CASO DE ESTUDIO
Un estudio de caso técnico sobre un escáner de diagnóstico automotriz, basado en más de 200 000 unidades enviadas a través de múltiples líneas de fabricación de diseño original (ODM), que abarca decisiones de arquitectura reales, una falla en el campo que reescribió nuestras reglas de PCB y los datos que explican qué es lo que realmente impulsa las devoluciones.
| 200k+Unidades enviadas | 4.2% → 0.3%Tasa de fallos en las comunicaciones | 68%RMA: Faltan datos del fabricante original | 40-60%Cobertura real mejorada |
1. Descripción general del proyecto
1.1 Antecedentes del cliente
El cliente era una marca de equipos para el servicio automotriz con una línea consolidada de herramientas OBD de nivel básico (adaptadores basados en ELM327 y lectores de códigos básicos). Querían dar un salto cualitativo hacia escáneres multisistema profesionales.
Mercado objetivo: talleres de reparación independientes, operaciones de mantenimiento de flotas y talleres de servicio de concesionarios. Los mercados considerados desde el primer día fueron Norteamérica y Europa, con Asia como objetivo en una segunda fase.

La brecha que intentaban cerrar era real. Las herramientas básicas leen códigos genéricos del sistema de propulsión. Los talleres profesionales necesitan ABS, SRS, transmisión, TPMS, controles bidireccionales y datos de la ECU en tiempo real para docenas de marcas. Ese salto no es una actualización de firmware. Es un programa de hardware y software completamente diferente.
Lea también Estudio de caso de una tableta robusta
1.2 Objetivos del proyecto
• Cumplimiento total con OBD-II como mínimo, no como máximo.
• Compatibilidad con múltiples protocolos CAN, LIN y FlexRay
• Análisis de datos de la ECU en tiempo real con baja latencia.
• Conectividad inalámbrica para sincronización en la nube y diagnóstico remoto.
• Durabilidad de grado industrial para entornos de taller.
• Diseño listo para la producción y aprobado para la certificación global.
• Ruta de actualización clara para el diagnóstico de vehículos eléctricos sin necesidad de un rediseño completo del hardware.
2. Desafíos de la industria en el desarrollo de herramientas de diagnóstico automotriz
2.1 Compatibilidad multiprotocolo
La afirmación de que es compatible con más del 95 % de los vehículos aparece en todas las cajas de escáneres del mercado. Tras distribuir más de 200 000 unidades, entre clones del ELM327 y tabletas multiprotocolo completas, podemos decirles exactamente qué oculta esa cifra.
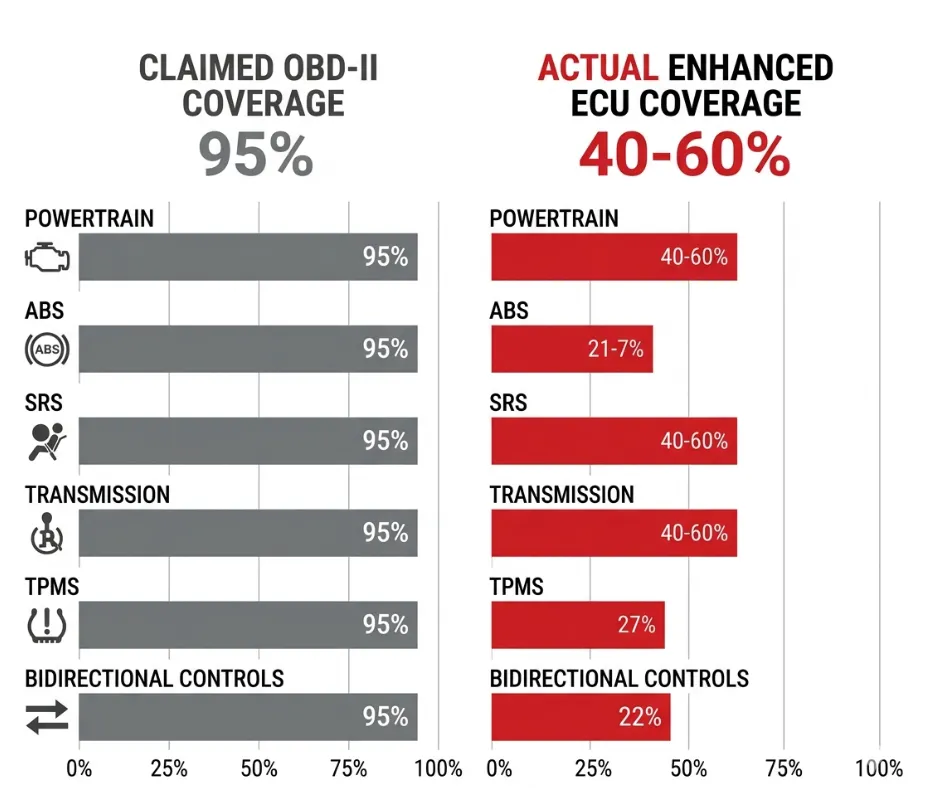
Cubre únicamente el cumplimiento básico de la normativa OBD-II: modos SAE J1979 e ISO 15031 del 01 al 0A en cinco protocolos heredados: ISO 9141-2, ISO 14230-4 KWP2000, SAE J1850 PWM y VPW, e ISO 15765-4 CAN a 250 y 500 kbps. Esto significa que el dispositivo lee los PID genéricos del tren motriz, el estado del MIL y los datos de cuadro congelado en cualquier vehículo estadounidense fabricado a partir de 1996 que cumpla con el requisito legal mínimo.
