1. Aperçu du projet
1.1 Contexte du client
Le client dirige une entreprise d'intégration de systèmes de sécurité et de services industriels. Sa clientèle comprend des sociétés de gestion immobilière, des exploitants de services publics, des installations pétrolières et gazières et de grandes usines. Il ne s'agit pas de petits sites, certains couvrant des centaines d'hectares. Certains fonctionnent 24 h/24, et un contrôle manqué à 3 h du matin représente bien plus qu'un simple problème administratif : c'est un véritable risque. Pendant des années, le personnel de patrouille a utilisé des lecteurs RFID pour valider les points de contrôle à des emplacements fixes, puis remplir des registres papier en fin de service. Le système ne prouvait qu'une chose : un agent avait atteint un point précis à une heure précise. Tout le reste – ce qu'il avait vu, l'état du matériel, les éventuels événements inhabituels entre les contrôles – n'était pas enregistré. Le client s'est donc tourné vers un système d'inspection intelligent.
1.2 Objectifs du projet
Le dispositif d'inspection intelligent devait effectuer plusieurs tâches simultanément et de manière fiable. Le positionnement GPS en temps réel en était la base. Sans connaître la position d'un travailleur à un instant donné, le reste du système reposait sur des suppositions. Outre la localisation, le client avait besoin de la capture de photos et de vidéos HD afin que les agents puissent documenter ce qu'ils voyaient réellement, et pas seulement leur présence sur les lieux.

La communication vocale instantanée était une priorité dès le départ. Les agents de sécurité ne sont pas à l'aise pour naviguer dans les menus de leur téléphone avec des gants, dans l'obscurité. Une communication radio instantanée, via un seul bouton : telle était l'exigence. Transmission de données 4G/LTE, batterie offrant une autonomie d'au moins 12 heures de travail, boîtier robuste certifié IP résistant aux chutes, à la poussière et à l'eau, et intégration parfaite avec une plateforme de gestion cloud : voilà le cahier des charges complet.
2. Défis industriels liés au développement des dispositifs d'inspection intelligents
2.1 Précision du positionnement
Le GPS extérieur est gérable. Le véritable problème réside dans le fait que les sites industriels ne sont pas des environnements exclusivement extérieurs. Ils mêlent cours ouvertes et entrepôts fermés, câbles souterrains, bâtiments de production à plusieurs étages et parcs de stockage de carburant entourés de structures métalliques qui dispersent les signaux satellites dans toutes les directions. Un appareil qui assure un suivi précis sur un parking mais perd sa position à l'intérieur d'une chaufferie ne résout pas le problème de fond.
Lisez aussi: Étude de cas sur les casques de sécurité intelligents
Dès le départ, les approches de positionnement hybrides, combinant GPS, Wi-Fi et balises Bluetooth Low Energy, ont été évaluées. Chaque technologie couvre les besoins spécifiques des autres. En contrepartie, la complexité accrue réside dans le matériel et le logiciel nécessaires à la fusion des données de localisation provenant de sources multiples.
2.2 Transmission de données en temps réel
Voici un scénario qui mérite réflexion. Un agent de sécurité photographie un raccord de tuyauterie fissuré à l'extrémité d'une installation. Le signal 4G est faible à cet endroit. La photo se télécharge partiellement, sans avertissement, et la salle de contrôle ne la voit jamais. Personne ne se rend compte que le rapport a été perdu. C'est en réalité pire que l'absence totale de photo, car cela crée une lacune dans les enregistrements, même si ceux-ci semblent complets.
Concevoir pour des réseaux instables implique d'intégrer au système une gestion des données fonctionnant hors ligne. Les photos, les enregistrements GPS et les notes d'incident sont mis en mémoire tampon localement en cas de coupure de connexion. Dès que le signal est rétabli, ils sont transférés avec leur horodatage d'origine précis. Le transfert à faible latence des données courantes et la livraison fiable des autres données constituent deux problèmes d'ingénierie distincts qui nécessitent chacun une solution.
