ÉTUDE DE CAS
Une étude de cas technique sur un scanner de diagnostic automobile portant sur plus de 200 000 unités expédiées via plusieurs lignes ODM — couvrant les décisions d’architecture réelles, une panne sur le terrain qui a bouleversé nos règles en matière de circuits imprimés et les données qui sous-tendent les véritables facteurs de retour.
| 200k+Unités expédiées | 4.2 % → 0.3 %Taux d'échec des communications | 68 %RMA : Données OEM manquantes | 40-60%Couverture réellement améliorée |
1. Aperçu du projet
1.1 Contexte du client
Le client était une marque d'équipements pour services automobiles disposant d'une gamme d'outils OBD d'entrée de gamme bien établie (adaptateurs basés sur la technologie ELM327 et lecteurs de codes basiques). Il souhaitait monter en gamme et proposer des scanners multisystèmes professionnels.
Marché cible : ateliers de réparation indépendants, services d’entretien de flottes et ateliers de concessionnaires. Dès le départ, les marchés ciblés étaient l’Amérique du Nord et l’Europe, l’Asie étant prévue pour une seconde phase.

L'écart qu'ils cherchaient à combler était bien réel. Les outils d'entrée de gamme lisent les codes génériques du groupe motopropulseur. Les ateliers professionnels ont besoin des données en temps réel de l'ABS, du SRS, de la transmission, du TPMS, des commandes bidirectionnelles et de l'ECU pour des dizaines de marques. Ce changement ne se limite pas à une simple mise à jour du firmware. Il s'agit d'un système matériel et logiciel entièrement différent.
Lisez aussi: Étude de cas sur les tablettes durcies
1.2 Objectifs du projet
• La conformité totale à la norme OBD-II est le minimum requis, et non le maximum.
• Prise en charge multiprotocole des protocoles CAN, LIN et FlexRay
• Analyse en temps réel des données de l'ECU avec une faible latence
• Connectivité sans fil pour la synchronisation dans le cloud et les diagnostics à distance
• Durabilité de qualité industrielle pour les environnements d'atelier
• Conception prête pour la production et approuvée pour la certification mondiale
• Une voie de mise à niveau claire pour les diagnostics des véhicules électriques sans refonte matérielle complète
2. Défis de l'industrie dans le développement des outils de diagnostic automobile
2.1 Compatibilité multiprotocole
L'affirmation « Compatible avec plus de 95 % des modèles de véhicules » figure sur tous les emballages de scanners du marché. Après avoir expédié plus de 200 000 unités, des clones ELM327 aux tablettes multiprotocoles complètes, nous pouvons vous révéler ce que ce chiffre cache réellement.
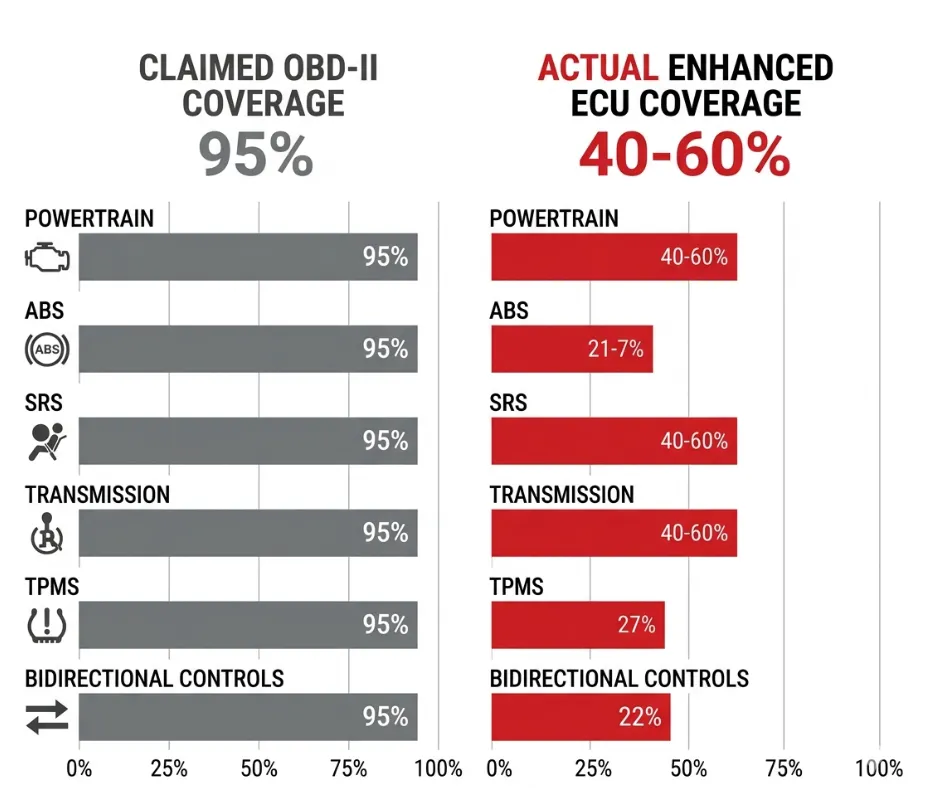
Il assure uniquement la conformité OBD-II de base (modes 01 à 0A des normes SAE J1979 et ISO 15031) sur cinq protocoles hérités : ISO 9141-2, ISO 14230-4 KWP2000, SAE J1850 PWM et VPW, et ISO 15765-4 CAN à 250 et 500 kbit/s. Concrètement, l’appareil lit les PID génériques du groupe motopropulseur, l’état du témoin MIL et les données figées sur tout véhicule américain immatriculé à partir de 1996 et répondant aux exigences légales minimales.