Lo que no cubre: PID definidos por el fabricante, acceso a módulos ABS/SRS/transmisión/TPMS, controles bidireccionales, adaptaciones o claves de acceso de seguridad. Los vehículos posteriores a 2018 que utilizan UDS en CAN o CAN FD amplían aún más la brecha. Cuando realizamos nuestra propia prueba con una flota de 50 vehículos, los escáneres que afirmaban tener una compatibilidad básica del 95 % solo alcanzaron un promedio del 40 al 60 % en datos mejorados para vehículos que no son USDM.
| Los ingenieros de compras de métricas deberían exigir: una matriz de cobertura detallada, mejorada por el fabricante, en Excel, desglosada por marca, modelo y año, que muestre los códigos de diagnóstico de fallas (DTC) mejorados compatibles por ECU, el estado de CAN FD y DoIP, la capacidad de transferencia J2534 y la frecuencia de actualización de la base de datos. Todo lo demás es mera estrategia de marketing. |
2.2 Estabilidad de la comunicación de la ECU
Los entornos eléctricos de los vehículos son hostiles. Los inyectores diésel common-rail, el ruido de conmutación del alternador y las fluctuaciones de carga durante el arranque del motor generan transitorios que las pruebas en banco jamás detectarán. El voltaje en el puerto OBD oscila entre 9 V y 36 V, dependiendo del vehículo, el estado de carga y los demás dispositivos conectados al bus. La protección contra polaridad inversa no es opcional; está incluida en la garantía.
Aprendimos esto por las malas. Un proyecto ODM de 2023 que utilizaba un SoC GD32F103 con un transceptor CAN TJA1050 pasó el 100 por ciento de las pruebas de banco: diagramas de ojo limpios, sin pérdida de paquetes a 500 kbps. El primer fallo en campo se produjo en un taller europeo en una Mercedes Sprinter diésel de 2019. La unidad se desconectó del bus intermitentemente, arrojó códigos de pérdida de comunicación U0100 y borrados de DTC corruptos. Causa raíz: diodos TVS de tamaño insuficiente y bobinas de choque de modo común faltantes en CANH y CANL. Transitorios de voltaje según ISO 7637-2 Pulso 3a y 3b —hasta +/-150 V durante el arranque del motor— acoplados directamente a través del conector OBD. El transceptor sobrevivió a las pruebas de banco y falló en campo después de aproximadamente 200 horas acumuladas.
2.3 Complejidad de la base de datos de software
Nuestros datos de RMA de 120 000 unidades durante 18 meses muestran que el 68 % de las devoluciones se registran como «no funciona en mi XYZ de 2024», incluso cuando el hardware admite los protocolos correctos. Faltaba la entrada de la base de datos específica del fabricante o la negociación de la clave de seguridad falló silenciosamente. Las unidades con actualizaciones de base de datos OTA poco frecuentes muestran tasas de devolución de entre el 18 % y el 22 % cuando se lanza un nuevo modelo. Este es un problema comercial, no de hardware.
2.4 Entorno de taller exigente
Los mecánicos no tratan con delicadeza las tabletas de diagnóstico. Dejan los escáneres enchufados durante las pruebas del alternador, los ciclos de encendido y los arranques con cables. Las herramientas se caen de los umbrales de las puertas de los vehículos, se cubren de aceite y se dejan en furgonetas frías durante la noche. El rango de funcionamiento de -10 a 55 grados Celsius no es un valor de la hoja de datos, sino el rango real que un escáner detecta entre una mañana de enero en un estacionamiento de Minnesota y el compartimento del motor en pleno verano de Texas.
3. Diseño de la arquitectura del sistema
3.1 Plataforma de procesamiento central
El procesador principal de la aplicación es un ARM Cortex-A que ejecuta Android o Linux embebido. Android destaca por su velocidad de desarrollo de interfaz de usuario y la madurez de su ecosistema OTA. Linux ofrece un entorno más limpio para rutas de diagnóstico sensibles a la latencia. Un microcontrolador dedicado gestiona la capa de control de comunicación de forma independiente; mantener el procesador de la aplicación fuera del bus del vehículo reduce la latencia, mejora el aislamiento de errores y evita que un fallo de software interrumpa las sesiones activas de la ECU. El tiempo de arranque objetivo era inferior a 10 segundos desde el encendido en frío hasta el estado listo para el diagnóstico.