2.3 Environnement industriel difficile
Sur un chantier, les appareils électroniques grand public ne durent qu'environ trois semaines avant de tomber en panne. Ce n'est pas une exagération. La poussière s'infiltre dans les ports. Les appareils tombent du tapis roulant sur le béton. Ils passent sans cesse d'une chambre froide à un environnement extérieur chaud. Les écrans tactiles se fissurent. Les boutons se corrodent. Rien de tout cela n'est acceptable pour un appareil que les ouvriers sont censés utiliser à chaque quart de travail pendant des années.
Résistance aux chutes d'au moins 1.5 mètre, protection totale contre la poussière et les infiltrations d'eau, et fonctionnement stable de -20 à 60 degrés Celsius : telles étaient les exigences physiques non négociables lors de la conception mécanique.
2.4 Contraintes de puissance et thermiques

L'utilisation simultanée du GPS, de la 4G et de l'appareil photo sur un smartphone consomme énormément de batterie. La plupart des smartphones grand public seraient déchargés en quatre heures avec une telle charge. Une équipe a besoin de douze heures. Cet écart de temps influence quasiment tous les choix d'architecture d'alimentation lors de la conception. Et lorsque les composants fonctionnent à plein régime dans un boîtier compact et étanche, la chaleur a du mal à s'évacuer. La gestion thermique et l'autonomie de la batterie sont donc étroitement liées.
3. Conception de l'architecture du système
3.1 Plateforme de traitement centrale
Le cœur de traitement repose sur un processeur ARM Cortex-A avec une version personnalisée d'Android. Le choix d'Android était motivé par des raisons pratiques, et non par une simple configuration par défaut. Il permet à l'équipe de développement d'applications de progresser rapidement sur la couche logicielle d'inspection sans attendre la stabilisation d'un système d'exploitation personnalisé. La plateforme dispose également d'un emplacement NPU optionnel dédié aux fonctionnalités d'analyse d'images par IA ; ainsi, les clients souhaitant ultérieurement intégrer des capacités de vision industrielle n'ont pas besoin d'un autre appareil d'inspection intelligent.
L'architecture de démarrage sécurisé a été intégrée dès la conception. Les appareils sur les sites industriels sont des cibles privilégiées pour la falsification du micrologiciel, et la sécurité des données qu'ils collectent est primordiale.
3.2 Module de positionnement
Ce dispositif d'inspection intelligent utilise simultanément quatre systèmes satellitaires. Cette utilisation de quatre systèmes lui permet de capter davantage de signaux satellites, ce qui rend le suivi de localisation plus rapide et plus précis, même lorsque de hauts bâtiments masquent la vue.
Le système utilise également la technologie GPS assistée. Cette technologie télécharge les données satellitaires du réseau, permettant ainsi à l'appareil de vous localiser en quelques secondes au lieu de plusieurs minutes. Pour suivre des objets à l'intérieur d'un bâtiment, un emplacement dédié permet d'ajouter facilement un module UWB.
Système à 3.3 caméras
Le module caméra offre une résolution de 8 à 16 mégapixels selon les besoins du déploiement. Il intègre l'autofocus, une amélioration de la qualité en basse lumière et, en option, la vision infrarouge pour les opérations nocturnes. Pourquoi la qualité de la caméra est-elle si importante lors d'une patrouille ? Une image floue et sous-exposée d'une fuite présumée ou d'un équipement endommagé est quasiment inutilisable lors d'un examen à distance. La caméra n'est pas un simple gadget : c'est le système de preuves.
3.4 Architecture de communication

La 4G LTE est le principal canal de transmission de données. Le Wi-Fi 5 est disponible lorsque l'appareil se trouve à portée du réseau de l'établissement, ce qui permet de réduire les coûts de données mobiles sur les campus bénéficiant d'une bonne couverture sans fil. Le Bluetooth 5.0 gère les accessoires et les données à courte portée. La fonction PTT (Push-To-Talk) via le réseau cellulaire permet aux agents de sécurité de communiquer par radio sans matériel supplémentaire. La technologie NFC assure le contrôle d'accès, remplaçant avantageusement les anciens systèmes de cartes RFID et préservant le processus de vérification habituel des rondes de contrôle.
