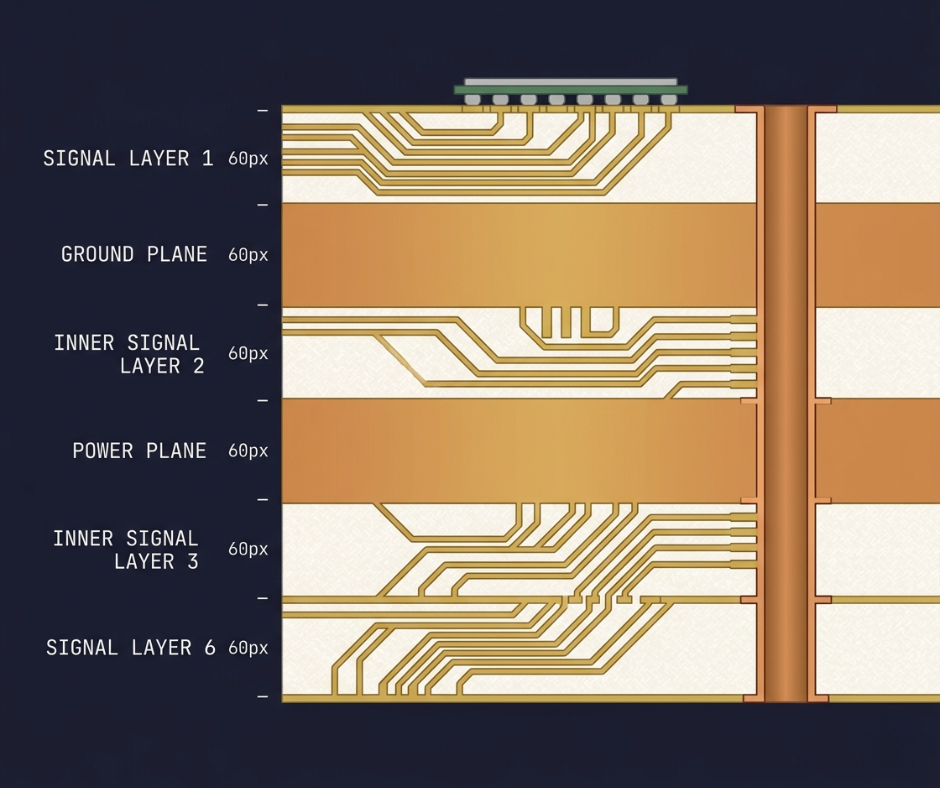
La carte principale est une conception à six couches de 58 mm x 42 mm. Le plan de masse RF est situé directement sous la couche de signal supérieure, ce qui permet de réduire la longueur des pistes d'antenne et d'assurer une impédance contrôlée. Le modem LTE et le module GPS occupent les coins opposés de la carte, séparés par une barrière de cuivre qui empêche la désensibilisation du récepteur par l'émetteur LTE. Des blindages EMI sont soudés sur les deux sections RF. Le routage des couches internes utilise des coudes à 45 degrés plutôt que des angles droits afin de réduire les réflexions haute fréquence.
4.2 Système de gestion de l'alimentation
Le circuit intégré de gestion de l'alimentation assure quatre fonctions : la charge de la batterie jusqu'à 1 A, la distribution de l'alimentation sur les rails 1.8 V, 3.3 V et 5 V, la communication de l'état de charge de la batterie via I2C et la protection contre les surtensions, les surintensités et les décharges profondes. La charge accepte l'alimentation via USB-C et le contact à ressort du socle de chargement. Un circuit intégré dédié à l'indicateur de charge mesure la capacité restante avec une précision inférieure à 3 % quelle que soit la température. Le firmware effectue une lecture de cette valeur toutes les 30 secondes et l'affiche avec les données de position.
