1. Descripción general del proyecto
1.1 Antecedentes del cliente
El cliente comercializa cascos de seguridad inteligentes para los sectores de la construcción, la minería, el petróleo y el gas, y la industria pesada. Contaba con certificaciones de EPI pasivos y una sólida red de distribuidores en tres continentes. El problema era que la competencia estaba lanzando cascos conectados, y esta empresa no tenía con qué competir. El objetivo era transformar una carcasa de casco certificada en un dispositivo IoT en tiempo real, manteniendo las certificaciones EN 397 y ANSI Z89.1.
Lea también: Estudio de caso sobre la tableta de aprendizaje para la educación infantil inteligente
1.2 Objetivos del proyecto
Nos centramos en los seis objetivos desde el primer día.
- Seguimiento GPS en tiempo real
- Detección automática de caídas con alerta
- Sensores ambientales para la temperatura, con detección de gases opcional.
- Una duración mínima de la batería de doce horas
- Sellado hermético IP65 o IP67
- Un diseño de hardware escalable desde el prototipo hasta la producción en masa sin necesidad de una revisión completa.
Cada decisión de ingeniería posterior respondía a estos seis requisitos.
2. Desafíos de la industria en el desarrollo de cascos inteligentes
2.1 Entornos industriales adversos
En las obras de construcción se utiliza maquinaria pesada que genera vibraciones constantes. En los túneles mineros, la alta humedad y el polvo fino se combinan con la presencia de agua salada. Las plataformas marinas, además, generan salpicaduras de agua salada y golpes por la caída de equipos. Diseñar un sistema de sensores que funcione en un laboratorio es un problema; mantenerlo calibrado tras una caída de dos metros sobre hormigón, transmitiendo a través de conectores obstruidos por polvo, es un desafío completamente distinto.
2.2 Posicionamiento en interiores y exteriores
El GPS pierde la señal dentro de edificios con estructura de acero, pasajes subterráneos y almacenes con alta densidad de ocupación. Un trabajador que entra en un túnel desaparece del mapa de seguimiento en el momento en que se pierde la señal del satélite. El proyecto requería un enfoque híbrido.
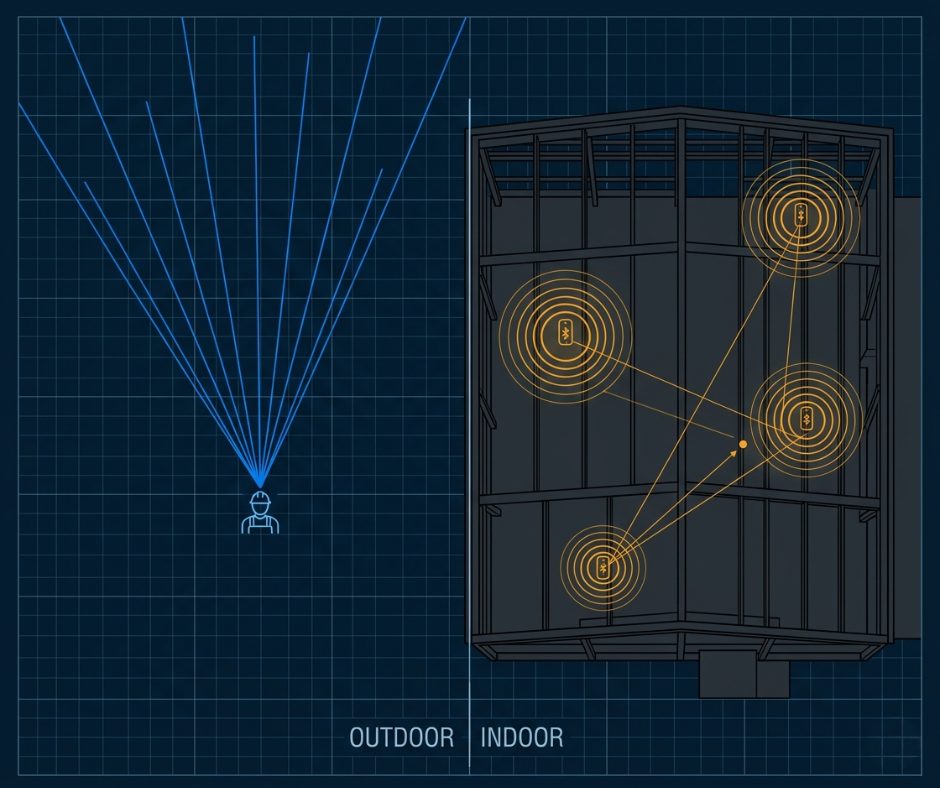
En exteriores, el GPS ofrece una precisión de cinco a diez metros, suficiente para tener una visión general del entorno. En interiores, se utiliza la triangulación de balizas BLE. Cuando la precisión submétrica es crucial, como en zonas de exclusión de maquinaria, las anclas UWB cubren esta necesidad. El cambio entre modos se produce automáticamente en función de la intensidad de la señal satelital, sin necesidad de intervención humana.
