FALLSTUDIE
Eine technische Fallstudie zu einem Kfz-Diagnosescanner, basierend auf über 200,000 ausgelieferten Einheiten verschiedener ODM-Linien – mit Einblicken in reale Architekturentscheidungen, einen Feldausfall, der unsere PCB-Regeln neu geschrieben hat, und die Daten, die tatsächlich zu Rücksendungen führen.
| 200k+Ausgelieferte Einheiten | 4.2 % → 0.3 %Kommunikationsausfallrate | 68%RMAs: Fehlende OEM-Daten | 40-60%Verbesserte Echtzeitabdeckung |
1. Projektübersicht
1.1 Kundenhintergrund
Der Kunde war ein Hersteller von Kfz-Serviceausrüstung mit einer etablierten Einsteiger-Produktlinie für OBD-Geräte – beispielsweise ELM327-basierte Adapter und einfache Codelesegeräte. Er wollte in den Bereich professioneller Multisystem-Scanner aufsteigen.
Zielmarkt: unabhängige Reparaturwerkstätten, Fuhrparkwartungsbetriebe und Vertragswerkstätten. Von Anfang an im Fokus standen Nordamerika und Europa, Asien war als Zielmarkt in einer zweiten Phase vorgesehen.

Die Lücke, die sie schließen wollten, war real. Einsteigergeräte lesen generische Antriebsstrangcodes. Professionelle Werkstätten benötigen ABS, SRS, Getriebe, TPMS, bidirektionale Steuerungen und Live-ECU-Daten für Dutzende von Marken. Dieser Sprung ist kein Firmware-Update. Es handelt sich um ein komplett anderes Hardware- und Softwareprogramm.
Relevante Artikeln: Fallstudie zu robusten Tablets
1.2 Projektziele
• Vollständige OBD-II-Konformität als Mindestanforderung, nicht als Höchstgrenze
• Unterstützung mehrerer Protokolle über CAN, LIN und FlexRay
• Echtzeit-ECU-Datenanalyse mit geringer Latenz
• Drahtlose Verbindung für Cloud-Synchronisierung und Ferndiagnose
• Robuste Industriequalität für Werkstattumgebungen
• Serienreifes Design, für die globale Zertifizierung freigegeben
• Klarer Upgrade-Pfad für die EV-Diagnostik ohne vollständige Hardware-Neuentwicklung
2. Herausforderungen der Branche bei der Entwicklung von Kfz-Diagnosewerkzeugen
2.1 Multiprotokoll-Kompatibilität
Die Aussage „Über 95 % der Fahrzeugmodelle werden unterstützt“ findet sich auf jeder Scannerverpackung. Nachdem wir über 200,000 Geräte – darunter ELM327-Klone und vollwertige Multiprotokoll-Tablets – ausgeliefert haben, können wir Ihnen genau sagen, was diese Zahl verbirgt.
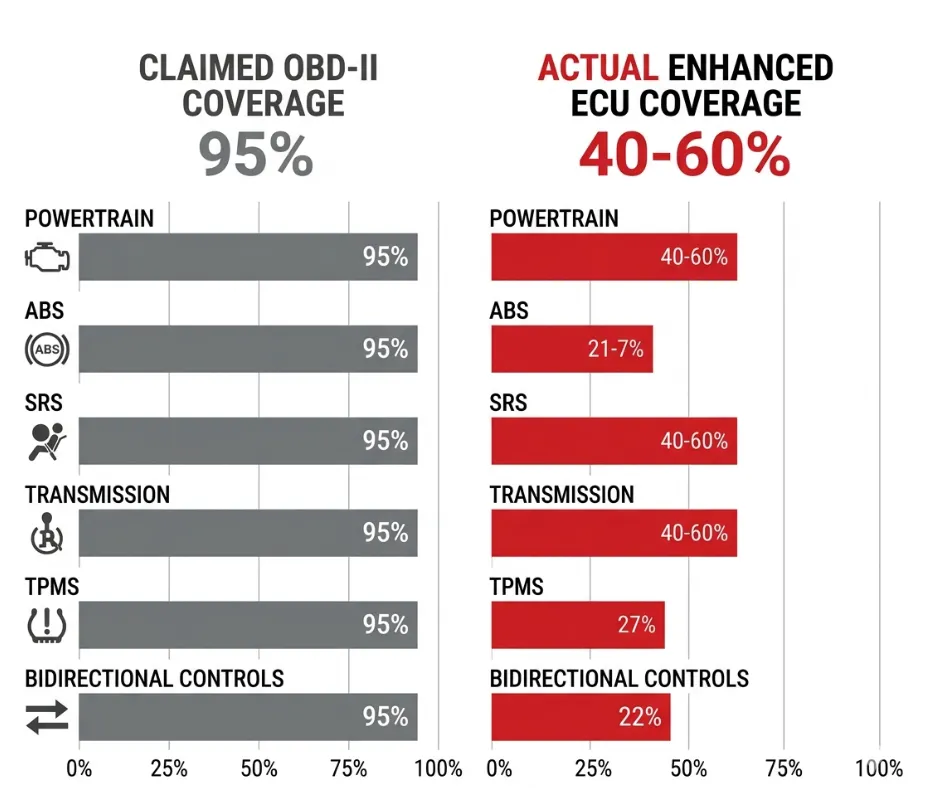
Es deckt ausschließlich die gesetzlich vorgeschriebene OBD-II-Konformität ab – SAE J1979 und ISO 15031 Modi 01 bis 0A auf fünf älteren Protokollen: ISO 9141-2, ISO 14230-4 KWP2000, SAE J1850 PWM und VPW sowie ISO 15765-4 CAN mit 250 und 500 kbps. Das Gerät liest somit generische Antriebsstrang-PIDs, den MIL-Status und Freeze-Frame-Daten von allen US-Fahrzeugen ab Baujahr 1996, die die gesetzlichen Mindestanforderungen erfüllen.