Ce qui n'est pas couvert : les PID définis par le constructeur, l'accès aux modules ABS/SRS/transmission/TPMS, les commandes bidirectionnelles, les adaptations et les clés d'accès sécurisées. Les véhicules postérieurs à 2018 utilisant l'UDS sur CAN ou CAN FD accentuent encore cette lacune. Lors de nos tests sur une flotte de 50 véhicules, les scanners annonçant une compatibilité de base de 95 % n'ont atteint en moyenne que 40 à 60 % de compatibilité avec les données améliorées des véhicules non destinés au marché américain.
| Les ingénieurs chargés des achats de systèmes de mesure doivent exiger : une matrice de couverture détaillée, enrichie par les constructeurs, au format Excel, ventilée par marque, modèle et année, indiquant les codes défauts améliorés pris en charge par calculateur, l’état CAN FD et DoIP, la capacité de transmission J2534 et la fréquence de mise à jour de la base de données. Tout le reste relève du marketing. |
2.2 Stabilité de la communication de l'ECU
L'environnement électrique d'un véhicule est hostile. Les injecteurs diesel à rampe commune, les variations de charge de l'alternateur et les coupures de courant lors du démarrage du moteur génèrent des transitoires imperceptibles lors des tests en laboratoire. La tension aux bornes du port OBD oscille entre 9 V et 36 V selon le véhicule, son état de charge et les autres appareils connectés au bus. La protection contre l'inversion de polarité est obligatoire et fait partie intégrante de la garantie.
Nous l'avons appris à nos dépens. Un projet ODM de 2023 utilisant un SoC GD32F103 avec un émetteur-récepteur CAN TJA1050 a réussi tous les tests en laboratoire : diagrammes de l'œil impeccables, aucune perte de paquets à 500 kbit/s. La première panne sur le terrain est survenue dans un atelier européen, sur un Mercedes Sprinter diesel de 2019. L'unité se déconnectait du bus de manière intermittente, générait des codes d'erreur U0100 (perte de communication) et corrompait les effacements de codes défauts. Cause principale : diodes TVS sous-dimensionnées et absence de bobines de mode commun sur les ports CANH et CANL. Les transitoires de tension, conformément à la norme ISO 7637-2 (impulsions 3a et 3b), jusqu'à ±150 V lors du démarrage du moteur, étaient directement transmis par le connecteur OBD. L'émetteur-récepteur a passé avec succès les tests en laboratoire, mais a cessé de fonctionner sur le terrain après environ 200 heures cumulées.
2.3 Complexité des bases de données logicielles
Nos données RMA, portant sur 120 000 unités et couvrant une période de 18 mois, révèlent que 68 % des retours sont dus au motif « ne fonctionne pas sur mon XYZ 2024 », même lorsque le matériel prend en charge les protocoles requis. L’entrée spécifique au constructeur était manquante dans la base de données, ou la négociation de la clé de sécurité a échoué sans avertissement. Les unités dont la base de données OTA est rarement mise à jour affichent des taux de retour de 18 à 22 % lors de la sortie d’un nouveau modèle. Il s’agit d’un problème commercial, et non d’un problème matériel.
2.4 Environnement d'atelier robuste
Les mécaniciens ne ménagent pas les tablettes de diagnostic. Ils les laissent branchées pendant les tests d'alternateur, les cycles de démarrage et les démarrages d'urgence. Les outils tombent des portières, se couvrent d'huile et passent la nuit dans des fourgons non chauffés. La plage de températures de fonctionnement, de -10 à 55 °C, n'est pas une donnée technique : elle correspond aux températures réelles auxquelles la tablette est exposée, entre un matin de janvier sur un parking du Minnesota et un compartiment moteur en plein été au Texas.
3. Conception de l'architecture du système
3.1 Plateforme de traitement centrale
Le processeur d'application principal est un ARM Cortex-A exécutant Android embarqué ou Linux. Android est privilégié pour sa rapidité de développement d'interface utilisateur et la maturité de son écosystème OTA. Linux offre une meilleure latence pour les diagnostics. Un microcontrôleur dédié gère la couche de contrôle de communication séparément ; le fait de déconnecter le processeur d'application du bus du véhicule réduit la latence, améliore l'isolation des erreurs et empêche une panne logicielle d'interrompre les sessions ECU actives. L'objectif était un temps de démarrage inférieur à 10 secondes, de la mise sous tension à l'état prêt pour les diagnostics.
3.2 Interface de communication du véhicule
Le connecteur OBD-II à 16 broches constitue le point d'entrée, mais c'est au niveau de la couche physique sous-jacente que la plupart des conceptions échouent. L'architecture utilise des émetteurs-récepteurs CAN haut et bas débit, un circuit intégré de commande de lignes K et L dédié (et non des transistors discrets), un émetteur-récepteur LIN et, en option, une interface DoIP via Ethernet pour les plateformes 2020 et ultérieures.