2.3 Fiabilidad de las alertas en tiempo real
Si una persona se cae, una alerta de seguridad que tarda cuarenta segundos en llegar es demasiado lenta para ser de ayuda.
Aquí está el desglose simple:
1. Conexión (LTE Cat-1)
La mayoría de los dispositivos utilizan LTE Cat-1 para datos. Es la mejor opción porque:
- Utiliza el mismo señal de 4G usos de tu teléfono.
- Envía mensajes rápidamente.
- Consume muy poca batería en comparación con el internet de alta velocidad estándar.
2. Señal de respaldo
Si un trabajador se encuentra en una zona remota sin señal de teléfono móvil, el dispositivo utiliza LoRa.
- Puede enviar una señal de “SOS” y su ubicación (GPS) a través de varios kilómetros.
- Es muy lento, pero funciona incluso cuando no hay 4G.
3. Memoria local
Cada vez que se produce una alerta, el dispositivo también guarda una copia de la información en el interior. memoria interna.
- Si la señal se interrumpe durante la transmisión, los datos no se pierden.
- El dispositivo espera hasta que el trabajador vuelva a estar en una zona con señal.
2.4 Gestión de energía
Una celda de 4,000 mAh montada en la parte delantera del casco desplaza el centro de gravedad hacia adelante y provoca fatiga cervical en pocas horas. La batería de producción es de 3,200 mAh y está ubicada en la parte trasera de la carcasa para contrarrestar el peso del módulo electrónico frontal. El sondeo GPS se realiza a intervalos de un segundo durante el movimiento y se reduce a quince segundos cuando el acelerómetro no detecta movimiento. El módem LTE entra en modo de suspensión entre ventanas de transmisión. Estos ajustes, en conjunto, aumentaron la autonomía en condiciones reales a quince horas, superando con creces el objetivo de doce horas.
3. Diseño de la arquitectura del sistema
3.1 Plataforma de procesamiento central
El cerebro de este dispositivo es un pequeño chip con gran capacidad para realizar cálculos matemáticos. Utiliza un programa sencillo para gestionar diversas tareas, como detectar caídas y enviar mensajes. Los creadores eligieron un chip pequeño porque consume muy poca energía, se inicia al instante y es más fácil de manejar. Además, cuenta con un segundo chip auxiliar, también pequeño, que permanece activo constantemente para detectar movimiento. Esto permite que el cerebro principal se apague por completo y ahorre batería hasta que el chip auxiliar detecte una caída y lo active.
3.2 Integración de sensores
La unidad de medición inercial es un dispositivo MEMS de seis ejes con un acelerómetro y un giroscopio de tres ejes integrados en un mismo chip. Durante la detección de actividad, el acelerómetro toma muestras a 400 Hz para alimentar el sistema de detección de caídas. El módulo GPS, de tan solo 18 mm de tamaño y con antena integrada, logra un arranque en frío en menos de treinta segundos a cielo abierto.