4. Ingénierie des circuits imprimés et du matériel
4.1 Conception de circuits imprimés multicouches
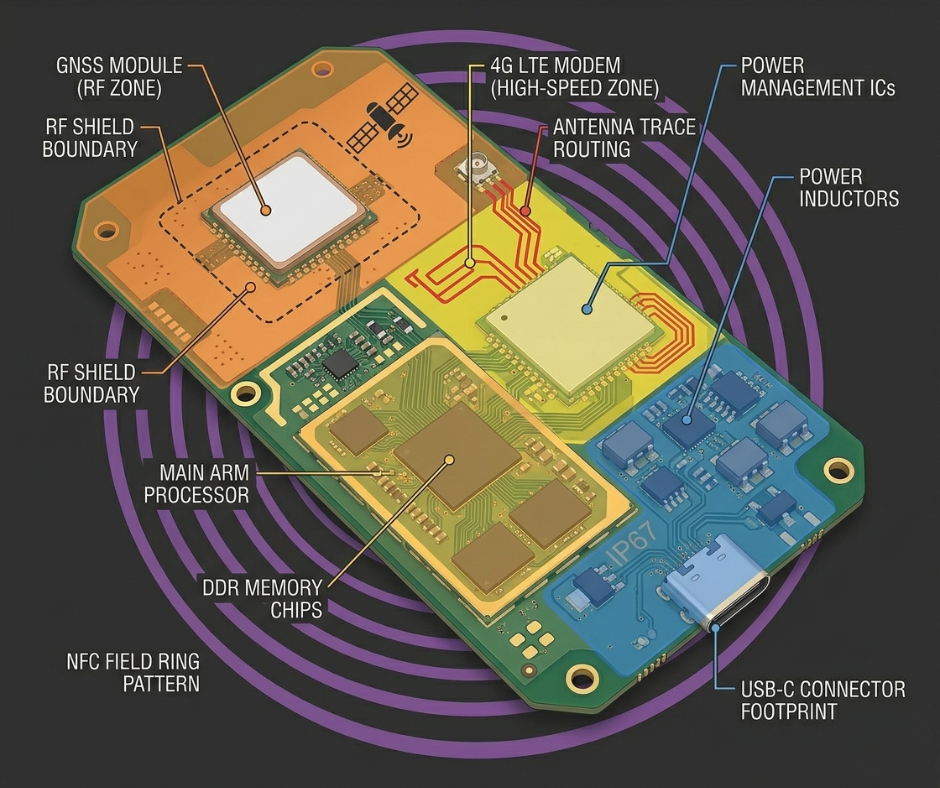
Ce circuit imprimé utilisait des cartes à six à huit couches. Ce nombre de couches ne sert pas uniquement à augmenter le nombre de pistes ; il vise aussi à garantir le bon fonctionnement des signaux RF. Les récepteurs GNSS et les modems LTE utilisent des bandes de fréquences où un mauvais routage des signaux peut engendrer des interférences subtiles. Un appareil ayant passé les tests en laboratoire peut néanmoins présenter une dégradation en conditions réelles si l'isolation RF a été négligée. Dès la première version, des plans de masse, des couches de routage RF dédiées et un blindage EMI autour des zones sensibles ont été intégrés à la conception.