Le choix du pilote de ligne K est plus important qu'il n'y paraît. Les solutions discrètes bon marché ne possèdent pas la tolérance 12 V, le contrôle de la vitesse de balayage ni la protection contre la surchauffe d'un circuit intégré dédié comme le L9637. Sur les anciens calculateurs asiatiques et européens qui appliquent une tension de 12 V lors de l'initialisation, la différence se traduit par des communications intermittentes, quasiment impossibles à déboguer sur le terrain. La prise en charge DoIP nécessite un PHY Ethernet, des composants magnétiques et une pile TCP/IP sur le microcontrôleur, ce qui représente un surcoût de 8 à 12 dollars avant même de prendre en compte la complexité du firmware. Il ne s'agit pas d'une simple option logicielle.
3.3 Connectivité sans fil
• Wi-Fi 5 et 6 pour une synchronisation de base de données à haut débit et l'enregistrement des sessions dans le cloud
• Bluetooth 5.0 pour le jumelage avec un PC d'atelier et l'affichage à distance
• Module 4G LTE optionnel pour le diagnostic dans le cloud depuis les véhicules sur le terrain
• Le module LTE prend également en charge l'assistance technique à distance avec partage de flux de données en direct
3.4 Stockage et sécurité
Le stockage eMMC varie de 32 à 128 Go selon le niveau de référence. La base de données véhicule, avec une couverture complète des constructeurs pour les marques américaines, européennes et asiatiques, atteint à elle seule plus de 20 Go, sans compter les journaux et les enregistrements de session. L'architecture de mise à jour sécurisée du firmware utilise des packages de mise à jour signés, une chaîne de démarrage vérifiée et des canaux OTA chiffrés. L'authentification des utilisateurs et le chiffrement des canaux de communication sont des prérequis pour tout outil professionnel destiné aux flottes ou aux concessions.
4. Ingénierie des circuits imprimés et du matériel
4.1 Conception de circuits imprimés multicouches
La panne du Mercedes Sprinter en 2023 a bouleversé nos règles de conception de circuits imprimés. L'analyse post-mortem a révélé des oscillations sur les lignes CAN dépassant 2 Vpp, une violation directe de la norme ISO 11898-2, dues à un filtrage de mode commun insuffisant et à une mauvaise séparation du plan de masse. Nous sommes passés à une architecture multicouche de 6 à 8 couches avec un plan de masse analogique dédié sous la section émetteur-récepteur. Aucune piste numérique ne traverse la zone du bus CAN. Des vias sont interconnectés tous les 5 mm autour de la section analogique. La compatibilité électromagnétique (CEM) est une contrainte initiale, et non un point d'audit a posteriori.
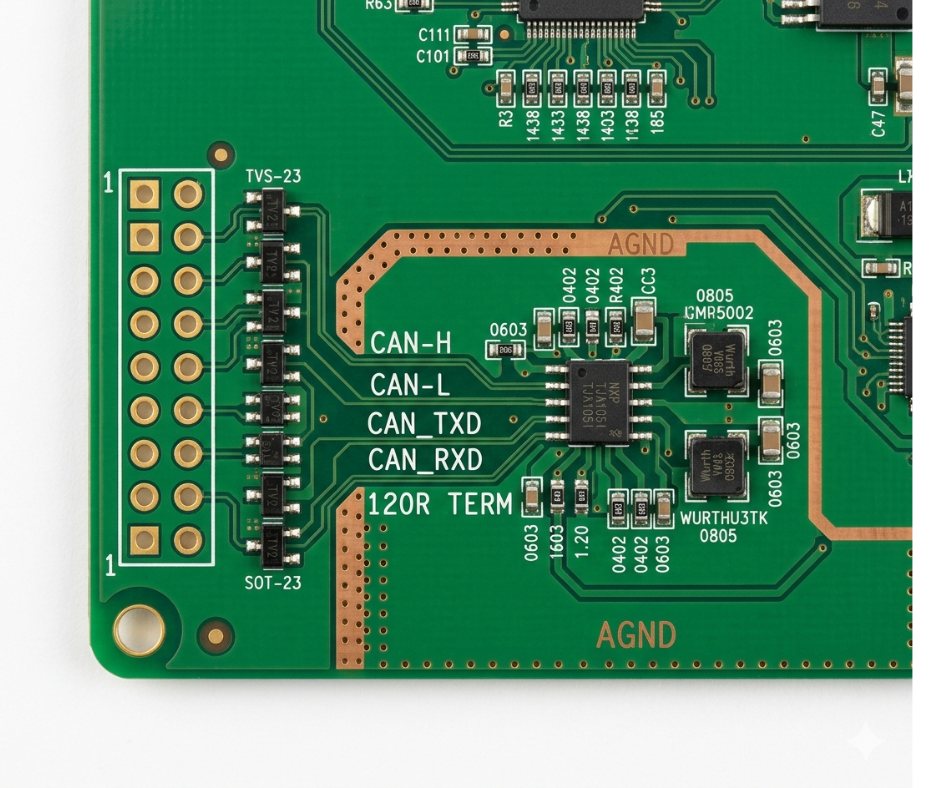
Utilisation intégrale de composants de qualité automobile : plages de températures de fonctionnement étendues, qualification AEC-Q100 le cas échéant, sélection de circuits intégrés à longue durée de vie avec stratégie de remplacement documentée avant la finalisation de la fabrication. La couche physique utilise un circuit intégré spécifique (ASIC) frontal dédié au protocole, avec terminaison programmable et logique de suppression d’impulsions.