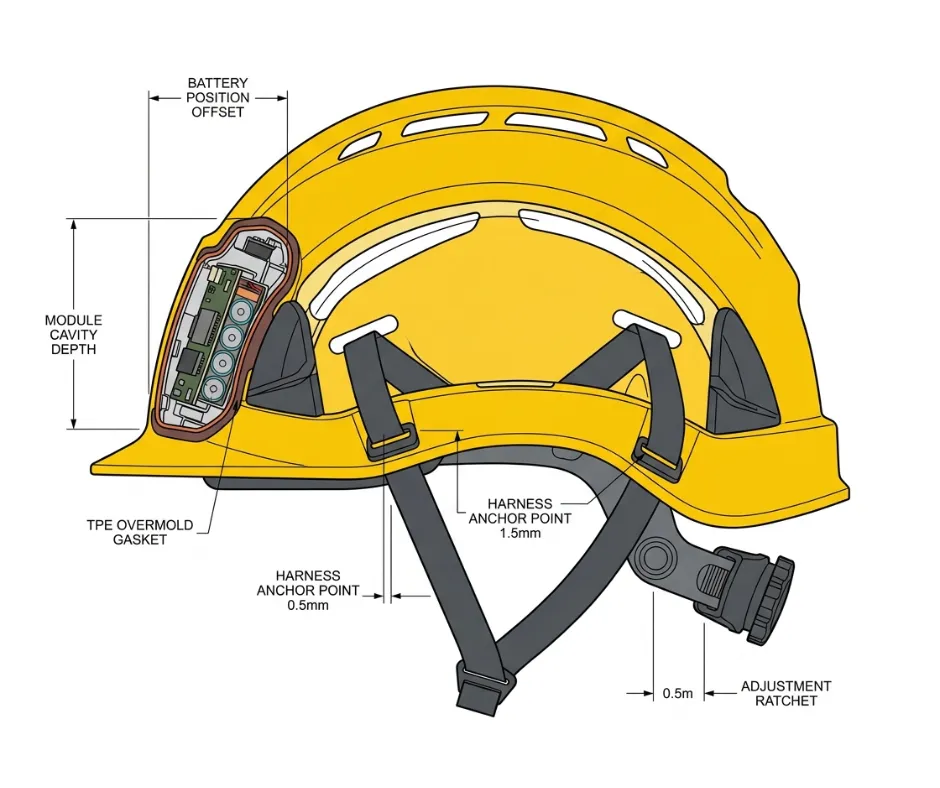
4.3 Module électronique résistant aux chocs
Le circuit imprimé est monté sur quatre entretoises M2 avec des rondelles en néoprène entre la carte et le châssis, absorbant ainsi le pic d'accélération dû à une chute de deux mètres. Des connecteurs encapsulés sur tous les faisceaux de câbles externes empêchent l'humidité de pénétrer à la sortie des câbles du boîtier du module. Ce dernier est en ABS de 2.5 mm d'épaisseur avec un surmoulage en TPE à l'interface avec la coque, assurant l'étanchéité requise pour la norme IP67 selon les tests IEC 60529.
5. Conception mécanique et industrielle
5.1 Intégration structurelle du casque
Le module électronique est logé dans une cavité intégrée à la face arrière de la coque lors de la fabrication, et non découpé ultérieurement dans une coque existante.
Cette particularité a permis de préserver la géométrie structurelle lors des essais d'atténuation des chocs selon la norme EN 397. Le boîtier a passé avec succès des tests de chute répétés, avec l'ensemble des composants électroniques installés, confirmant ainsi que la masse supplémentaire n'entravait pas la protection. Le remplacement de la batterie est possible sur site, mais le démontage du module principal nécessite un outil spécifique, ce qui évite tout démontage accidentel.
5.2 Ergonomie et confort
Le poids total, batterie incluse, est de 520 grammes, ce qui est acceptable pour un port continu de huit heures. Le harnais interne à six points a été repensé avec un décalage de 15 mm vers l'avant, déplaçant ainsi le centre de gravité du casque vers l'arrière afin de compenser la charge des composants électroniques à l'avant. Les canaux de ventilation de la coque restent dégagés. Des tests effectués à une température ambiante de 38 °C ont confirmé que le module électronique ne génère aucun point de concentration de chaleur au niveau du cuir chevelu.
5.3 Conception modulaire
Le bloc-batterie se retire par une ouverture latérale et se verrouille d'un quart de tour. Son remplacement prend moins de trente secondes et ne nécessite aucun outil. Sur les chantiers, de jour comme de nuit, les utilisateurs emportent des batteries de rechange en charge. Ils peuvent ainsi remplacer une batterie faible par une batterie pleine afin que le casque reste toujours opérationnel. De plus, il est possible de transformer un casque en détecteur de gaz : inutile d'acheter une nouvelle carte électronique interne. Il suffit de débrancher l'ancienne pièce et de brancher un nouveau module capteur à l'aide d'un simple connecteur, une solution bien plus simple et économique.