3.2 Interfaz de comunicación del vehículo
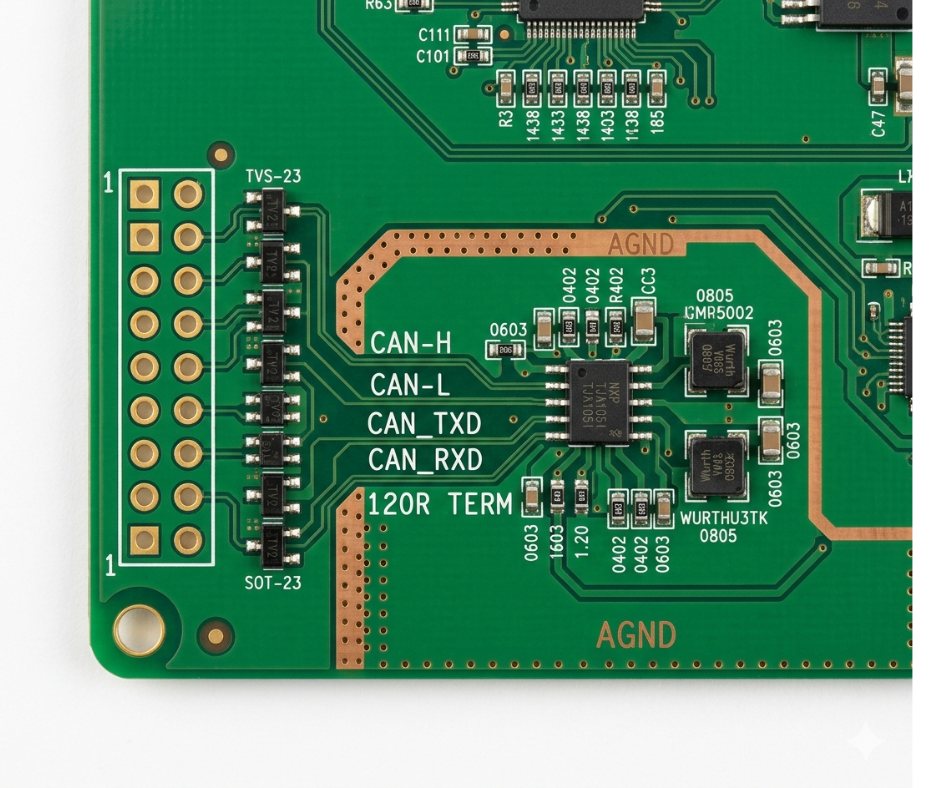
El conector OBD-II de 16 pines es el punto de entrada, pero la capa física subyacente es donde fallan la mayoría de los diseños. La arquitectura utiliza transceptores CAN de alta y baja velocidad, un circuito integrado controlador de línea K y línea L adecuado (no transistores discretos), un transceptor LIN y DoIP opcional a través de Ethernet para plataformas posteriores a 2020.
La elección del controlador de la línea K es más importante de lo que parece. Las implementaciones discretas económicas carecen de la tolerancia a 12 V, el control de velocidad de conmutación y el apagado por sobretemperatura de un circuito integrado dedicado como el L9637. En las ECU asiáticas y europeas más antiguas que elevan la tensión a 12 V durante la inicialización, la diferencia se manifiesta como comunicaciones intermitentes que son prácticamente imposibles de depurar en campo. La compatibilidad con DoIP requiere un PHY Ethernet, componentes magnéticos y una pila TCP/IP en el microcontrolador, lo que supone un aumento de entre 8 y 12 dólares en la lista de materiales antes de tener en cuenta la complejidad del firmware. No se trata de una simple opción de software.
3.3 conectividad inalámbrica
• WiFi 5 y 6 para sincronización de bases de datos de alta velocidad y registro de sesiones en la nube.
• Bluetooth 5.0 para emparejamiento con PC de taller y visualización remota
• Módulo 4G LTE opcional para diagnósticos en la nube desde vehículos en funcionamiento.
• El módulo LTE también admite asistencia técnica remota con intercambio de flujo de datos en tiempo real.
3.4 Almacenamiento y seguridad
Almacenamiento eMMC de 32 a 128 GB, según la versión. La base de datos de vehículos, con cobertura completa para fabricantes de equipos originales (OEM) de EE. UU., la UE y Asia, ocupa más de 20 GB antes de incluir registros y sesiones. La arquitectura de actualización segura del firmware utiliza paquetes de actualización firmados, una cadena de arranque verificada y canales OTA cifrados. La autenticación de usuario y los canales de comunicación cifrados son requisitos básicos para cualquier herramienta profesional destinada a flotas o concesionarios.
4. Ingeniería de PCB y hardware
4.1 Diseño de PCB multicapa
El fallo de la Mercedes Sprinter en 2023 reescribió nuestras normas de diseño de PCB. El análisis posterior al fallo reveló oscilaciones en las líneas CAN que superaban los 2 Vpp —una violación directa de la norma ISO 11898-2— causadas por un filtrado de modo común inadecuado y una separación deficiente del plano de tierra. Optamos por una arquitectura de 6 a 8 capas con un plano de tierra analógico dedicado bajo la sección del transceptor. Ninguna pista digital cruza el área del bus CAN. Se realizó un empalme de vías cada 5 mm alrededor de la sección analógica. El diseño EMI es una restricción de primera pasada, no un elemento de auditoría posterior al diseño.