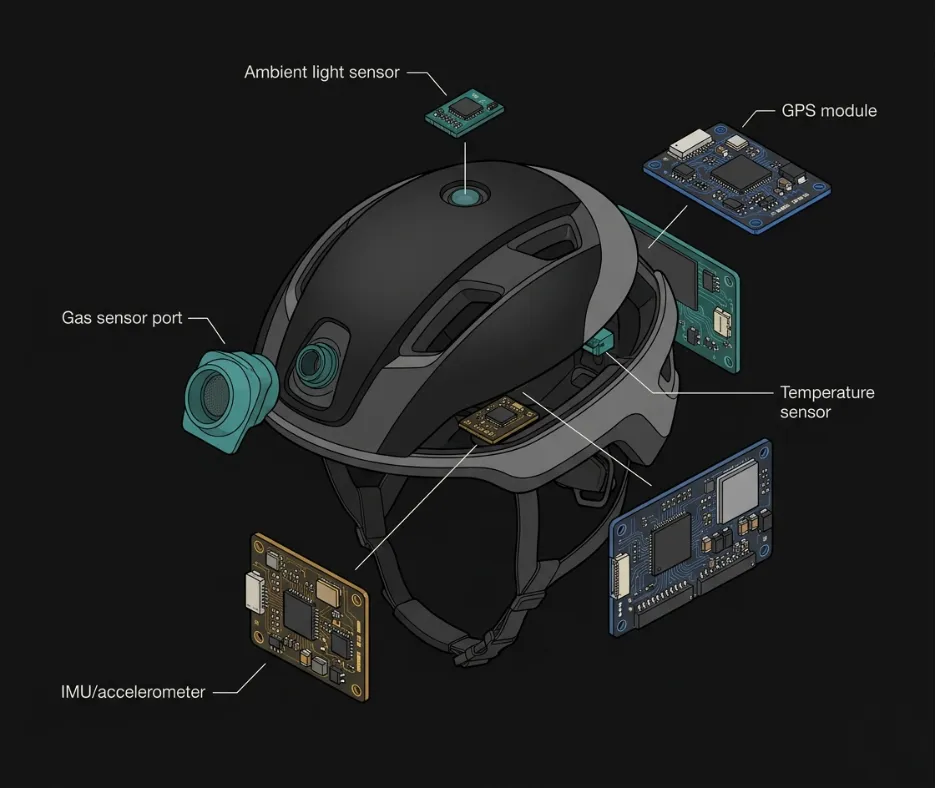
Un sensor de temperatura de un solo cable monitoriza las condiciones térmicas ambientales y de la batería. Dos puertos opcionales para sensores de gas admiten módulos electroquímicos de CO y H2S mediante un conector estandarizado, por lo que la misma placa de circuito impreso base funciona tanto en construcciones estándar como en entornos con gases de alto riesgo.
3.3 Arquitectura de la comunicación
Cuatro protocolos conforman la pila de conectividad. LTE Cat-1 gestiona la transmisión principal de datos y alertas. Bluetooth 5.0 administra el emparejamiento con la aplicación móvil complementaria y también controla la función de posicionamiento en interiores mediante el escaneo de balizas BLE. LoRa cubre la comunicación de emergencia en caso de fallo de la red celular. Un botón SOS cableado, independiente del estado del firmware, activa una alerta incluso si la aplicación principal falla.
3.4 Integración de la nube y del backend
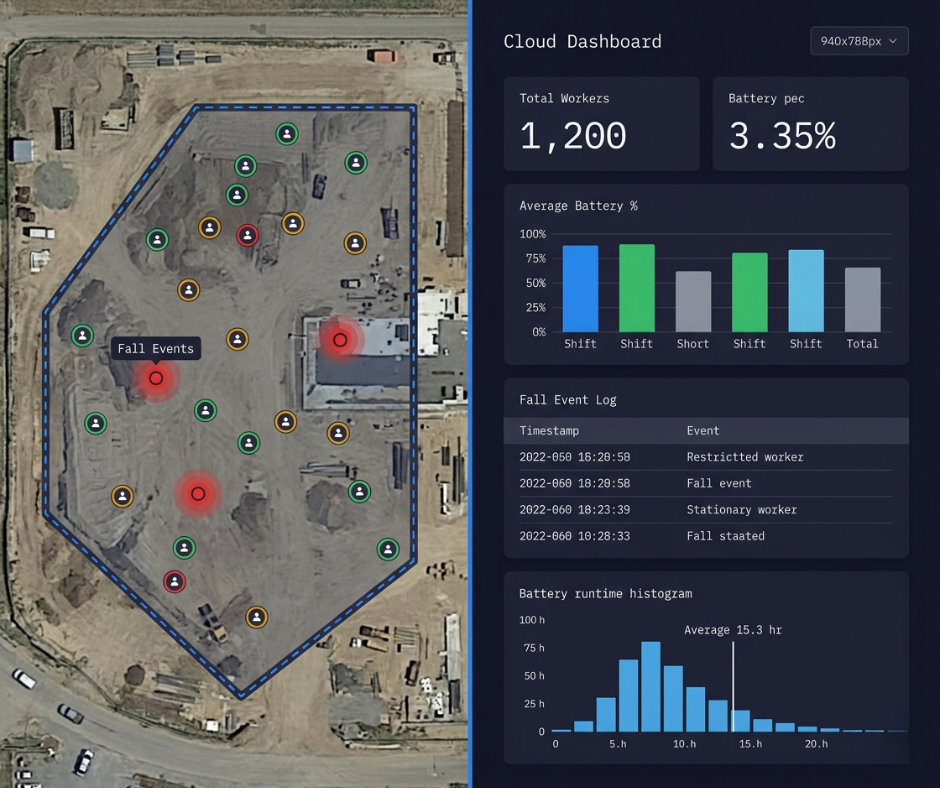
Los datos llegan a la nube a través de un intermediario MQTT, elegido por su bajo consumo de recursos en enlaces celulares limitados. El panel web muestra la ubicación de los trabajadores en tiempo real superpuesta en un plano del sitio, con códigos de color según el estado de la actividad. Las caídas, las infracciones de geocercas y las activaciones de SOS generan registros de incidentes con marca de tiempo. La actualización de firmware inalámbrica (OTA) distribuye las actualizaciones a toda la flota sin necesidad de retirar físicamente los cascos.