Nicht abgedeckt sind: herstellerdefinierte PIDs, Zugriff auf ABS-/SRS-/Getriebe-/TPMS-Module, bidirektionale Steuerungen, Anpassungen oder Sicherheitszugriffsschlüssel. Fahrzeuge ab Baujahr 2018, die UDS über CAN oder CAN FD nutzen, vergrößern die Lücke zusätzlich. In unserem eigenen Validierungstest mit 50 Fahrzeugen erreichten Scanner, die eine Basiskompatibilität von 95 % angaben, bei erweiterten Daten für Fahrzeuge, die nicht für den US-Markt bestimmt sind, im Durchschnitt nur 40 bis 60 %.
| Die Beschaffungsingenieure sollten folgende Kennzahlen fordern: eine detaillierte, OEM-erweiterte Abdeckungsmatrix in Excel, aufgeschlüsselt nach Marke, Modell und Baujahr – mit Angabe der unterstützten erweiterten DTCs pro Steuergerät, CAN-FD- und DoIP-Status, J2534-Passthrough-Fähigkeit und Datenbankaktualisierungshäufigkeit. Alles andere ist Marketing. |
2.2 Stabilität der Steuergerätekommunikation
Die Fahrzeugelektrik ist rau. Common-Rail-Diesel-Einspritzdüsen, Schaltgeräusche der Lichtmaschine und Lastabwurfereignisse beim Anlassen des Motors erzeugen Spannungsspitzen, die bei Prüfstandsläufen nicht erfasst werden können. Die Spannung am OBD-Anschluss schwankt je nach Fahrzeug, Ladezustand und anderen angeschlossenen Geräten zwischen 9 V und 36 V. Verpolungsschutz ist daher unerlässlich – er ist Bestandteil der Garantie.
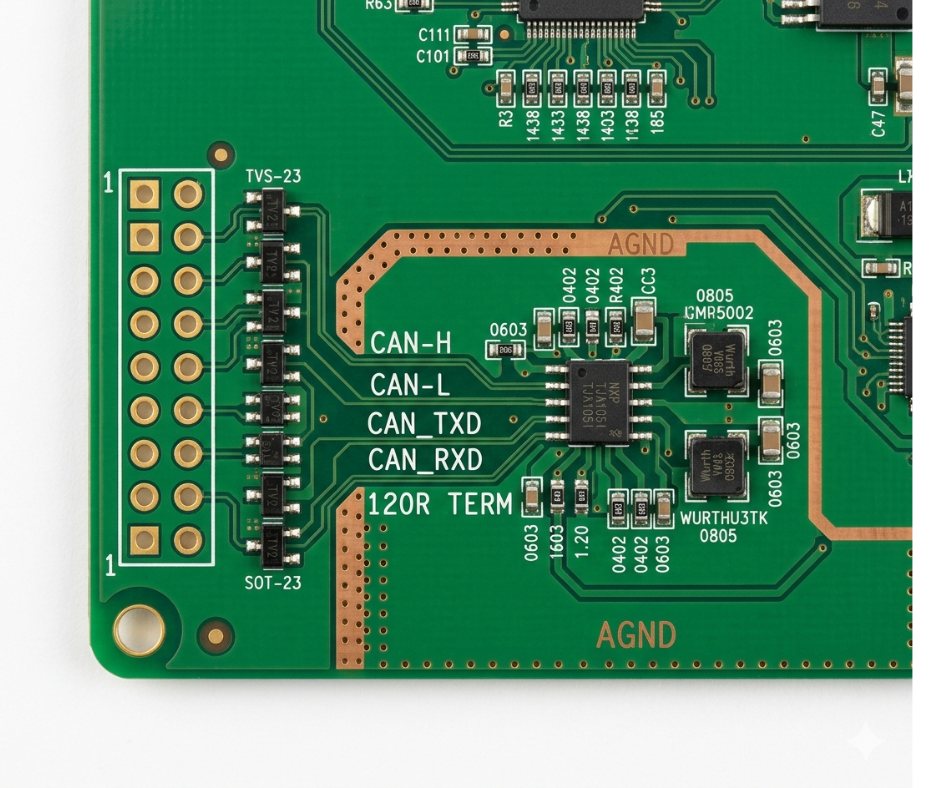
Wir haben das auf die harte Tour gelernt. Ein ODM-Projekt aus dem Jahr 2023 mit einem GD32F103 SoC und einem TJA1050 CAN-Transceiver bestand alle Labortests – einwandfreie Augendiagramme, kein Paketverlust bei 500 kbit/s. Der erste Ausfall im Feld trat in einer europäischen Werkstatt an einem Mercedes Sprinter Diesel (Baujahr 2019) auf. Das Gerät verlor zeitweise die Verbindung zum Bus, gab den Fehlercode U0100 (Kommunikationsverlust) aus und verursachte fehlerhafte Fehlercode-Löschungen. Ursache: zu kleine TVS-Dioden und fehlende Gleichtakt-Drosseln an CANH und CANL. Spannungsspitzen gemäß ISO 7637-2 Impuls 3a und 3b – bis zu ±150 V beim Anlassen des Motors – wurden direkt über den OBD-Anschluss eingekoppelt. Der Transceiver überstand die Labortests, fiel aber nach etwa 200 Betriebsstunden im Feld aus.
2.3 Komplexität der Softwaredatenbank