6. Fonctionnalités logicielles et d'IA
6.1 Algorithme de détection de chute
Une approche basée uniquement sur un seuil génère trop de fausses alertes dues aux mouvements des travailleurs (accroupissement, montée d'échelle, chute du casque, etc.). L'algorithme utilise donc trois phases. La première phase détecte la signature d'une chute libre : des mesures de faible accélération (g) soutenues sur les trois axes, correspondant à la phase d'apesanteur d'une chute réelle.

La deuxième phase détecte un événement à fort impact dépassant un seuil configurable. La troisième phase attend huit secondes que le travailleur reprenne ses mouvements normaux. Dans le cas contraire, l'événement est classé comme une chute et une alerte est déclenchée. Comparée à un système à seuil unique, cette approche en trois phases a permis de réduire d'environ 70 % les alertes intempestives lors d'essais sur le terrain.
6.2 Géorepérage et zones de sécurité
Les responsables utilisent une carte informatique pour délimiter les zones de sécurité autour des secteurs dangereux, comme les zones à risque d'explosion ou à haute tension. Si un travailleur pénètre dans l'une de ces zones, le dispositif émet une alerte immédiate. Ce dernier est suffisamment intelligent pour identifier ces zones de manière autonome. Ainsi, même en cas de faible connexion internet, l'alarme se déclenche pour assurer la sécurité du travailleur.
6.3 Communication d'urgence
Appuyer sur le bouton SOS génère un paquet prioritaire contenant les coordonnées GPS, l'identifiant de l'appareil et l'horodatage. Ce paquet est transmis simultanément via tous les réseaux disponibles, LTE en priorité et LoRa en cas de besoin. La plateforme signale les appels SOS comme prioritaires et peut envoyer des notifications SMS aux contacts d'urgence préconfigurés. Le module vocal bidirectionnel (en option) utilise la connexion LTE, permettant ainsi à un superviseur de site de communiquer directement avec un travailleur en difficulté sans radio supplémentaire.
7. Sécurité et conformité
7.1 Normes de sécurité relatives aux casques
Ce casque de sécurité répond aux normes de sécurité officielles les plus strictes en vigueur aux États-Unis, en Europe et au Canada. Point essentiel, il a été testé et homologué avec tous les composants électroniques intégrés. Cela a nécessité une étroite collaboration avec le laboratoire d'essais lors de la conception de l'outillage. Toute modification de la géométrie de la coque après la première homologation entraîne un nouvel essai complet ; il était donc impératif que la conception de la cavité soit parfaite dès la première révision de l'outillage.
7.2 Conformité électronique
L'ensemble radio bénéficie de l'homologation FCC pour l'Amérique du Nord et du marquage CE conformément à la directive européenne sur les équipements radioélectriques. La conformité RoHS a été vérifiée lors de l'approvisionnement en composants, en exigeant la documentation de chaque fournisseur avant toute commande. Le bloc-batterie est certifié UN38.3 pour le transport aérien, une exigence du client pour la distribution internationale. La déclaration REACH couvre l'intégralité de la nomenclature.
7.3 Normes d'essais environnementaux
L'étanchéité IP67 a été vérifiée par immersion dans l'eau à un mètre de profondeur pendant trente minutes, sans aucune infiltration. Des tests de vibration ont été effectués sur le casque assemblé, placé sur une table vibrante selon le profil IEC 60068-2-6 pendant deux heures par axe. Les tests de cyclage thermique ont couvert une plage de températures allant de -20 °C à +70 °C sur vingt cycles. Les tests d'émissions électromagnétiques rayonnées ont confirmé que le dispositif ne perturbe pas les communications radio du site ni les réseaux de capteurs sans fil déjà déployés sur les chantiers.
8. Tests et validation
8.1 Tests fonctionnels
Les tests de précision GPS ont utilisé un récepteur GNSS de référence pour comparer les relevés en trente points d'un champ ouvert. Le GPS intégré au casque a affiché une précision moyenne de 4.2 mètres par rapport à la référence. L'étalonnage de l'accéléromètre a été réalisé à l'aide d'un banc d'essai statique à six positions afin de vérifier l'alignement des axes et la correction du décalage. Les tests de débit LTE ont mesuré le temps de chargement d'un paquet de données complet pour les capteurs, avec des niveaux de signal descendant jusqu'à -110 dBm, confirmant ainsi la transmission en bordure de cellule, zone où se situent de nombreux chantiers.
