CASE STUDY
Studium przypadku technicznego skanera diagnostycznego do samochodów, obejmujące ponad 200 000 jednostek dostarczonych w ramach wielu linii ODM — obejmujące rzeczywiste decyzje dotyczące architektury, awarię w terenie, która zmieniła nasze zasady dotyczące płytek PCB, oraz dane dotyczące faktycznych przyczyn zwrotów.
| 200k + klientówJednostki wysłane | 4.2% → 0.3%Współczynnik awaryjności komunikacji | 68%RMA: Brak danych OEM | 40-60%Prawdziwe ulepszone pokrycie |
1. Przegląd projektu
1.1 Informacje o kliencie
Klientem była marka sprzętu do obsługi samochodów, oferująca ugruntowaną linię podstawowych narzędzi OBD – adapterów opartych na ELM327 i podstawowych czytników kodów. Chcieli oni awansować w łańcuchu wartości, oferując profesjonalne skanery wielosystemowe.
Rynek docelowy: niezależne warsztaty naprawcze, obsługa flot i serwisy dealerskie. Rynki objęte badaniem od pierwszego dnia obejmowały Amerykę Północną i Europę, a Azja była celem w drugiej fazie.

Luka, którą próbowali załatać, była realna. Narzędzia klasy podstawowej odczytują standardowe kody układu napędowego. Profesjonalne warsztaty potrzebują ABS, SRS, skrzyni biegów, TPMS, dwukierunkowych sterowników i danych z ECU w czasie rzeczywistym w przypadku dziesiątek marek. Ten skok nie jest aktualizacją oprogramowania układowego. To zupełnie inny sprzęt i oprogramowanie.
Przeczytaj także: Studium przypadku wytrzymałego tabletu
1.2 Cele projektu
• Pełna zgodność z OBD-II jako podłoga, a nie sufit
• Obsługa wielu protokołów CAN, LIN i FlexRay
• Analiza danych ECU w czasie rzeczywistym z niskim opóźnieniem
• Łączność bezprzewodowa umożliwiająca synchronizację z chmurą i zdalną diagnostykę
• Trwałość klasy przemysłowej do zastosowań w warsztatach
• Projekt gotowy do produkcji, zatwierdzony do globalnej certyfikacji
• Przejrzysta ścieżka aktualizacji diagnostyki pojazdów elektrycznych bez konieczności całkowitego przeprojektowania sprzętu
2. Wyzwania branżowe w rozwoju narzędzi diagnostycznych dla branży motoryzacyjnej
2.1 Zgodność z wieloma protokołami
Deklaracja „ponad 95% modeli pojazdów” widnieje na każdym pudełku ze skanerem na rynku. Po wysłaniu ponad 200 000 egzemplarzy, w tym klonów ELM327 i tabletów obsługujących pełen zakres protokołów, możemy dokładnie powiedzieć, co kryje się za tą liczbą.
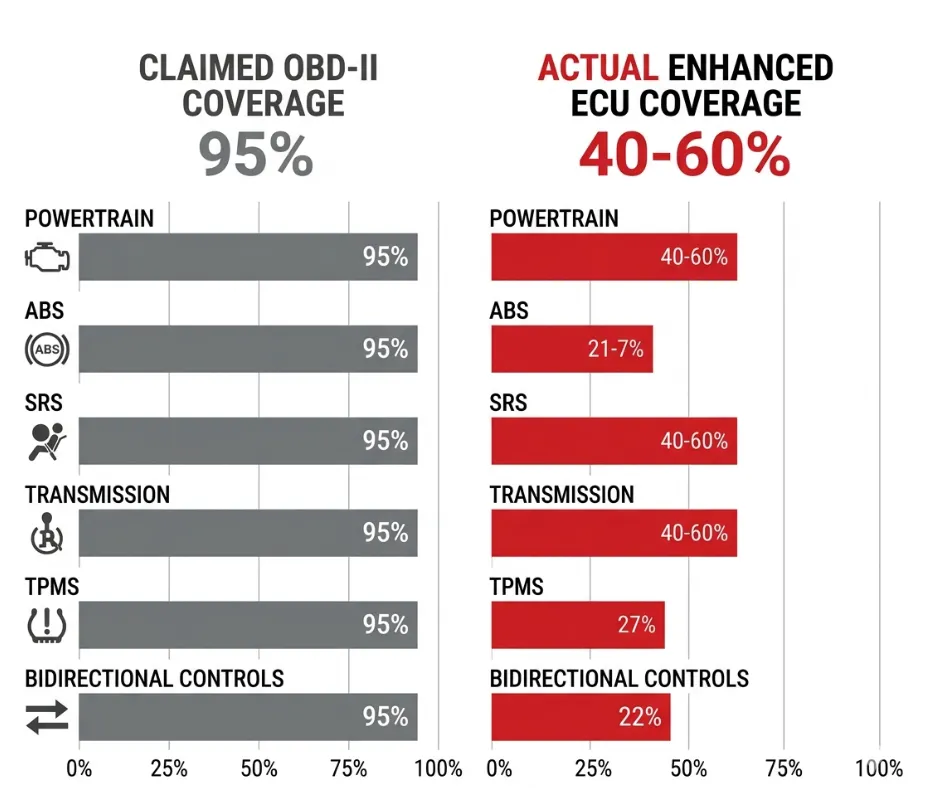
Urządzenie spełnia jedynie podstawowe wymogi prawne dotyczące zgodności z OBD-II — SAE J1979 i ISO 15031 w trybach od 01 do 0A dla pięciu starszych protokołów: ISO 9141-2, ISO 14230-4 KWP2000, SAE J1850 PWM i VPW oraz ISO 15765-4 CAN przy 250 i 500 kb/s. Oznacza to, że urządzenie odczytuje ogólne identyfikatory PID układu napędowego, statusy MIL i obrazy zamrożone w każdym pojeździe wyprodukowanym w USA w 1996 roku i nowszym, który spełnia minimalne wymagania prawne.