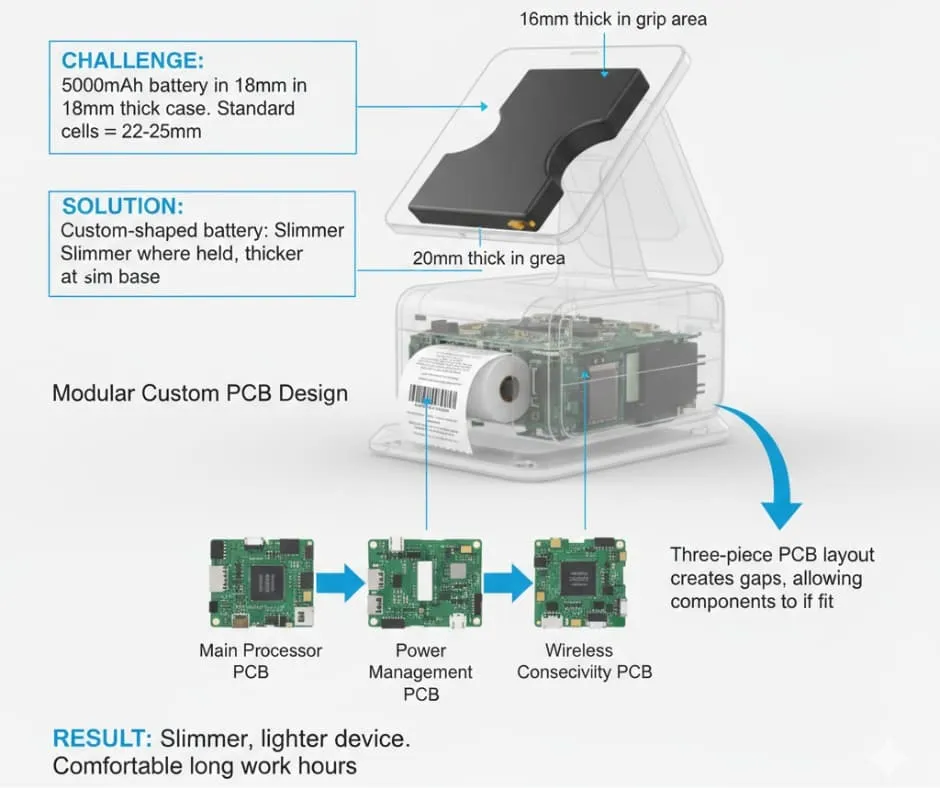
4.2 Système de gestion de l'alimentation
Les objectifs de capacité de la batterie variaient de 4 000 à 6 000 mAh. Cependant, la capacité brute ne fait pas tout. Le système de gestion de l'alimentation planifie l'activité des sous-systèmes en fonction des habitudes d'utilisation réelles. La fréquence d'interrogation du GPS diminue lorsque l'appareil détecte un mouvement minimal. L'écran s'assombrit en l'absence d'interaction. Le modem transmet les données par brèves impulsions au lieu de rester constamment actif, ce qui améliore l'autonomie de la batterie. Des puces de sécurité spécifiques protègent également la batterie contre la surcharge, la décharge excessive et la surchauffe. Grâce à la charge rapide USB-C, l'appareil d'inspection intelligent peut se recharger rapidement pendant une courte pause.
4.3 Structure matérielle robuste
La carte de circuit imprimé est montée sur un système antichoc à l'intérieur du châssis. Ce détail est crucial. Une chute sur du béton génère une forte impulsion mécanique qui traverse l'ensemble. Une carte montée de façon rigide transmet cette impulsion directement aux soudures et aux pastilles des composants, et un nombre suffisant de ces incidents provoque des défaillances qui ne sont pas immédiatement détectables. Un montage souple absorbe une partie de cette énergie avant qu'elle n'atteigne les composants électroniques. Associée à une structure métallique interne renforcée et à une étanchéité IP65/IP67 complète, la conception interne garantit une résistance optimale aux environnements de travail difficiles.
5. Intégration des logiciels et des plateformes
5.1 Système de flux de travail d'inspection
L'application gère l'attribution des tâches, le contrôle des points de passage, le suivi en temps réel des patrouilles et le signalement des incidents. Les agents visualisent leur itinéraire de patrouille sur une carte simplifiée. Lorsqu'un agent scanne un code QR, le système enregistre l'heure et sa position GPS. Ainsi, il vérifie que l'agent effectue correctement sa patrouille. Si l'agent est trop éloigné, le système signale une erreur lors du scan. Cela empêche les agents de falsifier un scan depuis un autre emplacement.