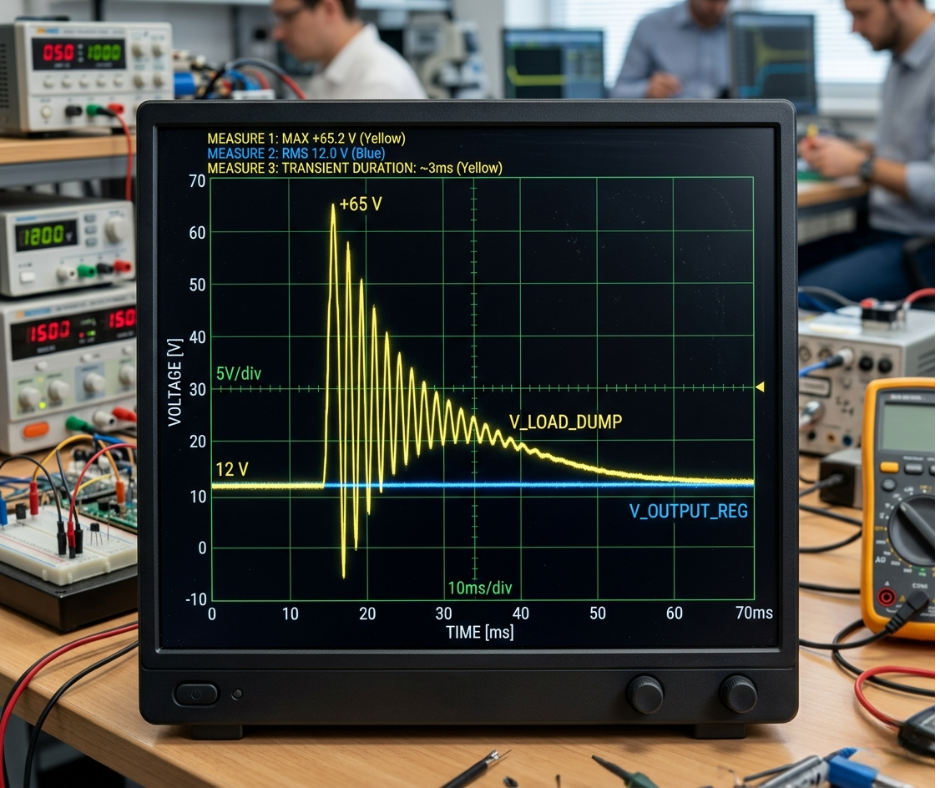
4.2 Conception de la gestion de l'alimentation
La protection contre les surtensions d'entrée couvre toute la plage de tension d'alimentation des véhicules, de 9 V à 36 V. La protection contre les décharges de charge gère les surtensions transitoires qui surviennent lors de la déconnexion d'une batterie d'un alternateur en marche ; cet événement génère des pics de tension supérieurs à 60 V susceptibles d'endommager les circuits non protégés. Les diodes TVS sont désormais des matrices bidirectionnelles conformes à la norme ISO 7637-3, et non plus les composants P6KE6.8A qui ont présenté des défaillances lors du projet Sprinter. Les versions portables intègrent un système de gestion de batterie pour une utilisation sans fil lors des inspections du véhicule.
4.3 Protection contre les décharges électrostatiques et les surtensions transitoires
Chaque broche OBD bénéficie d'une protection TVS bidirectionnelle conforme à la norme IEC 61000-4-2 ESD, de ferrites en série et d'un filtrage en mode commun de 100 nF et 100 pF. La conformité à la norme ISO 7637 est la norme documentée. Le niveau de protection réel de nos produits est plus élevé : les conditions réelles d'atelier dépassent les exigences des modèles standard.
5. Fonctionnalités logicielles et de diagnostic
5.1 Fonctionnalités de diagnostic principales
• Lire et effacer les codes d'anomalie (DTC) sur tous les calculateurs pris en charge, et pas seulement sur le groupe motopropulseur.
• Surveillance en temps réel du flux de données avec sélection et représentation graphique des PID configurables
• Capture de données figées en conditions de défaut
• État de préparation du moniteur pour les essais d'émissions
• Tests des capteurs d'oxygène et tests d'étanchéité du système EVAP selon le mode OBD-II 08
Ce sont les fonctionnalités obligatoires. Tous les scanners du marché les possèdent. La question n'est pas de savoir si elles existent, mais plutôt de savoir si elles fonctionnent de manière fiable sur l'ensemble du parc de véhicules.
5.2 fonctions avancées
Programmation et codage des calculateurs pour les plateformes compatibles – avec une mise en garde importante : le contournement complet du système de sécurité n’est pas disponible sur toutes les plateformes de véhicules de luxe et électriques à partir de 2024. Certains modules spécifiques à Mercedes, BMW et Tesla utilisent une sécurité à code tournant ou par certificat que nous ne parvenons pas à déchiffrer. Ceci est intentionnel. Nous conseillons à nos clients d’utiliser le scanner comme outil de diagnostic et de maintenance, et non comme un substitut à un appareil PASSTHRU de concessionnaire lorsque la programmation du calculateur est nécessaire.