Czego nie obejmuje: zdefiniowanych przez producenta PID-ów, dostępu do modułów ABS/SRS/przekładni/TPMS, sterowania dwukierunkowego, adaptacji ani zabezpieczeń dostępu. Pojazdy wyprodukowane po 2018 roku, wykorzystujące UDS w magistrali CAN lub CAN FD, jeszcze bardziej poszerzają tę lukę. Kiedy prowadziliśmy własną flotę walidacyjną składającą się z 50 pojazdów, skanery deklarujące 95% podstawowej zgodności osiągały średnio tylko 40–60% w przypadku danych rozszerzonych dla pojazdów spoza USDM.
| Inżynierowie ds. zakupów metryk powinni zażądać: szczegółowej macierzy pokrycia rozszerzonego OEM w Excelu, podzielonej według marki, modelu i roku – pokazującej obsługiwane rozszerzone kody błędów DTC dla każdego sterownika ECU, status CAN FD i DoIP, możliwość przejścia przez J2534 oraz częstotliwość aktualizacji bazy danych. Wszystko inne to marketing. |
2.2 Stabilność komunikacji ECU
Środowiska elektryczne pojazdów są nieprzyjazne. Wtryskiwacze common rail w silnikach Diesla, hałas przełączania alternatora i spadki obciążenia podczas rozruchu silnika generują stany przejściowe, których testy laboratoryjne nigdy nie wykryją. Napięcie na porcie OBD waha się od 9 V do 36 V w zależności od pojazdu, stanu ładowania i innych czynników działających na magistrali. Zabezpieczenie przed odwrotną polaryzacją nie jest opcjonalne — jest elementem gwarancji.
Przekonaliśmy się o tym na własnej skórze. Projekt ODM z 2023 roku, wykorzystujący układ SoC GD32F103 z transceiverem CAN TJA1050, przeszedł 100% testów laboratoryjnych — bezbłędne schematy, brak utraty pakietów przy prędkości 500 kb/s. Pierwsza awaria wystąpiła w europejskim warsztacie w Mercedesie Sprinterze z silnikiem Diesla z 2019 roku. Urządzenie okresowo odłączało się od magistrali, wyrzucało kody U0100 utraty komunikacji i powodowało błędne kasowanie błędów DTC. Przyczyna: zbyt małe diody TVS i brak dławików sygnału wspólnego w magistralach CANH i CANL. Przejściowe napięcia zgodnie z normą ISO 7637-2 Impulsy 3a i 3b — do +/-150 V podczas rozruchu silnika — były sprzężone bezpośrednio przez złącze OBD. Transceiver przeszedł testy laboratoryjne i uległ awarii w terenie po około 200 godzinach pracy.
2.3 Złożoność bazy danych oprogramowania
Nasze dane RMA, obejmujące 120 000 egzemplarzy w ciągu 18 miesięcy, pokazują, że 68% zwrotów jest zgłaszanych jako „nie działa w moim modelu XYZ z 2024 roku” – nawet gdy sprzęt obsługuje odpowiednie protokoły. Brakowało wpisu w bazie danych specyficznego dla producenta OEM lub negocjacja klucza bezpieczeństwa zakończyła się niepowodzeniem. W przypadku egzemplarzy z rzadkimi aktualizacjami bazy danych OTA wskaźnik zwrotów wynosi od 18 do 22% w przypadku pojawienia się nowego roku modelowego. To problem biznesowy, a nie sprzętowy.
2.4 Wytrzymałe środowisko warsztatowe
Mechanicy nie traktują tabletów diagnostycznych delikatnie. Pozostawiają skanery podłączone podczas testów alternatora, cykli dokręcania kluczyków i uruchamiania silnika za pomocą kabli rozruchowych. Narzędzia spadają z progów drzwi pojazdu, pokrywają się olejem i pozostawiają na noc w zimnych furgonetkach. Zakres temperatur od -10 do 55 stopni Celsjusza nie jest wartością z karty katalogowej — to rzeczywisty zakres, jaki skaner widzi między styczniowym porankiem na parkingu w Minnesocie a komorą silnika latem w Teksasie.
3. Projekt architektury systemu
3.1 Podstawowa platforma przetwarzania
Głównym procesorem aplikacji jest seria ARM Cortex-A z systemem Android lub Linux. Android wygrywa pod względem szybkości tworzenia interfejsów użytkownika i dojrzałości ekosystemu OTA. Linux jest bardziej przejrzysty dla ścieżek diagnostycznych wrażliwych na opóźnienia. Dedykowany mikrokontroler (MCU) oddzielnie obsługuje warstwę sterowania komunikacją — odłączenie procesora aplikacji od magistrali pojazdu zmniejsza opóźnienia, poprawia izolację błędów i zapobiega awarii oprogramowania, która mogłaby przerwać aktywne sesje ECU. Docelowy czas rozruchu wynosił poniżej 10 sekund od zimnego włączenia do stanu gotowości diagnostycznej.