Unsere RMA-Daten von 120,000 Geräten über 18 Monate zeigen, dass 68 Prozent der Rücksendungen mit der Begründung „Funktioniert nicht auf meinem XYZ-Modelljahr 2024“ eingereicht werden – selbst wenn die Hardware die korrekten Protokolle unterstützt. Der OEM-spezifische Datenbankeintrag fehlte oder die Aushandlung des Sicherheits-Seeds schlug unbemerkt fehl. Geräte mit seltenen OTA-Datenbankaktualisierungen weisen bei der Einführung eines neuen Modelljahres Rücklaufquoten von 18 bis 22 Prozent auf. Dies ist ein Geschäftsproblem, kein Hardwareproblem.
2.4 Robuste Werkstattumgebung
Mechaniker gehen nicht gerade zimperlich mit Diagnosetablets um. Sie lassen die Scanner während Lichtmaschinentests, Zündzyklen und Starthilfen angeschlossen. Werkzeuge fallen aus den Türschwellern, werden mit Öl bespritzt und über Nacht in kalten Transportern liegen gelassen. Der Betriebstemperaturbereich von -10 bis 55 Grad Celsius ist keine Angabe im Datenblatt – er entspricht dem tatsächlichen Temperaturbereich, dem ein Scanner zwischen einem Januarmorgen auf einem Parkplatz in Minnesota und einem Motorraum im texanischen Sommer ausgesetzt ist.
3. Entwurf der Systemarchitektur
3.1 Kernverarbeitungsplattform
Der Hauptanwendungsprozessor basiert auf einem ARM Cortex-A-Prozessor und läuft mit eingebettetem Android oder Linux. Android bietet Vorteile hinsichtlich der Entwicklungsgeschwindigkeit der Benutzeroberfläche und der ausgereiften OTA-Infrastruktur. Linux ist für latenzempfindliche Diagnoseprozesse besser geeignet. Ein dedizierter Mikrocontroller (MCU) steuert die Kommunikationsschicht separat. Dadurch wird die Latenz reduziert, die Fehlerisolierung verbessert und verhindert, dass ein Softwareabsturz laufende Steuergerätesitzungen unterbricht. Die angestrebte Bootzeit vom Kaltstart bis zum diagnosebereiten Zustand lag unter 10 Sekunden.
3.2 Fahrzeugkommunikationsschnittstelle
Der 16-polige OBD-II-Anschluss bildet den Zugangspunkt, doch die dahinterliegende physikalische Schicht ist der Schwachpunkt der meisten Designs. Die Architektur verwendet High-Speed- und Low-Speed-CAN-Transceiver, einen geeigneten K- und L-Leitungstreiber-IC – keine diskreten Transistoren –, einen LIN-Transceiver und optional DoIP über Ethernet für Plattformen ab 2020.