Pour 95 % des interventions quotidiennes en garage, le scanner est suffisant. Pour les 5 % restants, notre outil de diagnostic, associé à la connexion J2534 au logiciel du constructeur, constitue la solution idéale. Cette transparence a permis d'accroître le nombre de commandes répétées des distributeurs, qui ne reçoivent plus d'appels mécontents concernant des promesses d'« accès complet » qui s'avèrent infondées sur le terrain.
• Réinitialisation du système TPMS et programmation des capteurs
• Diagnostic ABS et SRS avec données de capteurs en temps réel
• Remise à zéro des services : durée de vie de l'huile, usure des plaquettes de frein, enregistrement de la batterie
• Programmation des clés lorsque la sécurité du constructeur le permet
5.3 Intégration Cloud
Le diagnostic à distance via des sessions enregistrées dans le cloud permet à un technicien expérimenté de consulter les données en temps réel et l'historique des pannes depuis n'importe quel endroit. Génération de rapports de véhicule au format PDF pour la documentation d'entretien. Une base de données d'assistance technique en ligne, liée à l'identification du véhicule, réduit le temps de diagnostic sur les plateformes inconnues. L'intégration au tableau de bord de gestion de flotte est disponible pour les opérateurs exploitant plus de 10 véhicules.
« Sur une période de 18 mois, 68 % de nos demandes de retour de marchandise (RMA) étaient dues au motif « ne fonctionne pas sur mon véhicule de 2024 », et non à une panne matérielle. L’entrée dans la base de données était manquante ou la négociation de la clé de sécurité avait échoué sans avertissement. »
6. Conception mécanique et industrielle
6.1 Conception du boîtier
Indice de protection IP54 pour la version de base, IP65 pour la version premium. Surmoulage caoutchouté aux quatre coins et à l'arrière : un aspect purement fonctionnel. Les chutes depuis les seuils de portières de véhicules ou les bords d'établi constituent la principale cause de défaillance physique lors des retours sur site. Un cadre interne amortisseur isole la carte électronique des impacts sur le boîtier. Le connecteur OBD est renforcé séparément, car les contraintes exercées sur celui-ci par le poids du câble représentent une cause de défaillance à long terme, apparaissant après plus de 6 000 cycles de connexion.

6.2 Conception de l'interface utilisateur
Écran tactile capacitif de 7 à 10 pouces selon la référence. Réglage de la sensibilité tactile optimisé pour le port de gants : une configuration logicielle souvent négligée par les constructeurs, dont l’impact est immédiatement perceptible en atelier. Les mécaniciens portent constamment des gants en nitrile. Un scanner nécessitant une utilisation à mains nues est rapidement délaissé. Des boutons de raccourci physiques pour les quatre fonctions les plus courantes réduisent la dépendance à l’écran tactile pour une utilisation à une main.
6.3 Gestion thermique
Les boîtiers étanches ne peuvent pas utiliser de refroidissement actif. La conception thermique repose sur un dissipateur thermique interne en aluminium, collé au processeur et relié au panneau arrière du boîtier, qui fait office de radiateur passif. L'objectif de conception était d'assurer une stabilité de fonctionnement continue pendant un poste de 8 heures. Le but : maintenir des performances optimales à une température ambiante de 55 °C, même en cas d'utilisation à proximité du compartiment moteur.
7. Conformité et certification
7.1 Normes automobiles
La conformité à la norme ISO 7637 couvre la protection contre les surtensions transitoires sur les lignes d'alimentation et l'interface OBD. Cependant, cette norme représente un minimum, et non un maximum. La panne du Mercedes Sprinter était due aux surtensions transitoires de type Pulse 3a et 3b définies par la norme ISO 7637-2, que notre conception initiale avait sous-estimées dans un environnement automobile réel soumis à de fortes interférences électromagnétiques. La norme ISO 16750 couvre les charges environnementales et électriques des composants du véhicule. Nos spécifications de conception internes dépassent ces normes, notamment en ce qui concerne les valeurs de protection des diodes TVS et le filtrage en mode commun.
• ISO 7637 — Immunité aux transitoires et aux impulsions, protection de la ligne d'alimentation
• ISO 16750 — Exigences environnementales et électriques relatives aux composants des véhicules
• Conformité aux normes SAE J2534-1 et J2534-2 pour l'intégration logicielle OEM
7.2 Certifications mondiales
• Marquage CE — compatibilité électromagnétique et sécurité électrique pour le marché européen
• Autorisation de la FCC — Opérations sans fil en Amérique du Nord
• Conformité RoHS — restrictions relatives aux substances dangereuses pour les marchés de l'UE et d'Asie
• Évaluation REACH — par contenu chimique spécifique, le cas échéant
Toutes les certifications sont prises en charge dans le cadre du programme ODM. Le client reçoit un produit entièrement certifié et prêt à être commercialisé.
8. Tests et validation
8.1 Tests fonctionnels
La validation multimarque est effectuée sur notre flotte de 50 véhicules, mise à jour trimestriellement pour inclure les nouveaux millésimes. Cette flotte comprend des marques américaines, européennes et asiatiques, de 1996 à aujourd'hui. Les tests de stabilité de la communication du calculateur moteur vont au-delà de la simple vérification du protocole : nous effectuons des tests en présence de perturbations électriques, lors du démarrage du moteur et avec d'autres charges à courant élevé fonctionnant simultanément.