Componentes de grado automotriz en todo el circuito: rangos de temperatura extendidos, certificación AEC-Q100 cuando corresponda, selección de circuitos integrados de larga duración con estrategia de sustitución documentada antes del diseño. La sección de la capa física utiliza un front-end ASIC de protocolo dedicado con lógica de terminación y supresión de pulsos programable.
4.2 Diseño de la gestión de energía
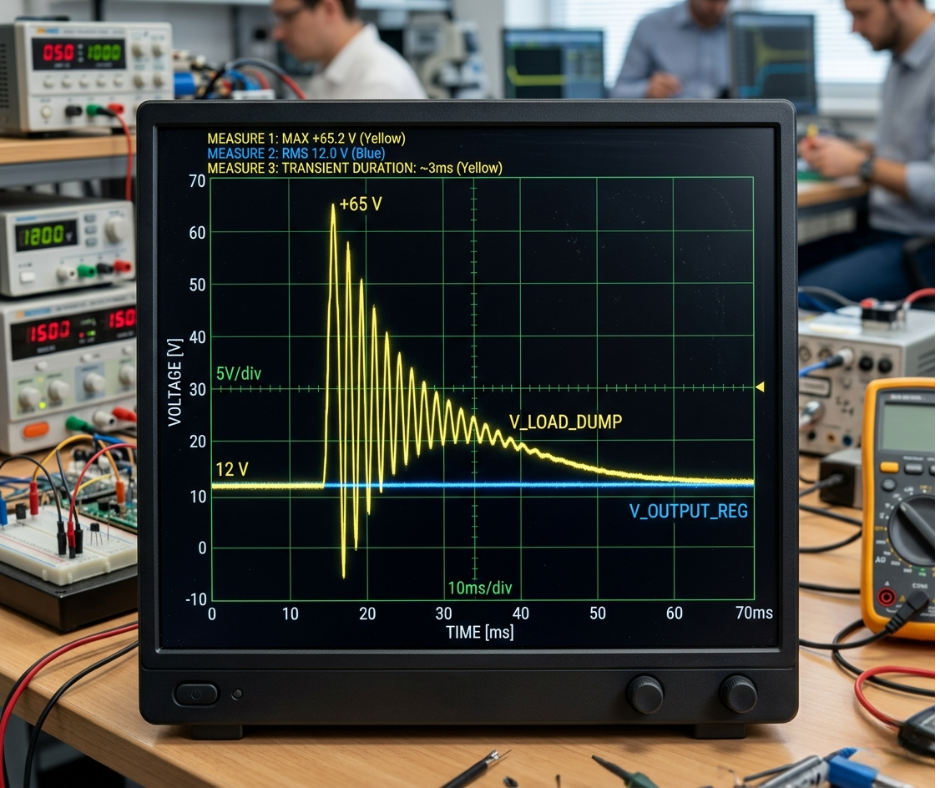
La protección contra sobretensiones de entrada cubre todo el rango de voltaje del vehículo, de 9 V a 36 V. La protección contra sobretensiones transitorias gestiona la desconexión de la batería de un alternador en funcionamiento, un evento que genera picos superiores a 60 V que dañan los circuitos no protegidos. Los diodos TVS ahora son matrices bidireccionales con certificación ISO 7637-3, en lugar de los componentes P6KE6.8A que fallaron en el proyecto Sprinter. Las versiones portátiles incorporan un sistema de gestión de batería para un funcionamiento inalámbrico durante las inspecciones del vehículo.
4.3 Protección contra descargas electrostáticas y transitorios
Cada pin OBD cuenta con protección TVS bidireccional homologada según IEC 61000-4-2 ESD, ferritas en serie y filtrado de modo común de 100 nF + 100 pF. Cumple con la norma ISO 7637. La especificación de protección que utilizamos es más exigente, ya que las condiciones reales de taller superan las de los modelos estándar.
5. Software y funcionalidad de diagnóstico
5.1 Características de diagnóstico principales
• Lee y borra los códigos de diagnóstico de avería (DTC) en todas las ECU compatibles, no solo en las del tren motriz.
• Monitorización de flujos de datos en tiempo real con selección de PID configurable y representación gráfica.
• Captura de datos de fotograma congelado en condiciones de fallo
• Estado de preparación del monitor para las pruebas de emisiones
• Pruebas del sensor de O2 y prueba de fugas del sistema EVAP según el modo 08 del OBD-II
Estas son las características exigidas por ley. Todos los escáneres del mercado las incluyen. La cuestión no es si existen, sino cuán fiables son en toda la cobertura de vehículos.
5.2 funciones avanzadas
Codificación y programación de la ECU para plataformas compatibles, con una importante salvedad. La omisión completa del protocolo de seguridad no está disponible en todas las plataformas de vehículos de lujo y eléctricos posteriores a 2024. Algunos módulos específicos de Mercedes, BMW y Tesla utilizan seguridad basada en código variable o certificados que no podemos descifrar. Esto es intencional. Recomendamos a nuestros clientes que utilicen el escáner como herramienta de diagnóstico y servicio, no como sustituto de un dispositivo PASSTHRU del concesionario cuando se requiere la programación de la ECU.