3.2 Interfejs komunikacyjny pojazdu
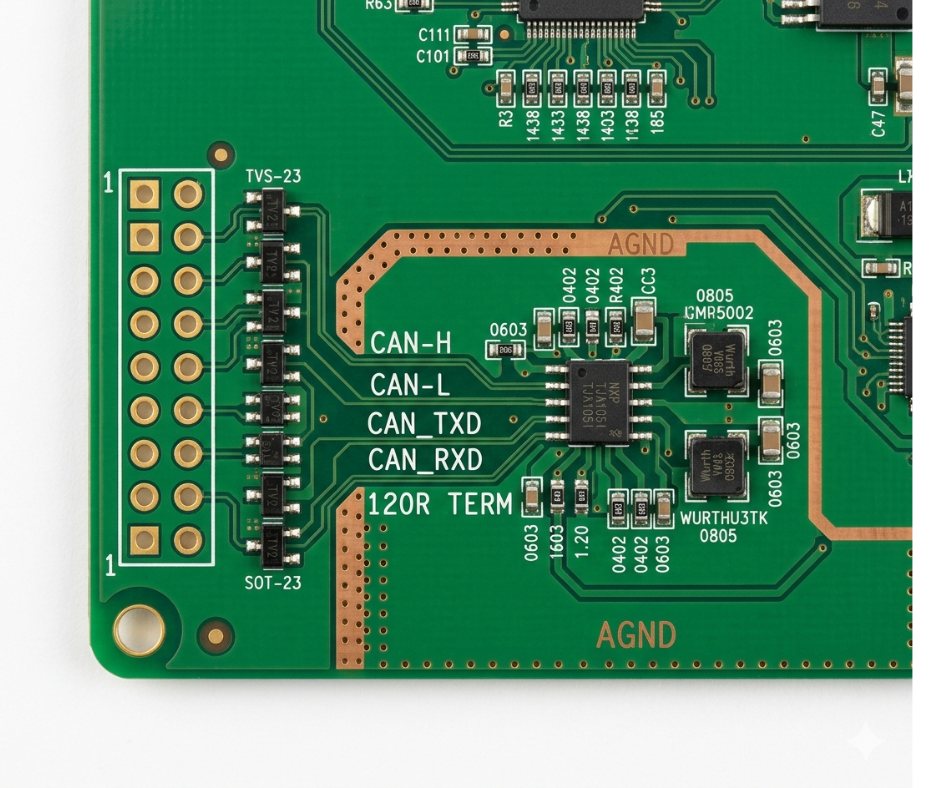
16-pinowe złącze OBD-II stanowi punkt wejścia, ale większość projektów zawodzi na warstwie fizycznej za nim. Architektura wykorzystuje szybkie i wolne transceivery CAN, odpowiedni układ scalony sterownika linii K i linii L – a nie dyskretne tranzystory – transceiver LIN oraz opcjonalny protokół DoIP przez Ethernet dla platform z 2020 roku i nowszych.
Wybór sterownika linii K ma większe znaczenie, niż się wydaje. Tanie implementacje dyskretne nie oferują tolerancji na napięcie 12 V, kontroli szybkości narastania napięcia i funkcji wyłączania w przypadku przegrzania, tak jak dedykowane układy scalone, takie jak L9637. W starszych azjatyckich i europejskich sterownikach (ECU), które podnoszą napięcie linii do 12 V podczas inicjalizacji, różnica ta objawia się przerywaną komunikacją, praktycznie niemożliwą do debugowania w terenie. Obsługa DoIP wymaga warstwy fizycznej Ethernet, układów magnetycznych i stosu TCP/IP w mikrokontrolerze – koszt BOM wzrasta o 8–12 dolarów, zanim uwzględniona zostanie złożoność oprogramowania układowego. Nie jest to pole wyboru oprogramowania.
3.3 Łączność bezprzewodowa
• WiFi 5 i 6 do szybkiej synchronizacji bazy danych i rejestrowania sesji w chmurze
• Bluetooth 5.0 do parowania z komputerem warsztatowym i zdalnego wyświetlania
• Opcjonalny moduł 4G LTE do diagnostyki w chmurze z pojazdów w terenie
• Moduł LTE obsługuje również zdalną pomoc techniczną dzięki udostępnianiu strumienia danych na żywo
3.4 Przechowywanie i bezpieczeństwo
Pamięć eMMC o pojemności od 32 do 128 GB, w zależności od wersji SKU. Sama baza danych pojazdów, z pełnym pokryciem OEM dla marek z USA, UE i Azji, obejmuje ponad 20 GB (przed uwzględnieniem logów i zapisów sesji). Bezpieczna architektura aktualizacji oprogramowania układowego wykorzystuje podpisane pakiety aktualizacji, zweryfikowany łańcuch rozruchowy i szyfrowane kanały OTA. Uwierzytelnianie użytkowników i szyfrowane kanały komunikacji to podstawa każdego profesjonalnego narzędzia sprzedawanego w środowiskach flotowych i dealerskich.
4. Inżynieria PCB i sprzętu
4.1 Projektowanie płytek PCB wielowarstwowych
Awaria Mercedesa Sprintera w 2023 roku zmieniła nasze zasady dotyczące PCB. Autopsja wykazała dzwonienie na liniach CAN przekraczające 2 Vpp – bezpośrednie naruszenie normy ISO 11898-2 – spowodowane niewystarczającym filtrowaniem sygnału wspólnego i słabą separacją płaszczyzny masy. Przeszliśmy na układ 6-8-warstwowy z dedykowaną analogową płaszczyzną masy pod sekcją transceivera. Żadne ścieżki cyfrowe nie przecinają magistrali CAN. Zszywane co 5 mm wokół sekcji analogowej. Układ EMI jest ograniczeniem pierwszego etapu, a nie elementem audytu poprojektowego.
Komponenty klasy motoryzacyjnej: rozszerzone parametry temperaturowe, kwalifikacja AEC-Q100 w stosownych przypadkach, dobór układów scalonych o długim cyklu życia ze strategią zastępczą udokumentowaną przed wymianą. Sekcja warstwy fizycznej wykorzystuje dedykowany protokół, front-end ASIC z programowalną terminacją i logiką tłumienia impulsów.