5.2 Gestion des images et des vidéos
Les photos et vidéos sont horodatées et géolocalisées au moment de la prise de vue, et non lors de leur envoi. Cette distinction est importante. Si un appareil met en mémoire tampon des fichiers multimédias pendant une interruption de connexion et les envoie ultérieurement, l'horodatage côté serveur basé sur l'heure d'envoi enregistrerait un lieu et une heure erronés. L'horodatage au moment de la prise de vue garantit des enregistrements précis, quelle que soit la date à laquelle les données arrivent dans le cloud. Le chiffrement des envois et l'intégration du stockage cloud sont des fonctionnalités standard.
5.3 Système de communication vocale
La fonction PTT (Push-To-Talk) permet aux opérateurs de se connecter instantanément à leur canal de groupe. Plus besoin de naviguer dans des menus ni de déverrouiller l'écran. Les groupes de superviseurs, les groupes par zone et les diffusions à l'échelle du site sont configurables. La fonction SOS, accessible par un bouton dédié, envoie une alerte à la salle de contrôle avec la position actuelle de l'opérateur et ouvre automatiquement un canal vocal.
5.4 Plateforme de gestion du backend
Le tableau de bord web affiche une carte interactive des patrouilles en cours, mise à jour en temps réel. L'historique des données permet aux superviseurs de consulter n'importe quel service passé. Les rapports sont exportables aux formats PDF ou Excel pour la documentation client, les audits ou les enquêtes sur les incidents. Aucun logiciel spécifique n'est requis : un simple navigateur suffit.
6. IA et fonctionnalités intelligentes (mise à niveau optionnelle)
6.1 Reconnaissance d'images par IA
La détection des risques pour la sécurité, la reconnaissance des anomalies des équipements et le contrôle de la conformité des EPI sont disponibles en option. Ces fonctionnalités s'exécutent soit directement sur l'appareil via le NPU, soit via le cloud, selon les exigences de connectivité et de latence. En réalité, les fonctionnalités d'IA apportent une réelle valeur ajoutée dans le bon contexte, mais une complexité inutile dans le mauvais. Un établissement confronté à un problème récurrent de détection de risques spécifiques est un bon candidat. Un programme de patrouille résidentiel standard, en revanche, ne l'est probablement pas.
6.2 Alertes de géorepérage
Les alertes de franchissement de zones réglementées et les notifications de points de contrôle manqués sont des fonctionnalités basées sur des règles et s'appuyant sur les données GPS déjà collectées par l'appareil. La génération automatique d'un résumé de service regroupe les informations relatives à la couverture des patrouilles, les enregistrements des points de contrôle et les rapports d'incidents dans un document unique en fin de service. Ces fonctionnalités ne nécessitent aucun capteur supplémentaire ni aucune modification matérielle.
7. Conception mécanique et industrielle
7.1 Conception robuste du boîtier
La coque est composée de deux matériaux : du polycarbonate (PC) et du TPU. Le PC lui confère sa robustesse, tandis que le TPU protège les coins en cas de chute. La version standard (IP65) est étanche à la poussière et à la pluie. Une version plus performante (IP67) est conçue pour les environnements très humides. Des joints en caoutchouc et des vis étanches sont utilisés sur chaque bouton et orifice pour une protection optimale contre l'eau.
7.2 Conception ergonomique

Les recherches menées sur le terrain auprès d'agents de sécurité en activité ont davantage influencé les choix ergonomiques que toute tendance en matière de design. L'utilisation à une main est possible grâce à l'emplacement des commandes, et non uniquement grâce à la légèreté de l'appareil. Le bouton PTT est physique, large et positionné de manière à ce que le pouce se pose naturellement. L'écran tactile est calibré pour une utilisation avec des gants, ce qui requiert des réglages de sensibilité capacitive différents de ceux d'un appareil grand public. La luminosité de l'écran assure une lisibilité optimale en extérieur, même en plein soleil.