4. Ingeniería de PCB y hardware
4.1 Diseño de PCB multicapa compacto
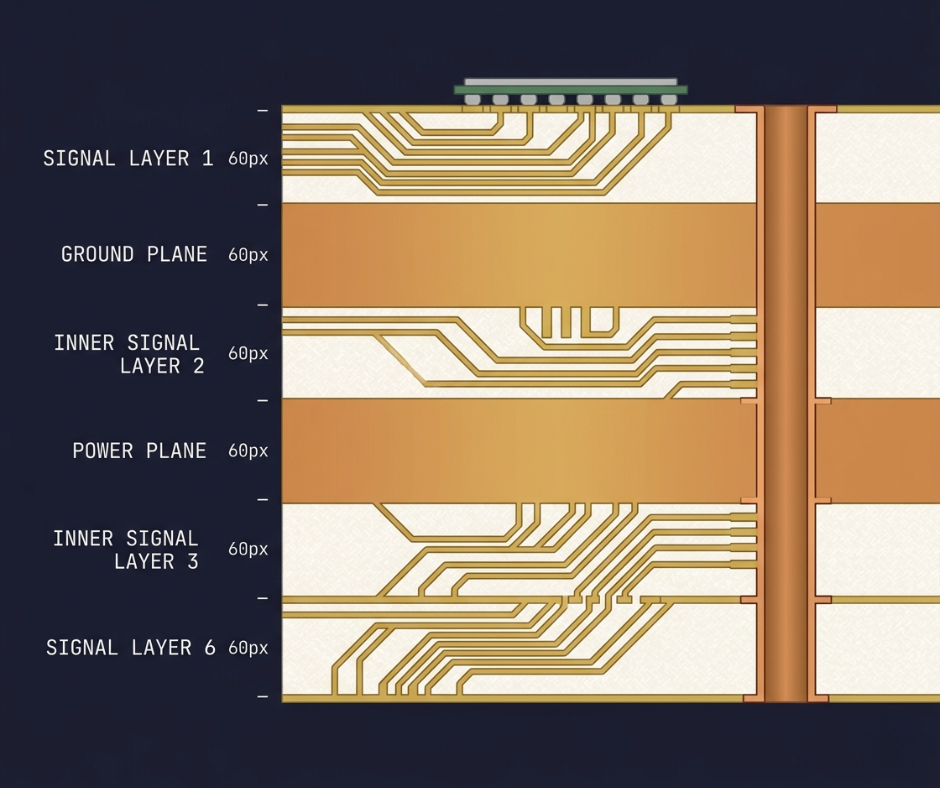
La placa principal tiene un diseño de seis capas de 58 mm x 42 mm. El plano de tierra de RF se ubica directamente debajo de la capa de señal superior, lo que permite que las pistas de la antena sean cortas y con impedancia controlada. El módem LTE y el módulo GPS ocupan esquinas opuestas de la placa, separados por una barrera de cobre que bloquea la desensibilización del receptor por parte del transmisor LTE. Se han soldado protectores contra interferencias electromagnéticas (EMI) sobre ambas secciones de RF. El trazado de las capas internas utiliza curvas de 45 grados en lugar de ángulos rectos para reducir las reflexiones de alta frecuencia.
4.2 Sistema de gestión de energía
El circuito integrado de gestión de energía realiza cuatro funciones: carga de la batería a hasta 1 A, distribución de energía entre los rieles de 1.8 V, 3.3 V y 5 V, información del estado de carga de la batería a través de I2C y protección contra sobretensión, sobrecorriente y descarga profunda. La carga acepta entrada tanto del puerto USB-C como del contacto pogo-pin de la base de acoplamiento. Un circuito integrado dedicado para el indicador de carga monitoriza la capacidad restante con un margen de error inferior al tres por ciento en función de la temperatura. El firmware lee este valor cada treinta segundos y lo informa junto con los datos de posición.