4.2 Projekt zarządzania energią
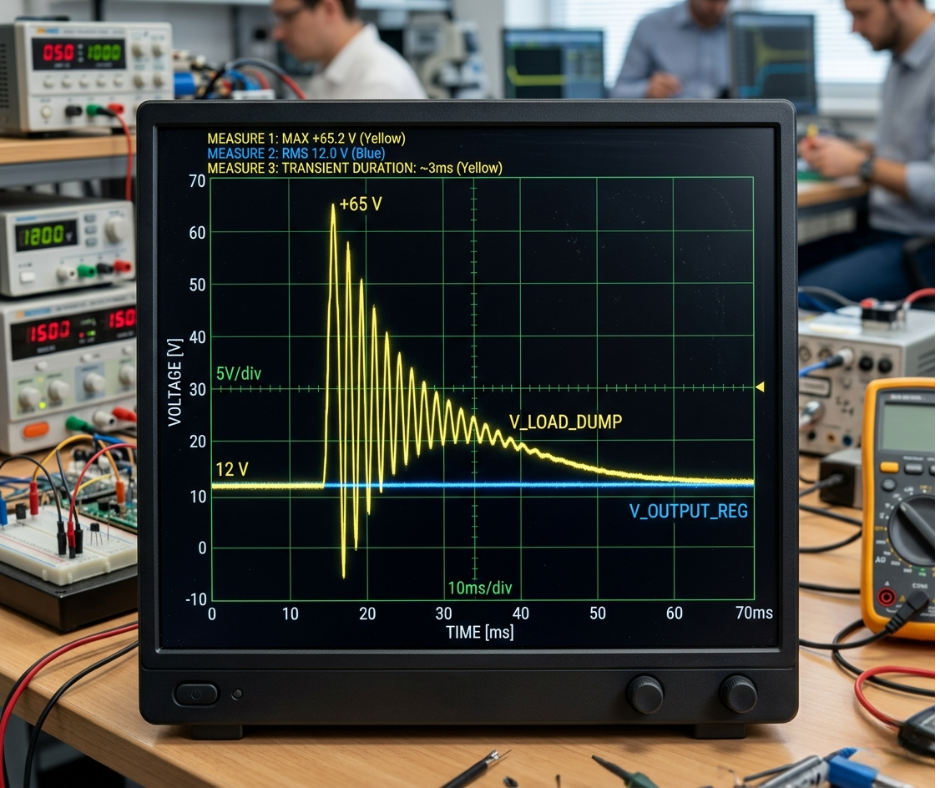
Zabezpieczenie napięcia wejściowego obejmuje pełen zakres napięć pojazdu od 9 V do 36 V. Zabezpieczenie przed przepięciami chroni przed przepięciami występującymi w przypadku odłączenia akumulatora od pracującego alternatora – zdarzenie to generuje skoki napięcia powyżej 60 V, które uszkadzają niezabezpieczone obwody. Diody TVS to teraz układy dwukierunkowe zgodne z normą ISO 7637-3, a nie elementy P6KE6.8A, które uległy awarii w projekcie Sprinter. Wersje przenośne posiadają dodatkowo system zarządzania akumulatorem, umożliwiający bezprzewodowe działanie podczas obchodów pojazdu.
4.3 Ochrona przed wyładowaniami elektrostatycznymi i przepięciami
Każdy pin OBD posiada dwukierunkową ochronę TVS zgodną z normą IEC 61000-4-2 ESD, ferrytami szeregowymi oraz filtrem sygnału wspólnego 100 nF plus 100 pF. Zgodność z normą ISO 7637 jest udokumentowaną normą. Rzeczywista specyfikacja ochrony, którą projektujemy, jest bardziej agresywna — rzeczywiste warunki warsztatowe przewyższają te w standardowych modelach.
5. Oprogramowanie i funkcjonalność diagnostyczna
5.1 Podstawowe funkcje diagnostyczne
• Odczyt i kasowanie kodów DTC we wszystkich obsługiwanych sterownikach ECU — nie tylko w układzie napędowym
• Monitorowanie strumienia danych na żywo z konfigurowalnym wyborem PID i wykresami
• Przechwytywanie danych w trybie zamrożonym w warunkach awarii
• Stan monitora gotowości do testów emisji
• Testy czujnika O2 i test szczelności układu EVAP zgodnie z trybem OBD-II 08
To są funkcje wymagane przepisami. Każdy skaner dostępny na rynku je posiada. Pytanie brzmi, jak niezawodnie działają w całej macierzy pojazdów, a nie czy w ogóle istnieją.
5.2 Funkcje zaawansowane
Kodowanie i programowanie ECU dla obsługiwanych platform — z ważnym zastrzeżeniem. Pełne obejście bramki bezpieczeństwa nie jest dostępne we wszystkich platformach pojazdów luksusowych i elektrycznych z roku 2024 i nowszych. Niektóre moduły przeznaczone dla Mercedesów, BMW i Tesli korzystają z zabezpieczeń opartych na kodzie zmiennym lub certyfikatach, których nie łamiemy. Jest to celowe. Zalecamy klientom korzystanie ze skanera jako narzędzia do wstępnej selekcji i serwisowania, a nie jako zamiennika urządzenia PASSTHRU u dealera, gdy konieczne jest faktyczne programowanie ECU.
W 95% codziennych prac w warsztacie skaner wystarcza. W pozostałych 5% właściwym procesem jest nasze narzędzie diagnostyczne oraz przepustowość J2534 do oprogramowania OEM. Ta uczciwość przyczyniła się do wzrostu liczby zamówień od dystrybutorów, ponieważ przestali oni otrzymywać telefony z irytacją dotyczące roszczeń dotyczących „pełnego dostępu”, które nie zostały zrealizowane w terenie.