Die Wahl des K-Leitungstreibers ist wichtiger als es zunächst scheint. Günstige diskrete Implementierungen bieten nicht die 12-V-Toleranz, die Anstiegsgeschwindigkeitsregelung und die Übertemperaturabschaltung eines dedizierten ICs wie dem L9637. Bei älteren asiatischen und europäischen Steuergeräten, die die Leitung während der Initialisierung auf 12 V ziehen, äußert sich dies in sporadischen Kommunikationsausfällen, die im Feld kaum zu debuggen sind. Die DoIP-Unterstützung erfordert einen Ethernet-PHY, Magnetik und einen TCP/IP-Stack auf dem Mikrocontroller – ein Mehraufwand von 8 bis 12 US-Dollar, ohne die Komplexität der Firmware zu berücksichtigen. Es handelt sich also nicht um eine einfache Software-Option.
3.3 Wireless Connectivity
• WLAN 5 und 6 für schnelle Datenbanksynchronisierung und Cloud-Sitzungsprotokollierung
• Bluetooth 5.0 für die Kopplung mit dem Werkstatt-PC und die Fernanzeige
• Optionales 4G-LTE-Modul für Cloud-Diagnose von Fahrzeugen im Außendienst
• Das LTE-Modul unterstützt außerdem die Fernwartung durch Techniker mit Live-Datenstromübertragung.
3.4 Lagerung und Sicherheit
Der eMMC-Speicher reicht je nach SKU-Variante von 32 bis 128 GB. Allein die Fahrzeugdatenbank mit vollständiger OEM-spezifischer Abdeckung für US-amerikanische, europäische und asiatische Marken umfasst über 20 GB – ohne Protokolle und Sitzungsdatensätze. Die sichere Firmware-Update-Architektur nutzt signierte Update-Pakete, eine verifizierte Boot-Kette und verschlüsselte OTA-Kanäle. Benutzerauthentifizierung und verschlüsselte Kommunikationskanäle sind Standard für jedes professionelle Tool, das in Flotten- oder Händlerumgebungen eingesetzt wird.
4. Leiterplatten- und Hardwareentwicklung
4.1 Mehrlagiges Leiterplattendesign
Der Unfall des Mercedes Sprinter im Jahr 2023 hat unsere Leiterplattenrichtlinien grundlegend verändert. Die Nachuntersuchung ergab Überschwingen auf den CAN-Leitungen mit über 2 Vpp – ein direkter Verstoß gegen ISO 11898-2 – verursacht durch unzureichende Gleichtaktfilterung und mangelhafte Trennung der Massefläche. Wir haben daraufhin einen 6- bis 8-lagigen Aufbau mit einer separaten analogen Massefläche unter dem Transceiver-Bereich eingeführt. Digitale Leiterbahnen kreuzen den CAN-Bus-Bereich nicht. Die Durchkontaktierungen sind alle 5 mm um den analogen Bereich angeordnet. Die EMV-Anforderungen werden von Anfang an berücksichtigt und nicht erst nachträglich geprüft.
Durchgehend Komponenten in Automobilqualität: erweiterter Temperaturbereich, AEC-Q100-Qualifizierung (wo zutreffend), Auswahl langlebiger ICs mit dokumentierter Ersatzstrategie vor der Fertigung. Die physikalische Schicht verwendet ein dediziertes Protokoll-ASIC-Frontend mit programmierbarer Terminierungs- und Impulsunterdrückungslogik.