7.3 Gestion thermique
Une feuille de graphite dissipe la chaleur dégagée par le processeur et le modem. Un cadre interne en aluminium dirige cette chaleur vers les zones du boîtier présentant une plus grande surface de dissipation passive. Ainsi, l'appareil reste chaud même après une utilisation prolongée, sans pour autant devenir inconfortable au toucher, et la fréquence du processeur n'est pas réduite pour gérer la température.
8. Tests et validation
8.1 Tests fonctionnels
La précision du GNSS est validée par rapport à un équipement de référence dans diverses conditions atmosphériques, et non uniquement en zone dégagée offrant une visibilité parfaite. Les tests de stabilité 4G sont réalisés dans des environnements à signal limité plutôt qu'en laboratoire. La résolution et la mise au point de la caméra sont vérifiées en cours de production sur des échantillons, en complément de la validation technique.
8.2 Essais environnementaux
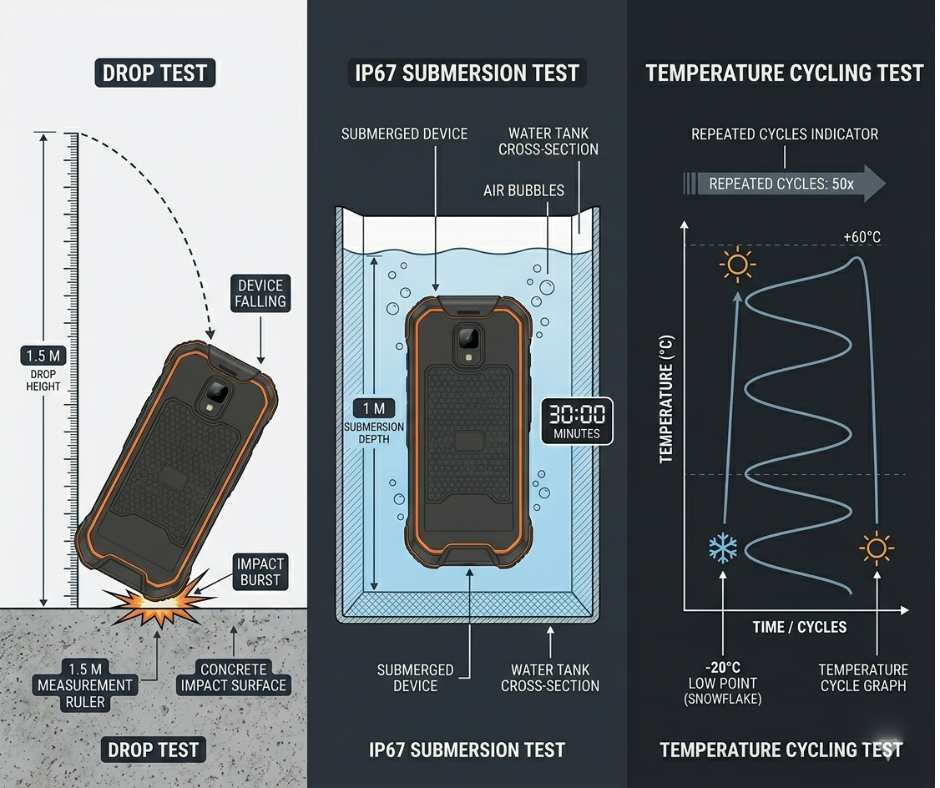
Nous testons les outils en les laissant tomber d'une hauteur de 1.5 mètre sur du béton et de l'acier. Nous les laissons tomber de différents côtés pour nous assurer qu'ils ne se cassent pas. Nous vérifions également qu'aucune poussière ni eau ne puisse pénétrer à l'intérieur.
Nous les testons dans des conditions de froid et de chaleur extrêmes. Les variations de température répétées permettent de vérifier la solidité des pièces. Ce test est plus exigeant pour l'outil que le simple maintien dans un environnement constamment chaud ou froid.