• Resetowanie TPMS i programowanie czujnika
• Diagnostyka ABS i SRS z danymi z czujników na żywo
• Resetowanie serwisowe: żywotność oleju, zużycie klocków hamulcowych, rejestracja akumulatora
• Programowanie kluczy tam, gdzie pozwala na to bezpieczeństwo OEM
5.3 Integracja z chmurą
Zdalna diagnostyka za pośrednictwem sesji rejestrowanych w chmurze umożliwia doświadczonemu technikowi przeglądanie danych na żywo i historii usterek z dowolnego miejsca. Generowanie raportów o pojazdach w formacie PDF do dokumentacji serwisowej. Internetowa baza danych pomocy technicznej powiązana z identyfikacją pojazdu skraca czas diagnostyki na nieznanych platformach. Integracja z panelem zarządzania flotą jest dostępna dla operatorów posiadających ponad 10 pojazdów.
„68% naszych zgłoszeń RMA w ciągu 18 miesięcy zostało zgłoszonych jako »nie działa w moim pojeździe z 2024 roku« — a nie jako awaria sprzętu. Brakowało wpisu w bazie danych lub negocjacja klucza bezpieczeństwa zakończyła się niepowodzeniem”.
6. Projektowanie mechaniczne i przemysłowe
6.1 Projekt obudowy
IP54 jako podstawowa specyfikacja, IP65 dla wersji premium. Gumowane wykończenie na wszystkich czterech narożnikach i tylnej powierzchni – nie tylko estetyczne, ale i funkcjonalne. Upadki z progów drzwi pojazdu i krawędzi stołu warsztatowego to najczęstsze przyczyny awarii fizycznych w przypadku zwrotów w terenie. Wewnętrzna rama amortyzująca chroni płytkę drukowaną przed uderzeniami obudowy. Obudowa złącza OBD jest wzmacniana oddzielnie, ponieważ naprężenia złącza spowodowane ciężarem kabla to przyczyna długotrwałej awarii, która ujawnia się po ponad 6,000 cyklach połączeń.

6.2 Projektowanie interfejsu użytkownika
Pojemnościowy ekran dotykowy o przekątnej od 7 do 10 cali, w zależności od SKU. Dostosowanie czułości dotyku do obsługi w rękawicach – ta konfiguracja programowa jest pomijana przez większość producentów OEM, a jej działanie jest natychmiast widoczne w informacjach zwrotnych z warsztatu. Mechanicy stale noszą rękawice nitrylowe. Skaner wymagający użycia gołego palca jest odkładany na bok w ciągu tygodnia. Fizyczne przyciski skrótów do czterech najczęściej używanych funkcji zmniejszają konieczność korzystania z ekranu dotykowego w przypadku obsługi jedną ręką.
6.3 Zarządzanie temperaturą
Obudowy szczelne nie mogą korzystać z chłodzenia aktywnego. Konstrukcja termiczna opiera się na wewnętrznym aluminiowym radiatorze, połączonym z obudową procesora i tylnym panelem obudowy, który działa jak pasywny radiator. Celem projektu było zapewnienie ciągłej stabilności pracy przez 8 godzin. Cel: utrzymanie pełnej wydajności w temperaturze otoczenia 55 stopni Celsjusza, z uwzględnieniem pracy w pobliżu komory silnika.
7. Zgodność i certyfikacja
7.1 Normy motoryzacyjne
Zgodność z normą ISO 7637 obejmuje ochronę przed przepięciami w przewodach zasilających i interfejsie OBD. Norma ta stanowi jednak podstawę, a nie sufit. Awaria Mercedesa Sprintera wynikała z przepięć impulsowych 3a i 3b, które definiuje norma ISO 7637-2 – a których nasz pierwotny projekt nie uwzględnił w rzeczywistym środowisku pojazdu o wysokim poziomie zakłóceń elektromagnetycznych (EMI). Norma ISO 16750 obejmuje obciążenia środowiskowe i elektryczne podzespołów pojazdu. Nasza wewnętrzna specyfikacja projektowa przewyższa te normy, szczególnie w zakresie ochrony przed przepięciami TVS i filtrowania sygnału wspólnego.
• ISO 7637 — odporność na przepięcia i impulsy, ochrona linii zasilającej
• ISO 16750 — wymagania środowiskowe i elektryczne dla podzespołów pojazdów
• SAE J2534-1 i J2534-2 — zgodność z przepisami przejściowymi dla integracji oprogramowania OEM
7.2 Certyfikaty globalne
• Oznakowanie CE — kompatybilność elektromagnetyczna i bezpieczeństwo elektryczne dla rynku europejskiego
• Autoryzacja FCC — działanie bezprzewodowe w Ameryce Północnej
• Zgodność z RoHS — ograniczenia dotyczące substancji niebezpiecznych na rynkach UE i Azji
• Ocena REACH — w razie potrzeby według określonej zawartości substancji chemicznej
Wszystkie certyfikacje są realizowane w ramach programu ODM. Klient otrzymuje w pełni certyfikowany produkt gotowy do wprowadzenia na rynek.
8. Testowanie i walidacja
8.1 Testowanie funkcjonalne
Walidacja pojazdów wielu marek obejmuje naszą flotę składającą się z 50 pojazdów, aktualizowaną kwartalnie o nowe roczniki. Flota obejmuje amerykańskie, europejskie i azjatyckie marki od 1996 roku do chwili obecnej. Testy stabilności komunikacji z ECU wykraczają poza weryfikację protokołu handshake — testy przeprowadzamy w warunkach aktywnego szumu elektrycznego, podczas rozruchu silnika oraz przy innych obciążeniach o wysokim natężeniu prądu pracujących jednocześnie.