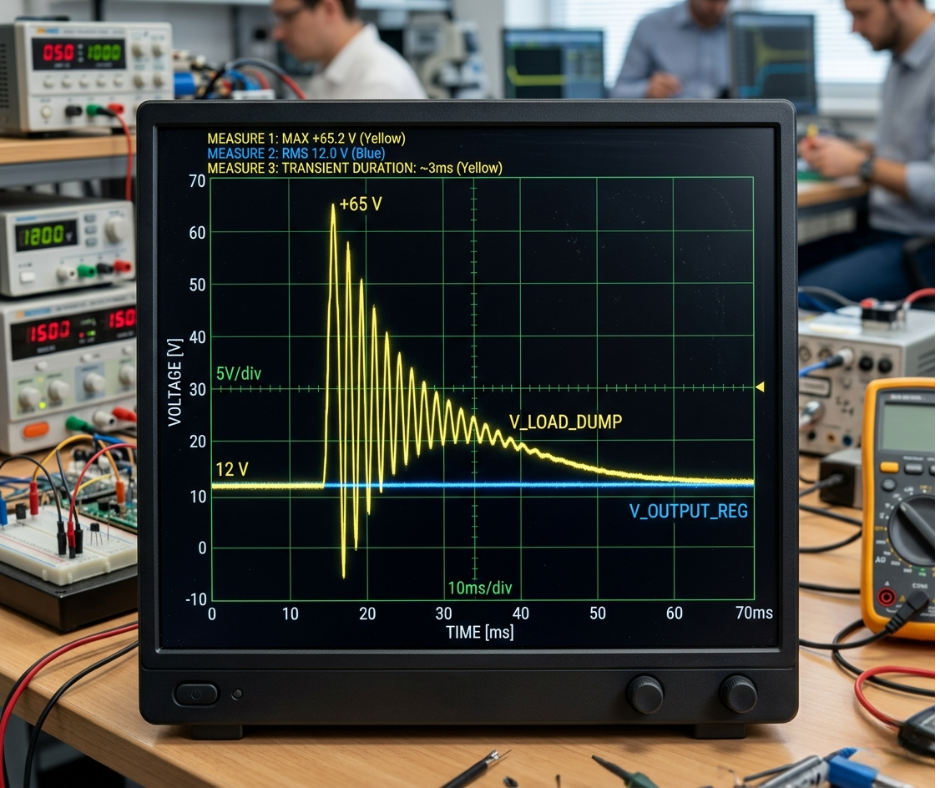
4.2 Energiemanagement-Design
Der Eingangsspannungsschutz deckt den gesamten Fahrzeugspannungsbereich von 9 V bis 36 V ab. Der Lastabwurfschutz verhindert Spannungsspitzen, die beim Trennen der Batterie von der laufenden Lichtmaschine auftreten – dabei entstehen Spannungsspitzen über 60 V, die ungeschützte Stromkreise zerstören können. Die TVS-Dioden sind nun bidirektionale Arrays gemäß ISO 7637-3 und nicht mehr die im Sprinter-Projekt versagten P6KE6.8A-Bauteile. Tragbare Varianten verfügen zusätzlich über ein Batteriemanagementsystem für den kabellosen Betrieb bei Fahrzeugkontrollen.
4.3 ESD- und Transientenschutz
Jeder OBD-Pin verfügt über einen bidirektionalen TVS-Schutz gemäß IEC 61000-4-2 ESD, Serienferriten und eine Gleichtaktfilterung von 100 nF plus 100 pF. Die Einhaltung der Norm ISO 7637 ist dokumentiert. Die von uns entwickelten Schutzspezifikationen sind jedoch noch strenger – die realen Bedingungen in Werkstätten übertreffen die Anforderungen der Standardmodelle.
5. Software- und Diagnosefunktionen
5.1 Kerndiagnosefunktionen
• Fehlercodes (DTCs) aller unterstützten Steuergeräte lesen und löschen – nicht nur des Antriebsstrangs
• Live-Datenstromüberwachung mit konfigurierbarer PID-Reglerauswahl und grafischer Darstellung
• Erfassung von Standbilddaten bei Fehlerzuständen
• Bereitschaftsüberwachungsstatus für Emissionsprüfungen
• O2-Sensortests und EVAP-System-Lecktests gemäß OBD-II-Modus 08
Dies sind die gesetzlich vorgeschriebenen Funktionen. Jeder auf dem Markt erhältliche Scanner verfügt über sie. Die Frage ist nicht, ob sie überhaupt vorhanden sind, sondern wie zuverlässig sie die gesamte Fahrzeugabdeckung abdecken.
5.2 Erweiterte Funktionen
ECU-Codierung und -Programmierung für unterstützte Plattformen – mit einem wichtigen Hinweis: Die vollständige Umgehung der Sicherheitsgateways ist nicht für alle Luxus- und Elektrofahrzeugplattformen ab 2024 verfügbar. Einige Mercedes-, BMW- und Tesla-spezifische Module verwenden Rolling-Code- oder zertifikatsbasierte Sicherheitsmechanismen, die wir nicht knacken können. Dies ist beabsichtigt. Wir empfehlen unseren Kunden, den Scanner als Diagnose- und Servicewerkzeug zu verwenden und nicht als Ersatz für ein Händler-Passthrough-Gerät, wenn eine tatsächliche ECU-Programmierung erforderlich ist.
Für 95 Prozent der täglichen Werkstattarbeiten ist der Scanner ausreichend. Für die verbleibenden 5 Prozent ist unser Diagnosetool in Kombination mit der J2534-Schnittstelle zur OEM-Software der optimale Workflow. Diese Transparenz hat zu mehr Folgebestellungen bei unseren Händlern geführt, da sie keine verärgerten Anrufe mehr wegen angeblicher „voller Zugriffsrechte“ erhalten, die in der Praxis nicht eingehalten werden können.