4.3 Módulo electrónico resistente a impactos
La placa de circuito impreso se monta sobre cuatro separadores M2 con arandelas de neopreno entre la placa y el marco, absorbiendo el pico de aceleración máximo de una caída de dos metros. Los conectores encapsulados de todos los arneses de cableado externos impiden la entrada de humedad en los puntos de salida de los cables de la carcasa del módulo. La carcasa es de ABS de 2.5 mm de espesor con un sobremoldeo de TPE en la interfaz, lo que proporciona el sellado necesario para la protección IP67 según la norma IEC 60529.
5. Diseño Mecánico e Industrial
5.1 Integración estructural del casco
El módulo electrónico se aloja en una cavidad integrada en la parte posterior de la carcasa durante el proceso de fabricación, en lugar de cortarse posteriormente en una carcasa ya existente.
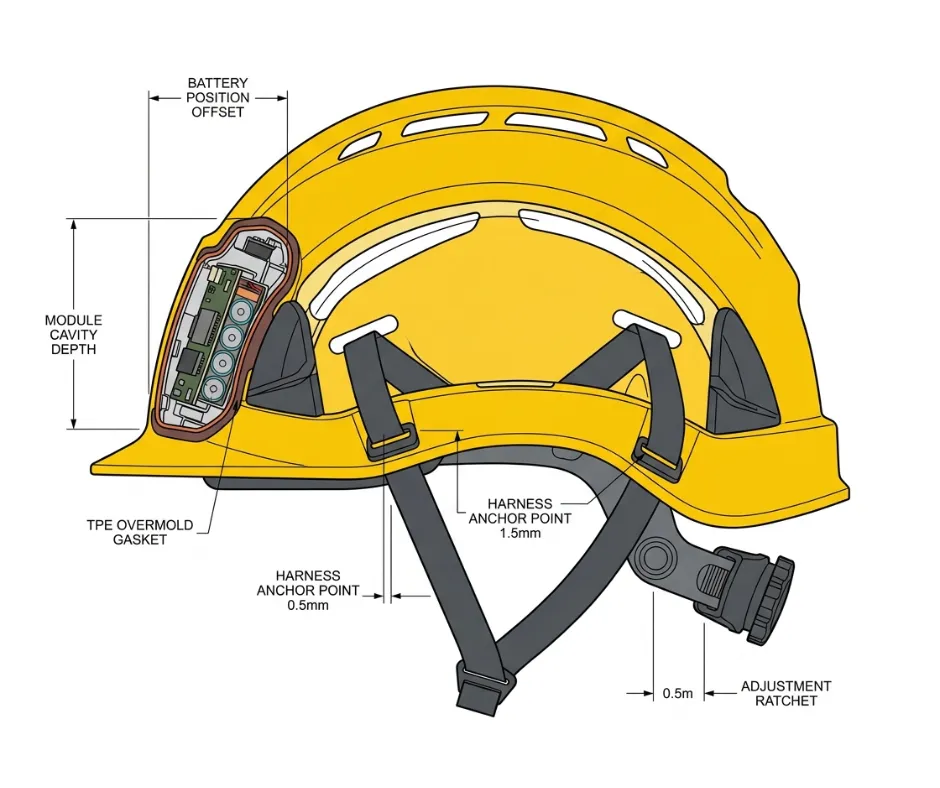
Esta distinción permitió mantener intacta la geometría estructural para las pruebas de atenuación de impacto EN 397. La carcasa superó repetidas pruebas de caída con todos los componentes electrónicos instalados, lo que confirma que la masa adicional no redujo la protección. Los operarios pueden cambiar la batería en el lugar de trabajo, pero la extracción del módulo principal requiere una herramienta, lo que evita el desmontaje accidental en obra.
5.2 Ergonomía y Confort
El peso total del casco, con batería incluida, es de 520 gramos, lo que se encuentra dentro del rango aceptable para un uso continuo de ocho horas. El arnés interno de trinquete de seis puntos se rediseñó con un desplazamiento hacia adelante de 15 mm, lo que desplaza el equilibrio del casco hacia atrás para contrarrestar la carga de los componentes electrónicos frontales. Los canales de ventilación en la carcasa permanecen despejados. Las pruebas realizadas a una temperatura ambiente de 38 °C confirmaron que el módulo electrónico no genera puntos de concentración de calor en el cuero cabelludo del trabajador.