Para el 95 % del trabajo diario en el taller, el escáner es suficiente. Para el 5 % restante, el flujo de trabajo adecuado es nuestra herramienta de diagnóstico, junto con la transferencia J2534 al software del fabricante. Esta transparencia ha incrementado los pedidos recurrentes de los distribuidores, ya que dejan de recibir llamadas de quejas por afirmaciones de "acceso total" que no se cumplen en la práctica.
• Reinicio del TPMS y programación de sensores
• Diagnóstico de ABS y SRS con datos de sensores en tiempo real
• Restablecimientos de servicio: vida útil del aceite, desgaste de las pastillas de freno, registro de la batería
• Programación clave donde la seguridad del fabricante lo permita.
5.3 Integración en la nube
El diagnóstico remoto mediante sesiones registradas en la nube permite a un técnico superior revisar datos en tiempo real e historial de fallos desde cualquier lugar. Generación de informes de vehículos en formato PDF para la documentación de servicio. Una base de datos de soporte técnico en línea vinculada a la identificación del vehículo reduce el tiempo de diagnóstico en plataformas desconocidas. Integración con el panel de control de gestión de flotas disponible para operadores con más de 10 vehículos.
“El 68 % de nuestras devoluciones de mercancía en los últimos 18 meses se registraron como ‘no funciona en mi vehículo de 2024’, no como un fallo de hardware. Faltaba la entrada en la base de datos o la negociación de la clave de seguridad falló silenciosamente.”
6. Diseño Mecánico e Industrial
6.1 Diseño de la carcasa
IP54 como especificación básica, IP65 para la gama premium. Revestimiento de goma en las cuatro esquinas y la superficie posterior: no es estético, sino funcional. Las caídas desde los umbrales de las puertas de los vehículos y los bordes de los bancos de trabajo son el modo de fallo físico más común en las devoluciones de campo. Un marco interno amortiguador aísla el conjunto de PCB de los impactos de la carcasa. La carcasa del conector OBD está reforzada por separado porque la tensión del conector debida al peso del cable es un modo de fallo a largo plazo que se manifiesta después de más de 6,000 ciclos de conexión.

6.2 Diseño de la interfaz de usuario
Pantalla táctil capacitiva de siete a diez pulgadas, según el modelo. Sensibilidad táctil optimizada para usar con guantes: esta configuración de software suele omitirse y se nota de inmediato en los comentarios de los mecánicos. Los mecánicos usan guantes de nitrilo constantemente. Un escáner que requiere el uso de los dedos se descarta en una semana. Los botones físicos de acceso directo para las cuatro funciones más comunes reducen la dependencia de la pantalla táctil para el uso con una sola mano.
6.3 Gestión térmica
Las carcasas selladas no admiten refrigeración activa. El diseño térmico se basa en un disipador de calor interno de aluminio, unido al procesador y acoplado al panel trasero de la carcasa, que actúa como radiador pasivo. El objetivo de diseño era lograr una estabilidad de funcionamiento continua durante un turno de 8 horas. La meta: mantener el máximo rendimiento a una temperatura ambiente de 55 grados Celsius, lo que permite su uso cerca del compartimento del motor.
7. Cumplimiento y Certificación
7.1 Normas de la industria automotriz
La norma ISO 7637 cubre la protección contra transitorios en las líneas de alimentación y la interfaz OBD. Sin embargo, esta norma establece un límite inferior, no un límite superior. La falla de la Mercedes Sprinter se debió a los transitorios Pulse 3a y 3b que define la norma ISO 7637-2, y que nuestro diseño original subestimó en un entorno vehicular real con alta interferencia electromagnética (EMI). La norma ISO 16750 cubre las cargas ambientales y eléctricas de los componentes del vehículo. Nuestras especificaciones de diseño interno superan estas normas, específicamente en lo que respecta a la protección contra sobretensiones transitorias (TVS) y el filtrado de modo común.
• ISO 7637 — Inmunidad a transitorios y pulsos, protección de la línea de suministro
• ISO 16750: requisitos ambientales y eléctricos para componentes de vehículos
• SAE J2534-1 y J2534-2: cumplimiento de la normativa para la integración de software OEM.
7.2 Certificaciones globales
• Marcado CE: compatibilidad electromagnética y seguridad eléctrica para el mercado europeo.
• Autorización de la FCC: operación inalámbrica en Norteamérica
• Cumplimiento de la directiva RoHS: restricciones sobre sustancias peligrosas para los mercados de la UE y Asia.
• Evaluación REACH: según el contenido químico específico cuando sea necesario.
Todas las certificaciones se gestionan como parte del programa ODM. El cliente recibe un producto totalmente certificado y listo para su comercialización.
8. Pruebas y Validación
8.1 Pruebas funcionales
La validación de vehículos multimarca se realiza en nuestra flota de 50 vehículos, que se actualiza trimestralmente para incluir los nuevos modelos. La flota abarca marcas estadounidenses, europeas y asiáticas desde 1996 hasta la actualidad. Las pruebas de estabilidad de la comunicación de la ECU van más allá de la verificación del protocolo: realizamos pruebas bajo ruido eléctrico activo, durante el arranque del motor y con otras cargas de alta corriente funcionando simultáneamente.