• TPMS-Reset und Sensorprogrammierung
• ABS- und SRS-Diagnose mit Live-Sensordaten
• Service-Resets: Ölwechselintervall, Bremsbelagverschleiß, Batterieregistrierung
• Schlüsselprogrammierung, sofern die OEM-Sicherheit dies zulässt
5.3 Cloud-Integration
Die Ferndiagnose über cloudbasierte Sitzungen ermöglicht es erfahrenen Technikern, Live-Daten und Fehlerhistorie von jedem beliebigen Ort aus einzusehen. Fahrzeugberichte werden im PDF-Format für die Servicedokumentation erstellt. Eine mit der Fahrzeugidentifikation verknüpfte Online-Datenbank für technischen Support verkürzt die Diagnosezeit auf unbekannten Plattformen. Für Betreiber mit mehr als 10 Fahrzeugen ist die Integration in ein Flottenmanagement-Dashboard verfügbar.
„68 % unserer RMA-Anfragen innerhalb von 18 Monaten wurden mit der Begründung ‚Funktioniert nicht mit meinem Fahrzeug des Modelljahres 2024‘ eingereicht – nicht aufgrund eines Hardwarefehlers. Der Datenbankeintrag fehlte oder die Aushandlung des Sicherheitsschlüssels schlug stillschweigend fehl.“
6. Maschinenbau und Industriedesign
6.1 Gehäusekonstruktion
IP54 als Basisschutzart, IP65 für die Premium-Variante. Gummierte Ummantelung an allen vier Ecken und der Rückseite – nicht aus ästhetischen, sondern aus funktionalen Gründen. Stürze von Fahrzeugtürschwellen und Werkbankkanten sind die häufigste Ursache für physische Ausfälle bei Rücksendungen. Ein interner stoßdämpfender Rahmen entkoppelt die Leiterplattenbaugruppe von Gehäuseaufprallkräften. Das Gehäuse des OBD-Steckers ist separat verstärkt, da die Belastung des Steckers durch das Kabelgewicht ein langfristiger Ausfallgrund ist, der sich nach über 6,000 Steckzyklen bemerkbar macht.

6.2 Gestaltung der Benutzeroberfläche
Je nach Modellvariante verfügt der Touchscreen über eine Diagonale von 7 bis 10 Zoll. Die Bedienung ist handschuhfreundlich – eine Softwarekonfiguration, die die meisten OEMs vernachlässigen, was sich aber sofort im Werkstattfeedback bemerkbar macht. Mechaniker tragen ständig Nitrilhandschuhe. Ein Scanner, der die Eingabe mit bloßen Fingern erfordert, wird daher innerhalb einer Woche nicht mehr verwendet. Physische Schnellzugriffstasten für die vier häufigsten Funktionen reduzieren die Abhängigkeit vom Touchscreen bei einhändiger Bedienung.
6.3 Wärmemanagement
Geschlossene Gehäuse können nicht aktiv gekühlt werden. Das Wärmedesign basiert auf einem internen Aluminium-Kühlkörper, der mit dem Prozessorgehäuse verklebt und mit der Gehäuserückwand verbunden ist. Dieser dient als passiver Kühlkörper. Kontinuierlicher Betrieb über eine 8-Stunden-Schicht war das Entwicklungsziel. Die volle Leistungsfähigkeit soll bei einer Umgebungstemperatur von 55 °C erhalten bleiben, auch bei Einsatz in der Nähe des Motorraums.
7. Konformität und Zertifizierung
7.1 Automobilnormen
Die Einhaltung von ISO 7637 umfasst den Schutz vor Überspannungen in den Versorgungsleitungen und der OBD-Schnittstelle. Der Standard stellt jedoch eine Mindestanforderung dar, keine Obergrenze. Der Ausfall des Mercedes Sprinter wurde durch die in ISO 7637-2 definierten Impuls-3a- und -3b-Überspannungen verursacht – Überspannungen, die in unserer ursprünglichen Konstruktion in einer realen Fahrzeugumgebung mit hohen elektromagnetischen Störungen unterschätzt wurden. ISO 16750 behandelt Umgebungs- und elektrische Lasten für Fahrzeugkomponenten. Unsere interne Konstruktionsspezifikation übertrifft diese Standards, insbesondere hinsichtlich der TVS-Schutzwerte und der Gleichtaktfilterung.