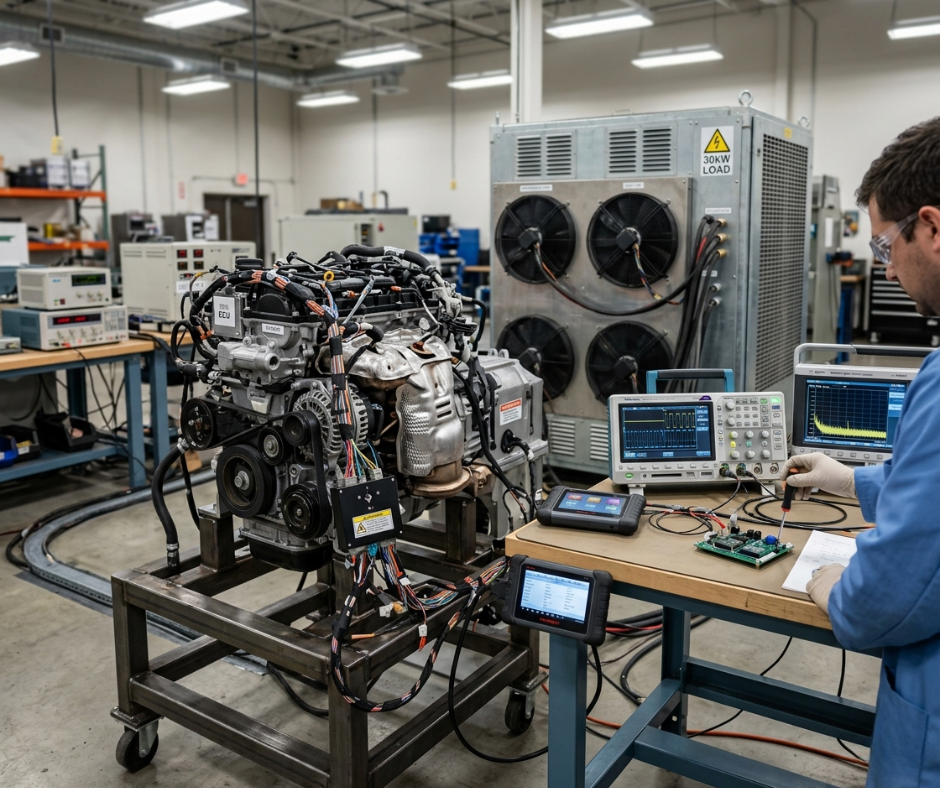
Les essais en boucle fermée sur un moteur diesel en marche, avec un banc de charge de 30 kW et un injecteur de bruit d'éclateur, sont désormais obligatoires avant la validation finale de chaque série de production. Aucune norme ISO ne l'exige. Nos données de retour terrain nous ont incités à l'ajouter.
8.2 Essais environnementaux
• Tests de chute de 1.2 à 1.5 mètre sur du béton — hauteur réaliste d'un seuil de porte ou d'un établi
• Cycles de température haute et basse : de -10 à 55 degrés Celsius avec vérification fonctionnelle aux deux extrêmes
• Essais de vibration sur une table à six axes simulant le sol d'un atelier et le transport de véhicules
• Vérification de l'intégrité du signal du bus CAN après vibration à l'oscilloscope : les oscillations après une contrainte mécanique constituent un mode de défaillance non détecté par les seuls tests fonctionnels.
8.3 Tests de production
Chaque carte est soumise à un test en circuit qui vérifie la présence des composants et l'intégrité des soudures. Un test fonctionnel vérifie chaque protocole de communication, chaque chemin d'E/S et la régulation de l'alimentation en fonction de la température. L'étalonnage de l'interface OBD à l'aide d'un simulateur d'ECU de référence confirme la synchronisation du protocole et les niveaux de signal avant l'assemblage final. Aucun appareil n'est expédié sans avoir réussi ces trois étapes. C'est en partie ce qui explique notre taux de retour terrain pour défauts de communication, qui est de seulement 0.3 %.
9. Fabrication et production de masse
9.1 Optimisation DFM
La conception pour la fabrication débute dès l'examen du schéma, et non après le routage. Pour chaque circuit intégré critique (émetteur-récepteur, microcontrôleur, gestion de l'alimentation), nous documentons un substitut qualifié avant la finalisation de la fabrication. Des problèmes de disponibilité des composants ont entraîné l'arrêt de deux programmes ODM en 2021 et 2022, faute de stratégies de substitution. Le choix de circuits intégrés à long cycle de vie permet d'éviter qu'un produit ne soit mis en production alors que son composant principal arrive en fin de vie dans les 18 mois suivants.
9.2 CMS et assemblage
Lignes SMT automatisées pour l'assemblage complet des composants en surface : aucun placement manuel sur les cartes de production. Soudage à la vague pour les connecteurs traversants lorsque nécessaire. La mise à jour finale du système et l'installation du logiciel font partie intégrante du flux de production et ne constituent pas une étape postérieure à l'assemblage. Chaque unité reçoit le firmware de production, la base de données véhicule et les paramètres d'étalonnage lors d'une opération contrôlée et enregistrée. La compatibilité avec les mises à jour OTA est vérifiée sur chaque unité avant sa sortie de ligne.