5.3 Diseño modular
La batería se extrae por un puerto lateral y se bloquea con un mecanismo de cuarto de vuelta. Su reemplazo lleva menos de treinta segundos sin herramientas. En lugares de trabajo, tanto de día como de noche, la gente lleva baterías adicionales cargándose. Por ejemplo, los trabajadores cambian una batería descargada por una cargada para que el casco nunca deje de funcionar. Además, se puede fabricar un casco para detectar gases sin necesidad de comprar una placa de circuito interno completamente nueva. Simplemente se desconecta la pieza antigua y se conecta un nuevo módulo sensor mediante un conector sencillo, lo que resulta mucho más fácil y económico.
6. Funcionalidades de software e IA
6.1 Algoritmo de detección de caídas
Un enfoque basado únicamente en umbrales produce demasiadas falsas alarmas cuando los trabajadores se agachan, suben escaleras o dejan caer el casco sobre una superficie. En cambio, el algoritmo consta de tres fases. La primera fase detecta una señal de caída libre: lecturas de gravedad baja y sostenidas en los tres ejes, lo que indica la fase de ingravidez de una caída real.

La segunda fase detecta un evento de alto impacto que supera un umbral configurable. La tercera fase espera ocho segundos a que el trabajador retome su movimiento normal. Si no lo hace, el evento se clasifica como una caída y se activa una alerta. En comparación con un diseño de umbral único, este enfoque de tres fases redujo las alertas innecesarias en aproximadamente un setenta por ciento en las pruebas de campo.
6.2 Geocercas y zonas de seguridad
Los supervisores utilizan un mapa digital para delimitar zonas de seguridad alrededor de áreas peligrosas, como lugares con riesgo de explosiones o con alta tensión eléctrica. Si un trabajador entra en una de estas zonas, el dispositivo emite una alerta de inmediato. El sistema es lo suficientemente inteligente como para identificar estas zonas por sí solo. Esto significa que, incluso con una señal de internet débil, la alarma se activará para garantizar la seguridad del trabajador.
6.3 Comunicación de emergencia
Al pulsar el botón SOS, se genera un paquete prioritario con coordenadas GPS, ID del dispositivo y marca de tiempo. El paquete se transmite simultáneamente a través de todos los canales disponibles: LTE primero y LoRa como alternativa. La plataforma marca los eventos SOS con la máxima prioridad y puede enviar notificaciones SMS a los contactos de emergencia preconfigurados. El módulo de voz bidireccional opcional utiliza la conexión LTE, lo que permite al supervisor hablar directamente con un trabajador incapacitado sin necesidad de una radio independiente.
7. Seguridad y Cumplimiento
7.1 Normas de seguridad para cascos
Este casco de seguridad cumple con las normas de seguridad oficiales más exigentes de Estados Unidos, Europa y Canadá. Lo más importante es que el casco fue probado y aprobado con todos los componentes electrónicos ya instalados. Esto requirió una estrecha coordinación con el laboratorio de pruebas durante el diseño de las herramientas. Cualquier cambio en la geometría de la carcasa tras la aprobación inicial de la certificación conlleva una nueva prueba completa, por lo que era fundamental acertar con el diseño de la cavidad en la primera revisión de las herramientas.
7.2 Cumplimiento electrónico
El conjunto de radio cuenta con la autorización de la FCC para Norteamérica y el marcado CE conforme a la Directiva de Equipos Radioeléctricos para Europa. El cumplimiento de la normativa RoHS se confirmó durante la adquisición de componentes, al exigir documentación a cada proveedor antes de realizar los pedidos. La batería cuenta con la certificación UN38.3 para transporte aéreo, requisito indispensable para la distribución internacional. La declaración REACH abarca la lista completa de materiales.
7.3 Normas de ensayos ambientales
El sellado IP67 se verificó mediante inmersión en agua a un metro de profundidad durante treinta minutos sin que se produjera ninguna entrada de agua. Las pruebas de vibración se realizaron en una mesa vibratoria con el casco ensamblado, siguiendo el perfil IEC 60068-2-6, durante dos horas por eje. El ciclo térmico abarcó un rango de temperatura de -20 a +70 grados Celsius durante veinte ciclos. Las pruebas de emisiones radiadas EMC confirmaron que el dispositivo no interfiere con las comunicaciones de radio ni con las redes de sensores inalámbricos ya desplegadas en las obras.