• ISO 7637 – Störfestigkeit gegen Überspannungen und Impulse, Schutz der Versorgungsleitung
• ISO 16750 – Umwelt- und elektrische Anforderungen an Fahrzeugkomponenten
• SAE J2534-1 und J2534-2 – Durchleitungskonformität für die OEM-Softwareintegration
7.2 Globale Zertifizierungen
• CE-Kennzeichnung – Elektromagnetische Verträglichkeit und elektrische Sicherheit für den europäischen Markt
• FCC-Zulassung – Mobilfunkbetrieb in Nordamerika
• RoHS-Konformität – Beschränkungen für gefährliche Stoffe auf den EU- und asiatischen Märkten
• REACH-Bewertung – pro spezifischem Chemikaliengehalt, sofern erforderlich
Alle Zertifizierungen werden im Rahmen des ODM-Programms abgewickelt. Der Kunde erhält ein vollständig zertifiziertes Produkt, das sofort marktreif ist.
8. Tests und Validierung
8.1 Funktionsprüfung
Die Validierung von Fahrzeugen verschiedener Marken erfolgt an unserer Flotte von 50 Fahrzeugen, die vierteljährlich aktualisiert wird, um neue Modelljahre zu berücksichtigen. Die Flotte umfasst US-amerikanische, europäische und asiatische Marken von 1996 bis heute. Die Stabilitätsprüfung der Steuergerätekommunikation geht über die Überprüfung des Protokoll-Handshakes hinaus – wir testen unter aktivem elektrischem Rauschen, während des Anlassvorgangs und bei gleichzeitigem Betrieb anderer Hochstromlasten.
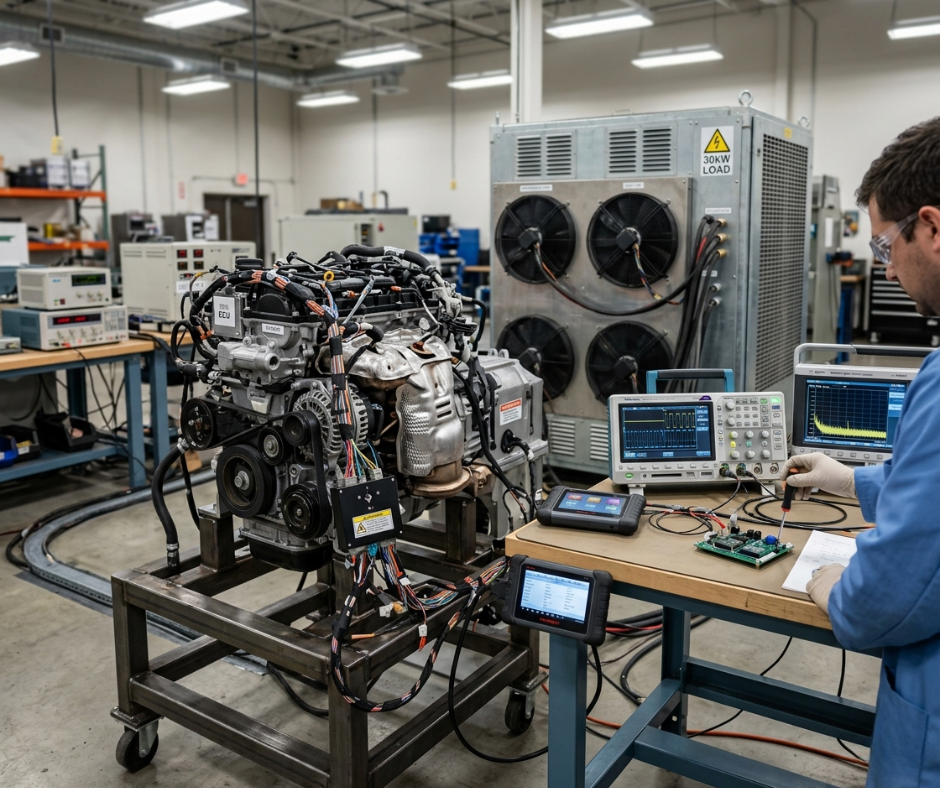
Fahrzeug-im-Kreislauf-Tests mit einem laufenden Dieselmotor, einer 30-kW-Lastbank und einem Funkenstrecken-Rauschinjektor sind ab sofort vor der Freigabe jedes Produktionslaufs obligatorisch. Dies ist in keiner ISO-Norm vorgeschrieben. Unsere Feldmessdaten haben uns jedoch dazu veranlasst, diese Maßnahme einzuführen.