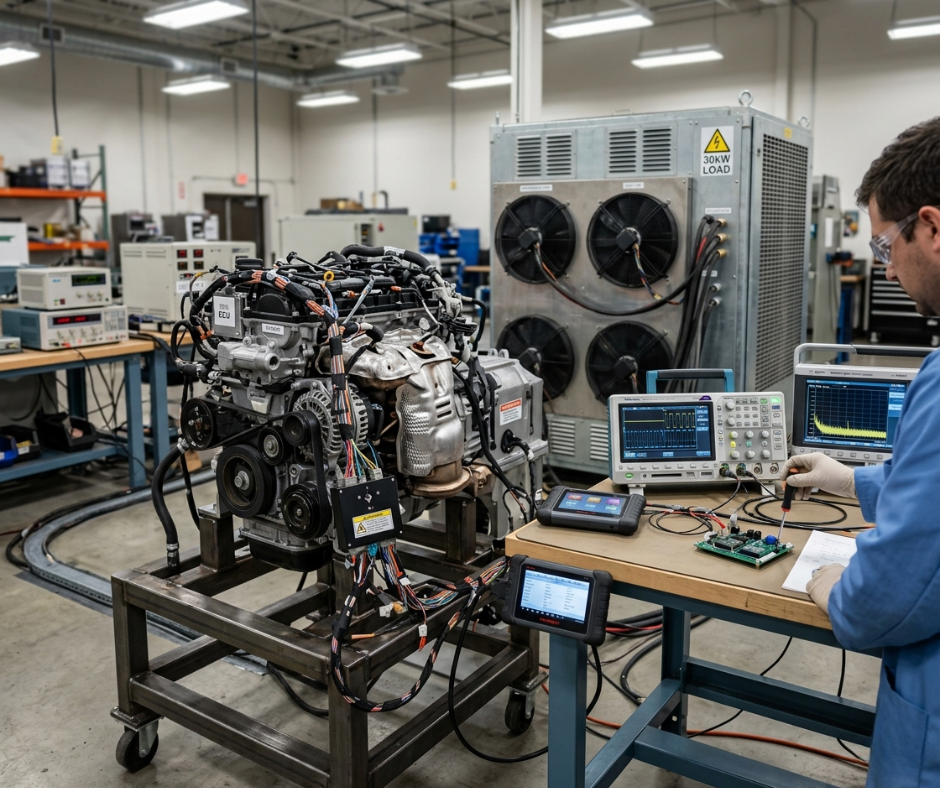
Testowanie w pętli pojazdu (VIN) na pracującym silniku Diesla z obciążeniem 30 kW i wtryskiwaczem z funkcją pomiaru hałasu w szczelinie iskrowej jest teraz obowiązkowe przed zatwierdzeniem odbioru taśmy w każdym cyklu produkcyjnym. Nie wymaga tego żadna norma ISO. Dane z naszych zwrotów terenowych wskazały nam konieczność uwzględnienia tego.
8.2 Badania środowiskowe
• Test upadku z wysokości 1.2–1.5 metra na beton — realistyczna wysokość progu drzwi lub stołu warsztatowego
• Cykle wysokiej i niskiej temperatury: od -10 do 55 stopni Celsjusza z weryfikacją działania w obu skrajnych temperaturach
• Badanie wibracji na stole sześcioosiowym symulującym podłogę warsztatu i transport pojazdów
• Kontrola integralności sygnału magistrali CAN po wibracjach zweryfikowana oscyloskopem — dzwonienie po naprężeniu mechanicznym to tryb awarii, same testy funkcjonalne nie wykonują żadnych testów
8.3 Testowanie produkcyjne
Test obwodowy każdej płytki sprawdza poprawność komponentów i integralność połączeń lutowanych. Test funkcjonalny obwodu weryfikuje każdy protokół komunikacyjny, każdą ścieżkę wejścia/wyjścia oraz regulację zasilania w zależności od temperatury. Kalibracja interfejsu OBD z wykorzystaniem referencyjnego symulatora ECU potwierdza synchronizację protokołu i poziom sygnału przed ostatecznym montażem. Żadna jednostka nie jest wysyłana bez pomyślnego przejścia wszystkich trzech etapów. To między innymi dlatego nasz wskaźnik zwrotów z powodu awarii komunikacji wynosi 0.3%.
9. Produkcja i produkcja masowa
9.1 Optymalizacja DFM
Projektowanie pod kątem produkcji rozpoczyna się od przeglądu schematu, a nie po rozmieszczeniu elementów. Dla każdego kluczowego układu scalonego w projekcie – transceivera, mikrokontrolera, modułu zarządzania energią – dokumentujemy odpowiedni zamiennik przed jego wprowadzeniem na rynek. Problemy z dostępnością komponentów doprowadziły do zamknięcia dwóch programów ODM w latach 2021 i 2022, które nie miały strategii dotyczących zamienników. Wybór układu scalonego o długim cyklu życia pozwala uniknąć sytuacji, w której produkt trafia do produkcji, a główny komponent kończy swój żywot w ciągu 18 miesięcy.
9.2 SMT i montaż
Zautomatyzowane linie SMT do montażu powierzchniowego – bez konieczności ręcznego umieszczania płytek produkcyjnych. Lutowanie falowe złączy przewlekanych, jeśli jest wymagane. Końcowe flashowanie systemu i instalacja oprogramowania są częścią procesu produkcyjnego, a nie etapem po montażu. Każde urządzenie otrzymuje oprogramowanie układowe, bazę danych pojazdów i parametry kalibracji w ramach kontrolowanej, rejestrowanej operacji. Możliwość aktualizacji OTA jest weryfikowana w każdym urządzeniu przed opuszczeniem linii produkcyjnej.