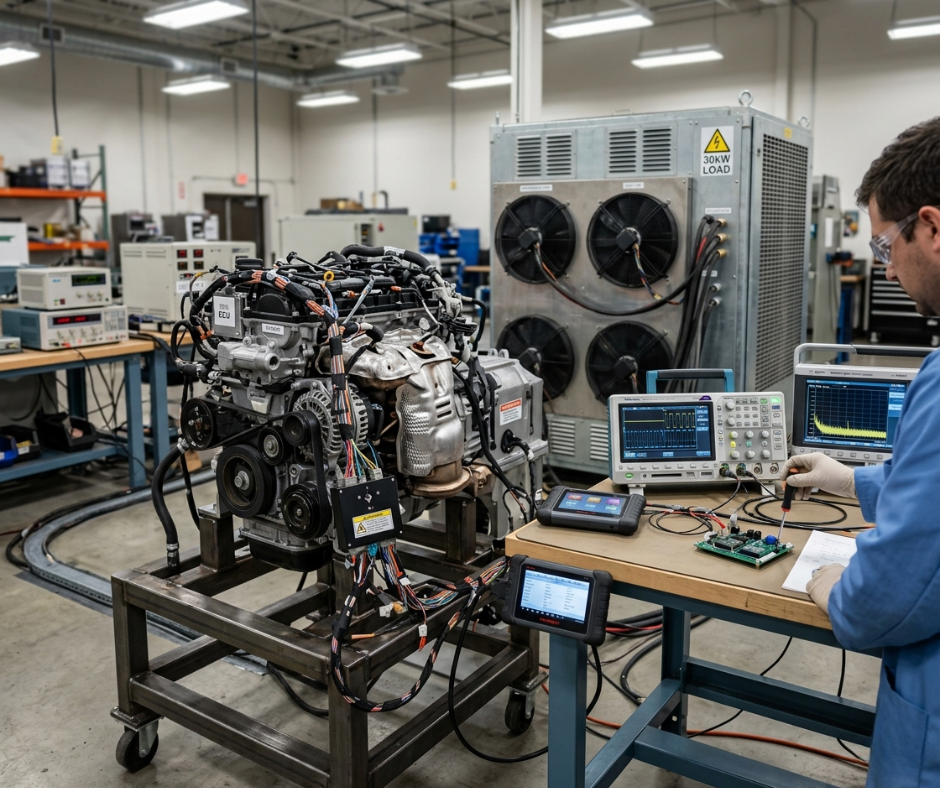
Las pruebas con vehículo en bucle en un motor diésel en marcha con un banco de carga de 30 kW y un inyector de ruido de chispa son ahora obligatorias antes de la aprobación final de cada lote de producción. Ninguna norma ISO lo exige. Los datos de campo nos indicaron que debíamos añadirlo.
8.2 Pruebas ambientales
• Prueba de caída desde 1.2 a 1.5 metros sobre hormigón: altura realista de un umbral de puerta o banco de trabajo.
• Ciclos de alta y baja temperatura: de -10 a 55 grados Celsius con verificación funcional en ambos extremos.
• Pruebas de vibración en una mesa de seis ejes que simula el suelo del taller y el transporte de vehículos.
• Verificación de la integridad de la señal del bus CAN mediante osciloscopio después de la vibración: el zumbido después del estrés mecánico es un modo de falla que las pruebas funcionales por sí solas no detectan.
8.3 Pruebas de producción
Las pruebas en circuito de cada placa verifican la cantidad de componentes y la integridad de las soldaduras. Las pruebas funcionales del circuito comprueban cada protocolo de comunicación, cada ruta de entrada/salida y la regulación de la fuente de alimentación a temperatura controlada. La calibración de la interfaz OBD con un simulador de ECU de referencia confirma la sincronización del protocolo y los niveles de señal antes del ensamblaje final. Ninguna unidad se envía sin haber superado las tres etapas. Esto explica en parte por qué nuestra tasa de devoluciones por fallas de comunicación es del 0.3 %.
9. Fabricación y producción en masa
9.1 Optimización de DFM
El diseño para la fabricación comienza con la revisión del esquema, no después del diseño físico. Para cada circuito integrado crítico del diseño (transceptor, MCU, gestión de energía), documentamos un sustituto cualificado antes de la fabricación. Los problemas de disponibilidad de componentes provocaron el fracaso de dos programas ODM en 2021 y 2022 que no contaban con estrategias de sustitución. La selección de circuitos integrados de ciclo de vida largo evita que un producto entre en producción y el componente principal quede obsoleto en 18 meses.
9.2 Montaje superficial y ensamblaje
Líneas SMT automatizadas para todo el ensamblaje de componentes de montaje superficial: sin manipulación manual de las placas de producción. Soldadura por ola para conectores pasantes cuando sea necesario. La programación final del sistema y la instalación del software forman parte del flujo de la línea de producción, no son pasos posteriores al ensamblaje. Cada unidad recibe el firmware de producción, la base de datos del vehículo y los parámetros de calibración como una operación controlada y registrada. La capacidad de actualización OTA se verifica en cada unidad antes de que salga de la línea.