8.2 Test de durabilité
La carte de circuit imprimé a résisté à des chutes répétées de 1.5 mètre sur une plaque d'acier, ce qui a été vérifié par une inspection visuelle à un grossissement de 10x et un test fonctionnel complet après chaque chute. Aucune défaillance de soudure ni de connecteur n'a été constatée. Un test de vibration continu de 500 heures sur un banc d'essai de vibrations automobiles n'a révélé aucune migration de composants. Après 60 jours d'exposition aux intempéries sur dix unités assemblées, toutes les unités ont passé avec succès la vérification fonctionnelle.
8.3 Tests de batterie et de performance
Quinze unités ont exécuté un protocole de simulation sur le terrain : connexion LTE, interrogation GPS à une seconde d’intervalle, diffusion BLE active et enregistrement des données des capteurs toutes les cinq secondes. L’autonomie moyenne de l’ensemble du parc était de 15.3 heures. Trois unités ont dépassé seize heures. Aucune n’est descendue en dessous de quatorze heures. Après 500 cycles complets de charge et de décharge, toutes les batteries conservaient plus de 80 % de leur capacité, ce qui correspond à un intervalle de remplacement sur le terrain de dix-huit mois à deux ans en utilisation quotidienne.
9. Fabrication et production de masse
9.1 Optimisation DFM
L'analyse de la conception en vue de la fabrication, pour une commande minimale de 500 unités, a permis d'identifier trois leviers de réduction des coûts. Les boîtiers de blindage RF, initialement fabriqués en tôle pliée sur mesure, sont désormais emboutis, ce qui a permis de réduire le coût unitaire de 22 %. Un module GPS alternatif, aux spécifications électriques identiques, a été validé auprès d'un second fournisseur, éliminant ainsi le risque lié à un fournisseur unique. La rationalisation des points de test a permis de simplifier les montages de test et de réduire le temps de test par unité de 4.5 à 2.8 minutes.
9.2 CMS et assemblage
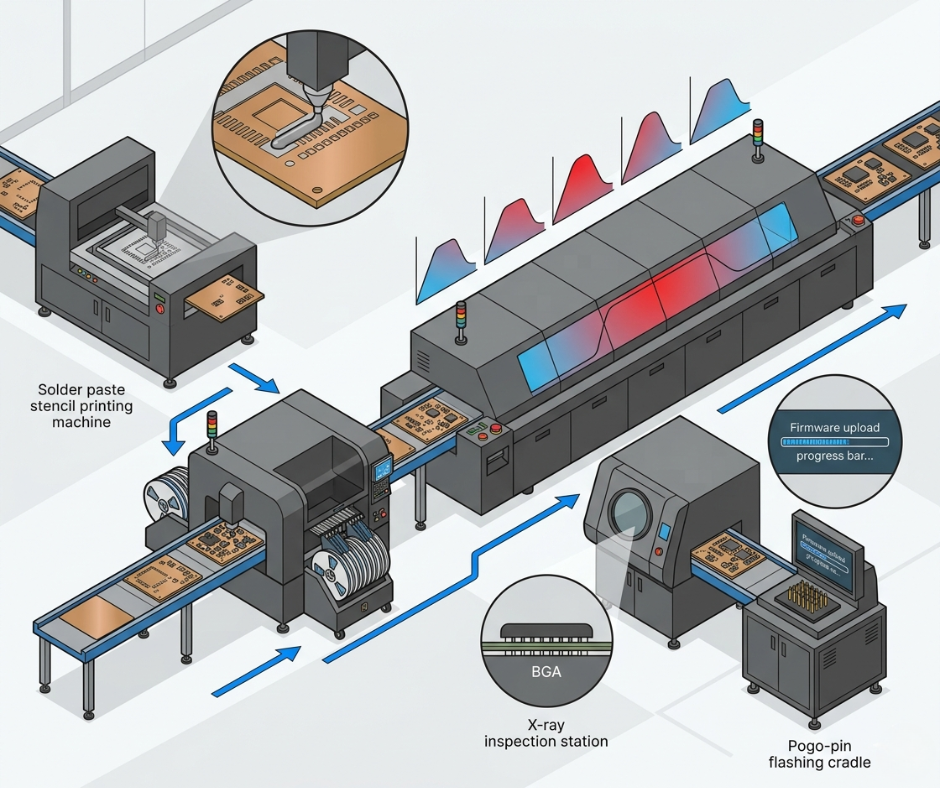
L'assemblage du circuit imprimé est réalisé dans un four de refusion à six zones, dont le profil est adapté aux exigences de soudure du modem LTE BGA. Chaque carte est inspectée par rayons X afin de vérifier l'intégrité des joints BGA. Un joint en silicone bi-composant assure l'étanchéité entre le boîtier du circuit imprimé et la cavité du boîtier, sa compression étant contrôlée par un couple de serrage spécifique appliqué aux quatre vis imperdables M3. La mise à jour finale du firmware utilise un support à broches qui programme les quatre zones de mémoire, effectue un autotest et inscrit le numéro de série de l'unité dans la mémoire non volatile en soixante secondes.