9.3 Assurance qualité
Chaque unité fait l'objet d'un contrôle fonctionnel à 100 %, sans échantillonnage. Un test de rodage consiste à soumettre chaque unité à une température élevée pendant une période définie afin de détecter les défaillances initiales avant expédition. La validation finale de la communication avec le véhicule connecte chaque unité à un simulateur d'ECU en temps réel et vérifie la lecture, l'effacement et les données en temps réel des codes défauts (DTC) sur tous les protocoles pris en charge.
Notre production de 120 000 unités, répartie sur 18 mois et trois lignes ODM, a maintenu un taux de retour pour défauts de communication de 0.3 %. Ce chiffre représente le résultat de ce processus.
10. Résultats du projet
10.1 Réalisations techniques
Communication stable avec le calculateur moteur sur plus de 95 % des modèles de véhicules testés grâce à un système de diagnostic avancé (et non pas seulement l'OBD-II standard). Temps de démarrage inférieur à 10 secondes, du démarrage à froid à l'état prêt pour le diagnostic. Lecture fiable des données CAN haut débit à 500 kbit/s et 1 Mbit/s sans perte d'images, conformément à la norme d'immunité au bruit ISO 11898.
Le taux de défaillance de communication lors des retours sur le terrain a chuté de 4.2 % à 0.3 % suite aux modifications apportées à la conception des circuits imprimés, aux améliorations de la protection contre les surtensions et aux mesures de sécurité du micrologiciel introduites après la défaillance du Sprinter de 2023. Sur 120 000 unités, cela représente une différence de 5 040 à 360 retours sous garantie.
10.2 Résultats du marché
Le scanner a été lancé en Amérique du Nord et en Europe, positionné comme un outil de diagnostic professionnel de milieu à haut de gamme. Le taux de réachat des distributeurs s'est amélioré après l'adoption par le client d'une communication transparente sur la couverture, grâce à la publication de la matrice de couverture optimisée par le constructeur plutôt qu'un pourcentage générique. L'évolutivité pour l'extension du diagnostic des véhicules électriques est intégrée à l'architecture matérielle, avec des connecteurs CAN FD et DoIP sur le circuit imprimé pour la prochaine révision du produit.
11. Véhicules électriques et capacité d'expansion future
11.1 Diagnostic des véhicules électriques
« Compatible avec les véhicules électriques » est l’expression la plus galvaudée du moment dans le domaine du diagnostic automobile. Mais concrètement, qu’est-ce que cela implique en termes de matériel ?
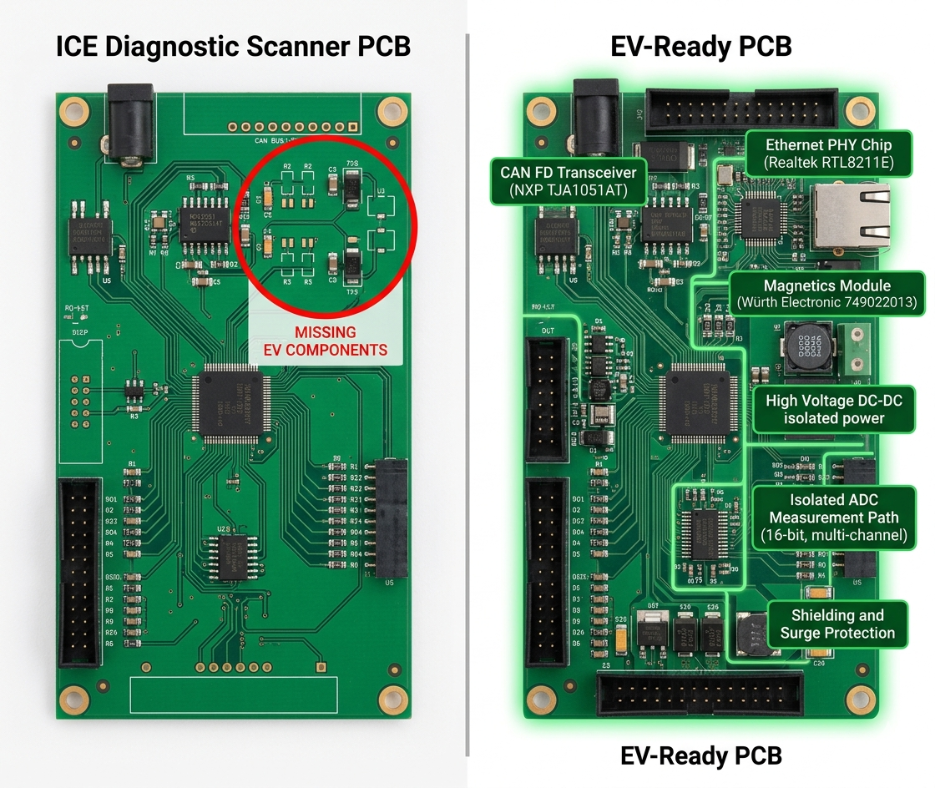
La surveillance des systèmes de gestion de batterie (BMS) des batteries fonctionnant entre 400 et 800 V nécessite des convertisseurs analogique-numérique (CAN) haute résolution supplémentaires et des voies de mesure isolées, contrairement aux outils de diagnostic thermiques standard. Les diagnostics des systèmes haute tension (défauts d'isolation HT, détection de soudure des contacteurs, signaux d'emballement thermique) utilisent des PID, des schémas d'accès de sécurité et des modes de défaillance différents de ceux des systèmes de diagnostic thermiques. Les calculateurs des véhicules électriques utilisent les mêmes commandes UDS que les moteurs thermiques, mais avec des structures de PID totalement différentes. Sans matériel de couche physique adapté, l'outil de diagnostic ne peut établir la connexion sur de nombreuses plateformes. Il ne s'agit pas d'un problème de base de données, mais d'un problème matériel.