9.3 Zapewnienie jakości
Stuprocentowa kontrola funkcjonalna każdego egzemplarza — bez pobierania próbek. Testy wypalania przeprowadzane są w podwyższonej temperaturze przez określony czas, aby wykryć usterki powodujące śmierć niemowląt przed wysyłką. Końcowa walidacja komunikacji pojazdu łączy każdy egzemplarz z działającym symulatorem ECU i weryfikuje odczyt i kasowanie kodów DTC oraz dane w czasie rzeczywistym we wszystkich obsługiwanych protokołach.
Nasza produkcja 120 000 sztuk w ciągu 18 miesięcy i trzy linie ODM utrzymały wskaźnik zwrotów z powodu awarii komunikacji na poziomie 0.3%. Ta liczba jest wynikiem tego procesu.
10. Rezultaty projektu
10.1 Osiągnięcia techniczne
Stabilna komunikacja z ECU w ponad 95% testowanych modeli pojazdów dzięki ulepszonej diagnostyce — nie tylko standardowemu OBD-II. Czas rozruchu poniżej 10 sekund od zimnego startu do gotowości diagnostycznej. Niezawodny, szybki odczyt danych CAN z prędkością 500 kb/s i 1 Mb/s bez utraty ramek, zgodnie ze specyfikacją odporności na zakłócenia ISO 11898.
Wskaźnik awarii komunikacji w przypadku zwrotów w terenie spadł z 4.2% do 0.3% po zmianach w układzie PCB, ulepszeniu zabezpieczeń przeciwprzepięciowych i wprowadzeniu zabezpieczeń oprogramowania układowego po awarii Sprintera w 2023 roku. W przypadku 120 000 egzemplarzy, to różnica między 5,040 zwrotami gwarancyjnymi a 360.
10.2 Wyniki rynkowe
Skaner został wprowadzony na rynek w Ameryce Północnej i Europie, pozycjonowany jako profesjonalne narzędzie diagnostyczne klasy średniej i wyższej. Wskaźnik powtarzalnych zamówień u dystrybutora wzrósł po tym, jak klient wdrożył transparentną komunikację dotyczącą pokrycia – publikując macierz pokrycia rozszerzoną przez producenta OEM zamiast ogólnych deklaracji procentowych. Skalowalność w celu rozszerzenia diagnostyki pojazdów elektrycznych jest wbudowana w architekturę sprzętową, z interfejsami CAN FD i DoIP na płytce drukowanej dla kolejnej wersji produktu.
11. Pojazdy elektryczne i możliwości przyszłej ekspansji
11.1 Diagnostyka pojazdów elektrycznych
„Gotowość do pojazdów elektrycznych” to obecnie najczęściej nadużywane określenie w diagnostyce samochodowej. Czego więc tak naprawdę wymaga od sprzętu?
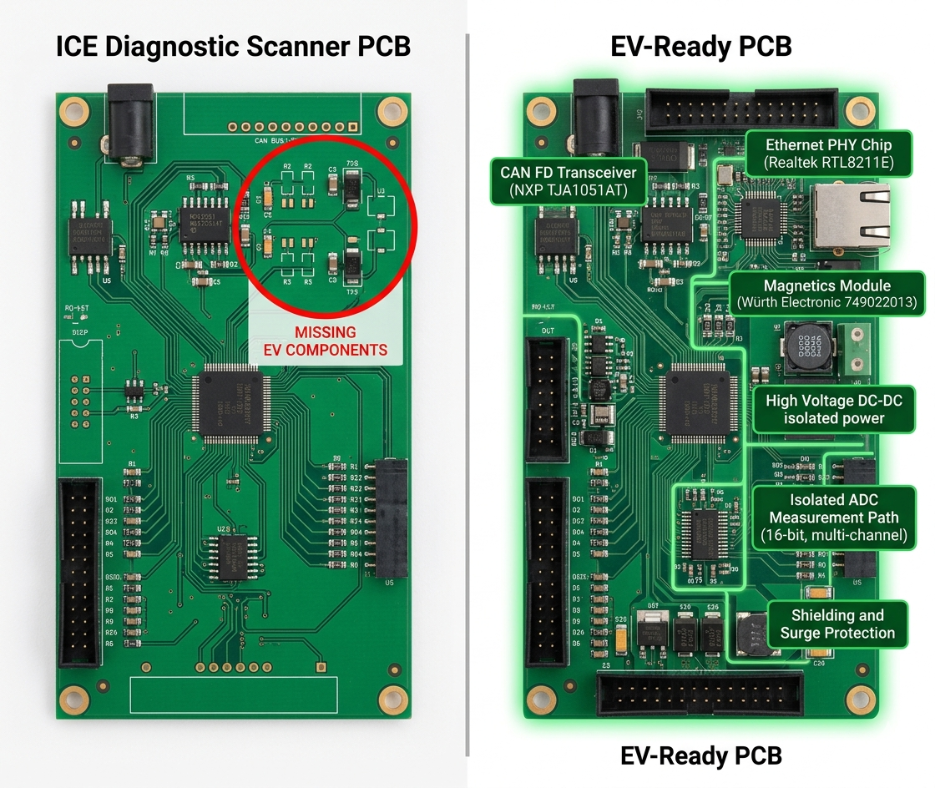
Monitorowanie BMS pakietów akumulatorów o napięciu od 400 do 800 V wymaga dodatkowych przetworników analogowo-cyfrowych o wysokiej rozdzielczości oraz izolowanych ścieżek pomiarowych, których standardowy skaner ICE nie obsługuje. Diagnostyka systemów wysokonapięciowych — awarie izolacji HV, wykrywanie zespawania styczników, sygnały niekontrolowanego wzrostu temperatury — wykorzystuje inne PID-y, inne schematy dostępu bezpieczeństwa i inne tryby awarii niż jakikolwiek inny element podręcznika diagnostyki ICE. Sterowniki EV (EV EV) używają tych samych poleceń UDS co ICE, ale z zupełnie innymi strukturami PID. Bez odpowiedniego sprzętu warstwy fizycznej skaner nie może nawiązać połączenia na wielu platformach. To nie jest problem z bazą danych, lecz problem sprzętowy.