8. Pruebas y Validación
8.1 Pruebas funcionales
Las pruebas de precisión del GPS utilizaron un receptor GNSS de referencia para comparar las lecturas en treinta puntos de un campo abierto. El GPS del casco coincidió con la referencia con una precisión promedio de 4.2 metros. La calibración del acelerómetro utilizó un dispositivo estático de seis posiciones para verificar la alineación del eje y corregir la desviación. Las pruebas de rendimiento LTE midieron el tiempo de carga de un paquete completo de sensores con niveles de señal de hasta -110 dBm, lo que confirmó la transmisión en el borde de la celda, donde se ubican muchas obras de construcción.
8.2 Pruebas de durabilidad
La placa de circuito impreso resistió repetidas caídas desde 1.5 metros de altura sobre una placa de acero, lo cual se verificó mediante inspección visual con aumento de diez veces y una prueba funcional completa después de cada evento. No se observaron fallas en las soldaduras ni separación de los conectores. Una prueba de vibración continua de 500 horas en un banco de pruebas automotriz no produjo migración de componentes. Tras sesenta días de exposición a la intemperie en diez unidades ensambladas, todas superaron la verificación funcional completa.
8.3 Pruebas de batería y rendimiento
Quince unidades ejecutaron un protocolo de simulación de campo: conexión LTE, sondeo GPS a intervalos de un segundo, publicidad BLE activa y registro de sensores cada cinco segundos. El tiempo de funcionamiento promedio de la flota fue de 15.3 horas. Tres unidades superaron las dieciséis horas. Ninguna bajó de las catorce. Tras 500 ciclos completos de carga y descarga, todas las baterías conservaron más del 80 % de su capacidad, lo que corresponde a un intervalo de reemplazo de entre dieciocho meses y dos años en condiciones de uso diario.
9. Fabricación y producción en masa
9.1 Optimización de DFM
La revisión del diseño para la fabricación, con un pedido mínimo de 500 unidades, identificó tres puntos de reducción de costos. Las carcasas de protección RF pasaron de fabricarse con chapa metálica doblada a medida a piezas estampadas, lo que redujo el costo unitario en un 22 %. Se obtuvo la certificación de un módulo GPS alternativo con especificaciones eléctricas idénticas de un segundo proveedor, eliminando así el riesgo de depender de un único proveedor. La racionalización de los puntos de prueba redujo la complejidad de los dispositivos de prueba y el tiempo de prueba por unidad de 4.5 minutos a 2.8 minutos.
9.2 Montaje superficial y ensamblaje
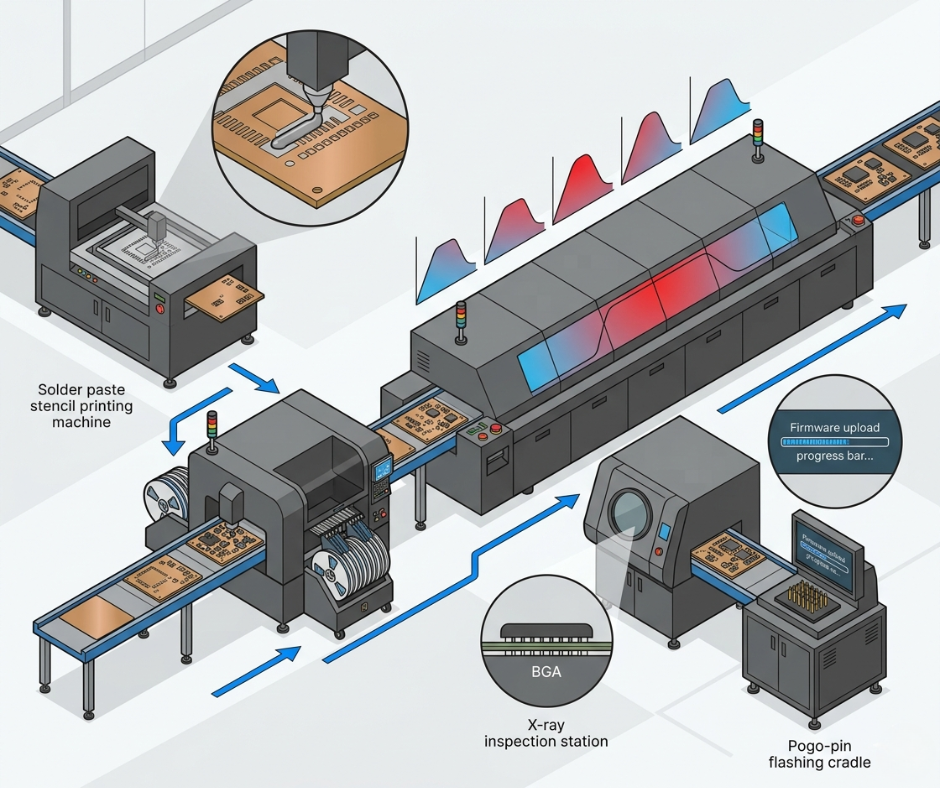
El ensamblaje de la placa de circuito impreso se realiza en un horno de reflujo de seis zonas diseñado según los requisitos de soldadura del módem BGA LTE. Cada placa se somete a una inspección por rayos X para confirmar la integridad de las uniones BGA. Se aplica una junta de silicona de dos componentes entre la carcasa de la placa y la cavidad, con compresión controlada por un par de apriete específico en los cuatro tornillos cautivos M3. La programación final del firmware utiliza una base de pines pogo que programa las cuatro regiones de memoria, realiza una autocomprobación y graba el número de serie de la unidad en la memoria no volátil en un ciclo de sesenta segundos.