8.3 Tests de batterie et d'endurance
Des simulations complètes de quarts de travail de 12 à 15 heures sont exécutées selon des profils de charge de travail reflétant une utilisation réelle sur le terrain, et non une utilisation minimale optimale. La validation des cycles de charge couvre des centaines de cycles afin de confirmer le maintien de la capacité. Des tests de vieillissement poussent les batteries au-delà des conditions normales d'utilisation pour vérifier leur comportement en fin de vie.
9. Certification et conformité
Cet appareil d'inspection intelligent porte les marquages CE et FCC, nécessaires à son accès aux marchés européen et nord-américain. Il est conforme à la directive RoHS, qui couvre les exigences relatives aux substances réglementées. Les indices de protection IP65/IP67 sont testés et documentés ; ils ne sont pas auto-déclarés. La certification UN38.3 des batteries garantit le transport sécurisé des cellules lithium-ion, une exigence pratique pour l'expédition internationale de ces appareils.
10. Fabrication et production de masse
10.1 Stratégie de fabrication pour la fabrication (DFM) et des composants
La revue de conception pour la fabrication a été effectuée avant la finalisation de l'outillage. Des composants de qualité industrielle, à la disponibilité et à la durée de vie documentées, ont été privilégiés chaque fois que cela était possible. Des fournisseurs alternatifs ont été identifiés pour tout composant présentant des risques d'approvisionnement. Il ne s'agit pas d'une simple précaution, mais d'une gestion de programme essentielle pour un dispositif destiné à être produit en continu et à bénéficier d'un support technique sur le terrain pendant au moins cinq ans.
10.2 CMS et assemblage
L'assemblage SMT haute densité est réalisé en standard. Le processus d'assemblage étanche comprend des étapes supplémentaires absentes de la production d'électronique grand public : pose de joints, mise en place de joints d'étanchéité par compression, serrage contrôlé au couple et vérification de l'intégrité des joints avant la fermeture de l'unité. La mise à jour et l'étalonnage du firmware sont effectués pendant le processus de production, et non ultérieurement.
10.3 Contrôle de la qualité
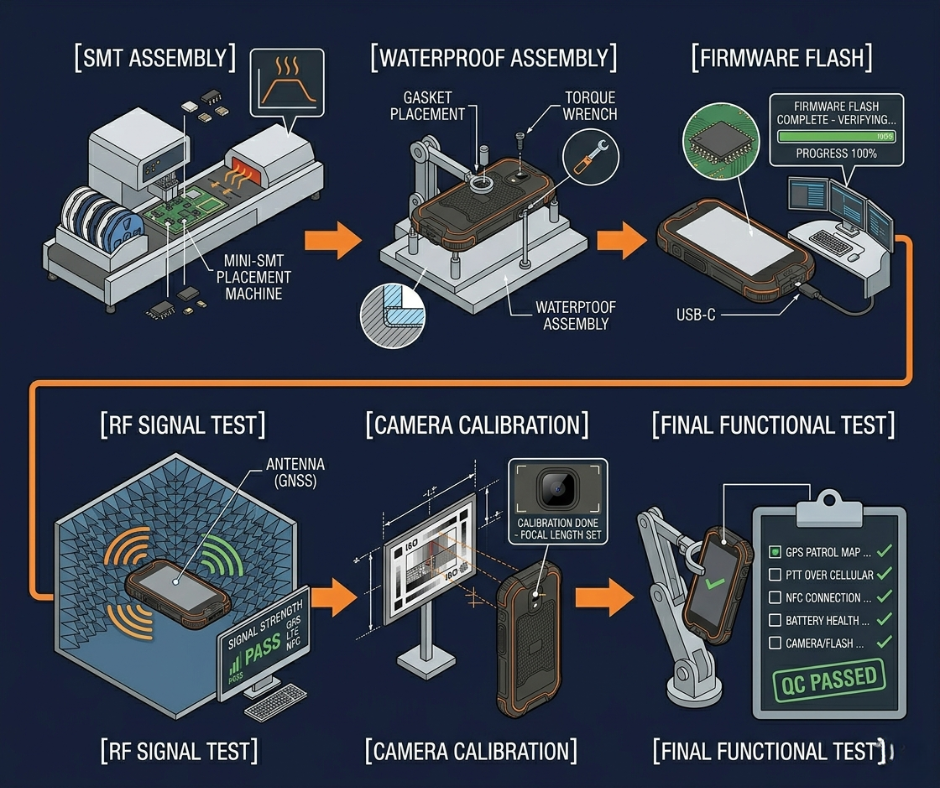
Chaque unité est soumise à des tests fonctionnels complets, couvrant la puissance du signal sans fil, le fonctionnement de la caméra, l'acquisition GPS, la fonction PTT et l'autonomie de la batterie. Notre objectif est qu'aucune unité défectueuse ne soit livrée au client. Détecter les défaillances en production est moins coûteux et moins dommageable que de les détecter après déploiement.