• Monitorowanie napięcia, temperatury i równowagi ogniw BMS
• Wykrywanie usterek izolacji wysokiego napięcia i analiza stanu styczników
• Diagnostyka układu ładowania, w tym protokół komunikacyjny EVSE
• Monitorowanie sygnału wczesnego ostrzegania przed niekontrolowaną temperaturą
11.2 Rozszerzenie DoIP i OTA
Pełna obsługa DoIP — ISO 13400 — wymaga warstwy fizycznej Ethernet, układów magnetycznych i stosu TCP/IP w mikrokontrolerze. To zwiększa koszt BOM o 8–12 dolarów, zanim uwzględni się opracowanie oprogramowania sprzętowego. Obsługa CAN FD dla komunikacji w fazie danych 5 Mb/s to kolejne 2–3 dolary na jednostkę. Całkowity dodatkowy koszt BOM przejścia ze skanera obsługującego wyłącznie ICE na sprzęt gotowy do użytku w pojazdach elektrycznych wynosi od 25 do 40 procent — co przekłada się na 15–25 dolarów na urządzenie.
Kiedy klienci proszą o „dodanie diagnostyki pojazdów elektrycznych”, rozmowa jest bezpośrednia: to nie jest pole wyboru oprogramowania. To sześć miesięcy pracy nad bazą danych dla konkretnego pojazdu, a do tego zmiany sprzętowe, które zwiększają koszt jednostkowy o 15–25 dolarów. Jeśli kupujesz skaner obsługujący pojazdy elektryczne, poproś o listę kontrolną sprzętu DoIP i CAN FD oraz podpisany raport walidacyjny dla co najmniej trzech platform pojazdów elektrycznych przed podpisaniem zamówienia.
„Żądaj listy kontrolnej sprzętu DoIP i CAN FD oraz podpisanego raportu walidacyjnego dla co najmniej trzech platform pojazdów elektrycznych. Nie twierdzeń marketingowych. Podpisanego dokumentu.”
12. Dlaczego warto wybrać nas do rozwoju urządzeń diagnostycznych dla pojazdów?
Nie zaczynamy od najdłuższej listy funkcji. Zaczynamy od danych.
Nasze możliwości projektowania płytek PCB wykraczają poza standardowy układ EMC, obejmując specyficzną dla danego pojazdu odporność na stany przejściowe – sprawdzoną w pojazdach z bankami obciążenia i wtryskiwaczami szumów, a nie tylko symulacją. Awaria Mercedesa Sprintera w 2023 roku doprowadziła do powstania zestawu zasad projektowania, których nie narzuca żadna norma ISO, i które zmniejszyły wskaźnik zgłaszanych awarii komunikacji z 4.2 do 0.3%. Ta wiedza jest obecna w każdym projekcie, który obecnie tworzymy.
Inżynieria sprzętowa klasy motoryzacyjnej oznacza komponenty AEC-Q100, zgodność z normami ISO 7637 i 16750 jako punkt wyjścia oraz udokumentowane strategie wymiany komponentów przed ich wycofaniem. Różnica między skanerem, który przejdzie certyfikację, a takim, który przetrwa 200 000 cykli połączeń w rzeczywistych warsztatach, nie jest widoczna w specyfikacji technicznej.
Rozwój oprogramowania wbudowanego obejmuje pełen zakres usług: oprogramowanie sprzętowe protokołów, zarządzanie bazą danych ECU, infrastrukturę aktualizacji OTA oraz integrację z chmurą. Traktujemy cykl aktualizacji baz danych jako element dostarczalny z umową SLA — maksymalnie 45 dni od premiery nowego modelu do zatwierdzenia wdrożenia bazy danych.
Kompleksowa usługa OEM i ODM oznacza, że klient otrzymuje gotowy, certyfikowany produkt gotowy do wprowadzenia na rynek. Certyfikaty CE, FCC i RoHS są objęte programem. Produkcja masowa z 100-procentową kontrolą funkcjonalną. Pełna walidacja komunikacji z pojazdem dla każdego egzemplarza przed wysyłką.
I informujemy klientów, czego nasze narzędzie nie potrafi. Omija ograniczenia bramki bezpieczeństwa na niektórych platformach z roku 2024 i nowszych. Hybrydowy przepływ pracy wymagany do programowania ECU w tych pojazdach. Rzeczywisty koszt sprzętu gotowego do obsługi pojazdów elektrycznych. Ta transparentność nie jest wadą procesu sprzedaży. Nasze dane dotyczące powtarzających się zamówień wskazują na coś wręcz przeciwnego.
| 50 +Flota walidacji pojazdów | 45 DniMaksymalna aktualizacja roku modelowego SLA | 0.3%Współczynnik awaryjności komunikacji terenowej | 100%Kontrola funkcjonalna na jednostkę |
Wszystkie dane pochodzą z wewnętrznych rejestrów produkcyjnych, rejestrów RMA i danych z walidacji terenowej dla ponad 200 000 wysłanych egzemplarzy. Dane klientów i marek są anonimizowane zgodnie z umowami ODM.