9.3 Garantía de calidad
Cada unidad supera pruebas funcionales automatizadas que incluyen adquisición GPS, registro LTE, publicidad BLE, respuesta del acelerómetro, activación de botones, precisión del voltaje de la batería e integridad del sellado IP mediante prueba de caída de presión. Un rodaje de 48 horas a 45 °C elimina los fallos iniciales antes del envío. El dos por ciento de las unidades se someten a pruebas de RF conducidas contra una referencia calibrada para detectar defectos en el ensamblaje de la antena que no superan la inspección visual.
10. Resultados del proyecto
10.1 Logros técnicos
La versión de producción ofrece una precisión GPS inferior a cinco metros en exteriores y una precisión BLE de uno a dos metros en interiores equipados con balizas. El casco detecta con gran precisión las caídas. En las pruebas, acertó el 98 % de las veces. Casi nunca envía una falsa alarma por error. Además, la batería dura más de 15 horas, lo que proporciona energía para todo el día.
10.2 Despliegue en el mercado
La primera implementación incorporó a 1,200 trabajadores de tres obras activas a la plataforma. El panel de control monitorizaba las posiciones en tiempo real y generaba informes de seguridad automatizados. En los primeros sesenta días, la flota registró catorce incidentes reales de caídas, cada uno de los cuales requirió una respuesta oportuna del supervisor. El marco de trabajo del fabricante permite a los distribuidores regionales personalizar su marca, ajustar las configuraciones de geocercas para tipos de obra específicos y seleccionar entre variantes de sensores estándar y de detección de gases a partir de una unidad base compartida.
11. Expansión futura
11.1 Integración de vídeo mediante IA
Una variante del módulo de cámara incorpora un sensor gran angular en la frente. La inferencia en el dispositivo, mediante un modelo CNN comprimido, detecta el incumplimiento de las normas de EPI (por ejemplo, cuando un trabajador se quita el casco en una zona obligatoria), sin necesidad de transmitir el vídeo sin procesar a la nube. El procesamiento en el borde resuelve tanto las limitaciones de ancho de banda como las preocupaciones sobre la privacidad de los trabajadores sin requerir cambios en la infraestructura in situ.
11.2 Ecosistema de construcción inteligente
El casco se combina con un chaleco de seguridad conectado que incorpora sus propios sensores, creando una red corporal por trabajador. Ambos dispositivos comparten una única identidad en la nube, lo que permite a la plataforma cruzar los datos de postura del chaleco con los datos de movimiento del casco para obtener una evaluación más precisa del riesgo ergonómico. El análisis de flotas identifica los centros o turnos con tasas de incidentes estadísticamente elevadas antes de que se produzca una lesión, en lugar de después.
12. Por qué funciona este enfoque de desarrollo
El diseño de un casco de seguridad inteligente no es un proyecto de software con hardware añadido. El estándar del casco es primordial, y la electrónica se integra con lo que queda. Esta secuencia exige un equipo con experiencia en programas de certificación, que conozca los límites estructurales de las normas EN 397 y ANSI Z89.1, y que diseñe la geometría de la placa de circuito impreso (PCB) en función del espacio disponible en la carcasa, en lugar de esperar que esta se adapte a un módulo estándar. El resultado es un dispositivo que permite al responsable de obra elegir entre protección y conectividad. Ambos aspectos están certificados, se mantienen mediante actualizaciones inalámbricas (OTA) y se adaptan al crecimiento de la implementación.
¿Listo para desarrollar un casco de seguridad inteligente o un dispositivo portátil industrial conectado? Contacte con el equipo de ingeniería de Wonderful PCB para definir el alcance de su solución personalizada de seguridad para los trabajadores.