11. Résultats du projet
11.1 Réalisations techniques
L'autonomie moyenne des batteries lors des déploiements sur le terrain s'est établie à 15 heures en utilisation normale, permettant ainsi aux agents de terminer leur service avant que leurs appareils ne soient déchargés. Le positionnement GPS est resté stable en extérieur et dans les environnements semi-abrités où empruntent la plupart des itinéraires de patrouille. La qualité d'image HD a permis aux superviseurs et aux clients de disposer d'une documentation exploitable, contrairement aux photos floues et prises en basse lumière qui étaient jointes aux rapports d'incident.
11.2 Déploiement sur le marché
Les déploiements dans les secteurs de la gestion immobilière et de l'industrie ont permis de constater une réduction significative des erreurs de saisie manuelle. Les agents de sécurité ne pouvaient plus remplir leurs rapports de patrouille a posteriori, car le suivi GPS indiquait leurs déplacements réels. L'amélioration du suivi des patrouilles ne résultait pas d'un renforcement des contrôles de la direction, mais de la visibilité accrue des itinéraires de patrouille pour tous grâce aux données.
12. Capacité d'expansion future
Mise à niveau 5G 12.1
L'architecture de communication a été conçue en prévision de la migration vers la 5G. La diffusion vidéo en direct haute définition et l'assistance d'experts à distance en temps réel deviennent possibles grâce à la 5G, ce que la bande passante de la 4G ne permet pas facilement. Le passage à la 5G ne nécessite pas une refonte complète du matériel.
12.2 Intégration de la ville intelligente
Les dispositifs d'inspection industrielle génèrent en continu des données de localisation, d'événements et de capteurs. Ces données ont une valeur qui dépasse le cadre de la simple gestion des installations. L'intégration à des réseaux de capteurs IoT plus vastes et à des plateformes unifiées de gestion de villes ou de campus constitue une suite logique pour les opérateurs gérant des infrastructures à grande échelle.
13. Pourquoi nous choisir pour le développement de dispositifs intelligents industriels
Concevoir un terminal portable industriel robuste est un projet bien différent de la création d'une application grand public ou même d'un appareil d'inspection intelligent standard. Les compétences en ingénierie matérielle requises, notamment en matière de systèmes embarqués, de conception RF, de gestion de l'énergie, d'étanchéité mécanique et de contrôle thermique, sont très pointues. La moindre erreur dans l'un de ces domaines peut se traduire par des pannes sur le terrain, des mois après le déploiement, et s'avérer très coûteuse.
Notre équipe maîtrise l'ensemble de la chaîne de valeur pour de nombreux programmes d'appareils portables industriels : conception de circuits imprimés et RF, ingénierie de boîtiers robustes, intégration de plateformes IoT, programmes de fabrication OEM et ODM, du premier prototype à la montée en production. Si vous envisagez un appareil d'inspection intelligent ou un terminal de patrouille industrielle, nous préférons discuter de vos besoins précis dès le départ plutôt que d'examiner un cahier des charges qui fige des choix susceptibles de poser problème ultérieurement.
Contactez notre équipe d'ingénieurs pour discuter de votre solution matérielle d'inspection personnalisée.