9.3 Garantía de calidad
Inspección funcional completa de cada unidad (sin muestreo). Las pruebas de rodaje someten cada unidad a temperaturas elevadas durante un período determinado para detectar fallos prematuramente antes del envío. La validación final de la comunicación con el vehículo conecta cada unidad a un simulador de ECU en tiempo real y verifica la lectura, el borrado y los datos en tiempo real de los códigos de diagnóstico de avería (DTC) en todos los protocolos compatibles.
Nuestra producción de 120 000 unidades a lo largo de 18 meses y tres líneas ODM mantuvo una tasa de devolución por fallos de comunicación del 0.3 por ciento. Ese número es el resultado de este proceso.
10. Resultados del proyecto
10.1 Logros técnicos
Comunicación estable con la ECU en más del 95 % de los modelos de vehículos probados con diagnósticos avanzados, no solo con OBD-II genérico. Tiempo de arranque inferior a 10 segundos desde el arranque en frío hasta la disponibilidad para diagnóstico. Lectura fiable de datos CAN de alta velocidad a 500 kbps y 1 Mbps sin pérdida de tramas, conforme a la norma ISO 11898 de inmunidad al ruido.
La tasa de fallos de comunicación en las devoluciones de campo se redujo del 4.2 % al 0.3 % tras los cambios en el diseño de la placa de circuito impreso, las mejoras en la protección contra transitorios y las medidas de seguridad del firmware implementadas después del fallo de la Sprinter de 2023. En 120 000 unidades, esto supone una diferencia entre 5,040 devoluciones en garantía y 360.
10.2 Resultados del mercado
El escáner se lanzó en Norteamérica y Europa, posicionándose como una herramienta de diagnóstico profesional de gama media-alta. La tasa de pedidos repetidos del distribuidor mejoró después de que el cliente adoptara una comunicación de cobertura transparente, publicando la matriz de cobertura mejorada del fabricante en lugar de un porcentaje genérico. La escalabilidad para la expansión del diagnóstico de vehículos eléctricos está integrada en la arquitectura del hardware, con huellas CAN FD y DoIP en la placa de circuito impreso para la próxima revisión del producto.
11. Vehículos eléctricos y capacidad de expansión futura
11.1 Diagnóstico de vehículos eléctricos
"Preparado para vehículos eléctricos" es la frase más usada en el diagnóstico automotriz actualmente. Entonces, ¿qué requisitos de hardware implica realmente?
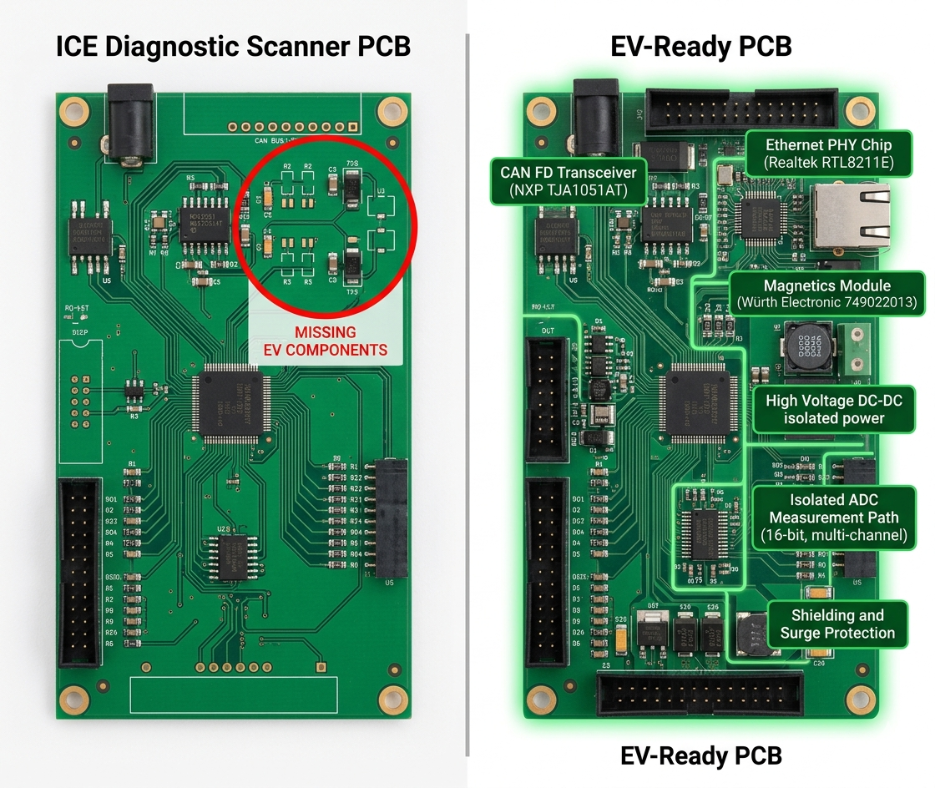
La monitorización del BMS en baterías con tensiones de entre 400 y 800 V requiere convertidores analógico-digitales (ADC) de alta resolución y rutas de medición aisladas que un escáner ICE estándar no incluye. El diagnóstico de sistemas de alta tensión (fallas de aislamiento de alta tensión, detección de soldadura de contactores, señales de sobrecalentamiento) utiliza PID, esquemas de acceso de seguridad y modos de fallo diferentes a los del manual de diagnóstico ICE. Las ECU de vehículos eléctricos utilizan los mismos comandos UDS que ICE, pero con estructuras PID completamente diferentes. Sin el hardware de capa física compatible, el escáner no puede establecer la conexión en muchas plataformas. Esto no es un problema de la base de datos, sino de hardware.