9.3 Assurance qualité
Chaque unité est soumise à des tests fonctionnels automatisés portant sur l'acquisition GPS, l'enregistrement LTE, la diffusion BLE, la réponse de l'accéléromètre, l'actionnement des boutons, la précision de la tension de la batterie et l'intégrité du joint IP par un test de dégradation de la pression. Un rodage de 48 heures à 45 °C élimine les défauts de jeunesse avant expédition. Deux pour cent des unités font l'objet de tests RF par rapport à une référence calibrée afin de détecter les défauts d'assemblage d'antenne non visibles à l'œil nu.
10. Résultats du projet
10.1 Réalisations techniques
La version finale offre une précision GPS inférieure à cinq mètres en extérieur et une précision BLE de un à deux mètres en intérieur grâce à des balises. Le casque détecte très bien les chutes : lors des tests, il a affiché un taux de réussite de 98 %. Les fausses alertes sont quasi inexistantes. De plus, son autonomie dépasse les 15 heures, vous permettant de l'utiliser toute la journée.
10.2 Déploiement sur le marché
Le premier déploiement a permis d'intégrer 1 200 travailleurs répartis sur trois chantiers actifs à la plateforme. Le tableau de bord a suivi leurs positions en temps réel et généré automatiquement des rapports de sécurité. Au cours des soixante premiers jours, quatorze chutes réelles ont été enregistrées, chacune ayant nécessité une intervention rapide d'un superviseur. Le cadre OEM permet aux distributeurs régionaux d'intégrer leur propre marque, d'adapter les configurations de géorepérage aux différents types de chantiers et de choisir entre les capteurs standard et ceux équipés d'un détecteur de gaz, à partir d'une unité de base commune.
11. Agrandissement futur
11.1 Intégration vidéo IA
Une variante de module caméra intègre un capteur grand angle au niveau des sourcils. L'inférence embarquée, grâce à un modèle CNN compressé, détecte les non-respects des EPI, comme le retrait du casque par un travailleur dans une zone où le port est obligatoire, sans transmission de la vidéo brute vers le cloud. Le traitement en périphérie permet de pallier les limitations de bande passante et les problèmes de confidentialité des travailleurs sans nécessiter de modifications d'infrastructure sur site.
11.2 Écosystème de construction intelligente
Le casque est associé à un gilet de sécurité connecté, équipé de ses propres capteurs, formant ainsi un réseau de capteurs corporels pour chaque travailleur. Les deux dispositifs partagent une identité cloud unique, permettant à la plateforme de croiser les données de posture du gilet avec les données de mouvement du casque pour une évaluation plus précise des risques ergonomiques. L'analyse des flottes signale les sites ou les équipes présentant des taux d'incidents statistiquement élevés avant même qu'un accident ne survienne.
12. Pourquoi cette approche de développement fonctionne
Concevoir un casque de sécurité intelligent ne se résume pas à un simple développement logiciel auquel on rattache quelques composants électroniques. La norme du casque est primordiale, et l'électronique s'intègre ensuite à l'espace disponible. Cette approche exige une équipe ayant une solide expérience des programmes de certification, une connaissance approfondie des contraintes structurelles des normes EN 397 et ANSI Z89.1, et une capacité à concevoir la géométrie du circuit imprimé en fonction de l'espace disponible sur la coque, plutôt que de s'attendre à ce que celle-ci s'adapte à l'empreinte d'un module standard. Le résultat : un dispositif qui permet aux responsables de site de concilier protection des travailleurs et connectivité. Les deux sont certifiés, maintenus par mises à jour OTA et évolutifs pour accompagner le déploiement.
Prêt à développer un casque de sécurité intelligent ou un dispositif industriel connecté ? Contactez l'équipe d'ingénierie de Wonderful PCB pour définir votre solution personnalisée de sécurité des travailleurs.