• Surveillance de la tension, de la température et de l'équilibre des cellules du BMS
• Détection des défauts d'isolation haute tension et analyse de l'état des contacteurs
• Diagnostic du système de charge, y compris le protocole de communication EVSE
• Surveillance des signaux d'alerte précoce d'emballement thermique
11.2 Extension DoIP et OTA
La prise en charge complète du protocole DoIP (ISO 13400) requiert une couche physique Ethernet, des composants magnétiques et une pile TCP/IP sur le microcontrôleur. Cela représente un surcoût de 8 à 12 $ par unité, avant même la prise en compte du développement du firmware. La prise en charge du protocole CAN FD pour une communication de données à 5 Mbit/s ajoute 2 à 3 $ par unité. Le surcoût total de la nomenclature pour passer d'un simple scanner pour véhicules thermiques à un matériel compatible avec les véhicules électriques représente une augmentation de 25 à 40 %, soit 15 à 25 $ par appareil.
Lorsque des clients demandent l'ajout du diagnostic pour véhicules électriques, la discussion est claire : il ne s'agit pas d'une simple option logicielle. Cela implique six mois de travail sur une base de données spécifique au véhicule, en plus de modifications matérielles qui augmentent le coût unitaire de 15 à 25 $. Si vous achetez un scanner compatible avec les véhicules électriques, demandez la liste de contrôle matérielle DoIP et CAN FD ainsi qu'un rapport de validation signé pour au moins trois plateformes de véhicules électriques avant de signer le bon de commande.
« Exigez la liste de contrôle matérielle DoIP et CAN FD ainsi qu'un rapport de validation signé pour au moins trois plateformes de véhicules électriques. Pas un argument marketing. Un document signé. »
12. Pourquoi nous choisir pour le développement de vos dispositifs de diagnostic automobile ?
Nous ne mettons pas en avant la plus longue liste de fonctionnalités. Nous mettons en avant les données.
Notre expertise en conception de circuits imprimés dépasse le cadre de la compatibilité électromagnétique standard et intègre l'immunité aux transitoires spécifique aux véhicules. Cette immunité est validée sur des véhicules en fonctionnement, équipés de bancs de charge et d'injecteurs de bruit, et non par simple simulation. La défaillance du Mercedes Sprinter en 2023 a permis d'établir des règles de conception non standardisées par l'ISO, réduisant ainsi notre taux de retour pour défaillance de communication de 4.2 % à 0.3 %. Ce savoir-faire est désormais intégré à chacune de nos conceptions.
La conception de matériel de qualité automobile repose sur l'utilisation de composants conformes à la norme AEC-Q100, aux normes ISO 7637 et 16750, et sur des stratégies de remplacement des composants documentées avant la finalisation de la fabrication. La différence entre un scanner certifié et un scanner capable de supporter 200 000 cycles de connexion en conditions réelles d'atelier est imperceptible sur une simple fiche technique.
Le développement de logiciels embarqués couvre l'ensemble de la pile technologique : micrologiciel de protocole, gestion de la base de données du calculateur, infrastructure de mise à jour OTA et intégration au cloud. Nous considérons la fréquence des mises à jour de la base de données comme un livrable assorti d'un SLA : 45 jours maximum entre la sortie d'un nouveau modèle et la validation de la mise à jour.
Un service OEM et ODM complet garantit au client un produit fini, certifié et prêt à la commercialisation. Les certifications CE, FCC et RoHS sont prises en charge dans le cadre du programme. Production en série avec contrôle fonctionnel à 100 %. Validation complète de la communication avec le véhicule pour chaque unité avant expédition.
Nous expliquons clairement à nos clients les limites de notre outil : le contournement des passerelles de sécurité sur certaines plateformes de 2024 et ultérieures, le flux de travail hybride nécessaire à la programmation des calculateurs sur ces véhicules, et le coût réel de la compatibilité avec les véhicules électriques en termes de matériel. Cette transparence n'est pas un point faible dans notre processus de vente ; au contraire, nos données de commandes répétées le prouvent.
| 50Flotte de validation des véhicules | 45 joursSLA de mise à jour du modèle Max | 0.3 %Taux d'échec des communications sur le terrain | 100 %Inspection fonctionnelle par unité |
Toutes les données proviennent des registres de production internes, des journaux RMA et des données de validation sur le terrain, portant sur plus de 200 000 unités expédiées. Les identités des clients et des marques sont anonymisées conformément aux accords ODM.