• Monitorización del voltaje, la temperatura y el equilibrio de las celdas del BMS
• Detección de fallas de aislamiento de alta tensión y análisis del estado del contactor
• Diagnóstico del sistema de carga, incluido el protocolo de comunicación del EVSE.
• Monitoreo de señales de alerta temprana de fugas térmicas
11.2 DoIP y expansión de OTA
La compatibilidad total con DoIP (ISO 13400) requiere un PHY Ethernet, componentes magnéticos y una pila TCP/IP en el microcontrolador. Esto añade entre 8 y 12 dólares al coste total de los materiales antes de considerar el desarrollo del firmware. La compatibilidad con CAN FD para la comunicación de datos a 5 Mbps añade entre 2 y 3 dólares más por unidad. El coste total incremental de los materiales para pasar de un escáner ICE a un hardware compatible con vehículos eléctricos es del 25 al 40 %, lo que equivale a entre 15 y 25 dólares por dispositivo.
Cuando los clientes solicitan “añadir diagnósticos para vehículos eléctricos”, la conversación es directa: no se trata de una simple casilla de verificación en el software. Implica seis meses de trabajo en la base de datos específica del vehículo, además de modificaciones de hardware que incrementan el costo unitario entre 15 y 25 dólares. Si va a adquirir un escáner compatible con vehículos eléctricos, solicite la lista de verificación de hardware DoIP y CAN FD, así como un informe de validación firmado para al menos tres plataformas de vehículos eléctricos antes de firmar la orden de compra.
“Exija la lista de verificación de hardware DoIP y CAN FD, además de un informe de validación firmado para al menos tres plataformas de vehículos eléctricos. No es una afirmación publicitaria. Es un documento firmado.”
12. ¿Por qué elegirnos para el desarrollo de dispositivos de diagnóstico automotriz?
No nos guiamos por la lista de características más extensa. Nos guiamos por los datos.
Nuestra capacidad de diseño de PCB va más allá del diseño EMC estándar, abarcando la inmunidad a transitorios específica para vehículos, validada en vehículos en funcionamiento con bancos de carga e inyectores de ruido, no solo en simulaciones. El fallo de la Mercedes Sprinter en 2023 generó un conjunto de reglas de diseño que ninguna norma ISO exige y que redujeron nuestra tasa de devoluciones por fallos de comunicación del 4.2 % al 0.3 %. Este conocimiento se incorpora a cada diseño que producimos actualmente.
La ingeniería de hardware de grado automotriz implica componentes AEC-Q100, cumplimiento con las normas ISO 7637 y 16750 como punto de partida, y estrategias documentadas para la sustitución de componentes antes de la fabricación del chip. La diferencia entre un escáner que supera la certificación y uno que resiste 200 000 ciclos de conexión en talleres reales no se refleja en una hoja de especificaciones.
El desarrollo de software embebido abarca todo el proceso: firmware de protocolo, gestión de la base de datos de la ECU, infraestructura de actualización OTA e integración en la nube. Consideramos la frecuencia de actualización de la base de datos como un entregable sujeto a un acuerdo de nivel de servicio (SLA): un máximo de 45 días desde el lanzamiento de un nuevo modelo hasta la validación de la actualización de la base de datos.
El servicio integral OEM y ODM garantiza que el cliente reciba un producto terminado, certificado y listo para el mercado. El programa incluye la gestión de las certificaciones CE, FCC y RoHS. La producción en masa se somete a una inspección funcional del 100 %. Se realiza una validación completa de la comunicación del vehículo en cada unidad antes del envío.
Y les explicamos a nuestros clientes lo que nuestra herramienta no hace. Limitaciones para eludir la puerta de enlace de seguridad en ciertas plataformas de 2024 en adelante. El flujo de trabajo híbrido necesario para la programación de la ECU en esos vehículos. El costo real de la preparación para vehículos eléctricos en hardware. Esta transparencia no es una debilidad en el proceso de ventas. Nuestros datos de pedidos repetidos indican lo contrario.
| 50+Flota de validación de vehículos | 45 DíasAcuerdo de nivel de servicio (SLA) para la actualización del año modelo máximo | 0.3%Tasa de fallos en las comunicaciones de campo | 100%Inspección funcional por unidad |
Todas las cifras provienen de registros internos de producción, registros de RMA y datos de validación de campo de más de 200 000 unidades enviadas. Las identidades de clientes y marcas se mantienen anónimas según los acuerdos de ODM.