8.2 Umwelttests
• Falltest aus 1.2 bis 1.5 Metern Höhe auf Beton – realistische Höhe einer Türschwelle oder Werkbank
• Zyklische Temperaturwechsel: -10 bis 55 Grad Celsius mit Funktionsprüfung an beiden Extrempunkten
• Schwingungsprüfung auf einem Sechs-Achs-Tisch zur Simulation von Werkstattboden und Fahrzeugtransport
• Oszilloskopisch verifizierte CAN-Bus-Signalintegritätsprüfung nach Vibration – Nachklingeln nach mechanischer Belastung ist ein Fehlermodus, der bei Funktionstests allein nicht erkannt wird.
8.3 Produktionstests
Der In-Circuit-Test jeder Platine prüft die Bauteilbestückung und die Lötstellen. Der Funktionstest verifiziert jedes Kommunikationsprotokoll, jeden I/O-Pfad und die Spannungsregelung bei unterschiedlichen Temperaturen. Die OBD-Schnittstellenkalibrierung mit einem Referenz-ECU-Simulator bestätigt das Protokoll-Timing und die Signalpegel vor der Endmontage. Kein Gerät wird ausgeliefert, bevor es alle drei Testphasen bestanden hat. Dies ist mit ein Grund dafür, dass unsere Rücklaufquote aufgrund von Kommunikationsfehlern bei lediglich 0.3 Prozent liegt.
9. Fertigung und Massenproduktion
9.1 DFM-Optimierung
Die fertigungsgerechte Konstruktion beginnt bereits bei der Schaltplanprüfung, nicht erst nach dem Layout. Für jeden kritischen IC im Design – Transceiver, MCU, Power-Management – dokumentieren wir vor der Tape-out-Phase einen qualifizierten Ersatz. Probleme mit der Komponentenverfügbarkeit führten 2021 und 2022 zum Scheitern zweier ODM-Projekte, die keine Ersatzstrategien entwickelt hatten. Die Auswahl von ICs mit langer Lebensdauer verhindert, dass ein Produkt in Produktion geht und die wichtigste Komponente innerhalb von 18 Monaten das Ende ihrer Lebensdauer erreicht.
9.2 SMT und Montage
Automatisierte SMT-Linien für die gesamte Oberflächenmontage – keine manuelle Bestückung der Leiterplatten. Durchsteckverbinder werden bei Bedarf per Wellenlöten hergestellt. Das abschließende System-Flashing und die Softwareinstallation erfolgen im Produktionsprozess und nicht erst nach der Montage. Jedes Gerät erhält die Produktions-Firmware, die Fahrzeugdatenbank und die Kalibrierungsparameter in einem kontrollierten, protokollierten Vorgang. Die OTA-Update-Fähigkeit wird bei jedem Gerät vor Verlassen der Produktionslinie geprüft.
9.3 Qualitätssicherung
Jede Einheit wird einer 100-prozentigen Funktionsprüfung unterzogen – keine Stichproben. Im Rahmen eines Burn-in-Tests wird jede Einheit über einen definierten Zeitraum erhöhter Temperatur ausgesetzt, um Ausfälle in der Anfangsphase vor dem Versand zu erkennen. Die abschließende Validierung der Fahrzeugkommunikation verbindet jede Einheit mit einem Live-ECU-Simulator und überprüft das Lesen, Löschen und die Live-Daten von Fehlercodes (DTCs) über alle unterstützten Protokolle hinweg.
Unsere Produktion von 120,000 Einheiten über 18 Monate und drei ODM-Linien erreichte eine Kommunikationsausfallrate von lediglich 0.3 Prozent. Dies ist das Ergebnis dieses Prozesses.
10. Projektergebnisse
10.1 Technische Errungenschaften
Stabile Steuergerätekommunikation bei über 95 % der getesteten Fahrzeugmodelle mit erweiterter Diagnose – nicht nur generisches OBD-II. Startzeit unter 10 Sekunden vom Kaltstart bis zur Diagnosebereitschaft. Zuverlässiges Auslesen von CAN-Daten mit hoher Geschwindigkeit (500 kbit/s und 1 Mbit/s) ohne Frameverluste gemäß ISO 11898-Norm für Störfestigkeit.
Die Ausfallrate aufgrund von Kommunikationsproblemen bei Rücksendungen aus dem Feld sank nach den Änderungen am Leiterplattenlayout, den Verbesserungen des Überspannungsschutzes und den nach dem Sprinter-Defekt von 2023 eingeführten Firmware-Sicherheitsvorkehrungen von 4.2 Prozent auf 0.3 Prozent. Bei 120,000 Einheiten entspricht dies einem Unterschied von 5,040 Garantierücksendungen gegenüber 360.
10.2 Marktergebnisse
Der Scanner wurde in Nordamerika und Europa als professionelles Diagnosegerät der mittleren bis oberen Preisklasse eingeführt. Die Wiederkaufsrate der Distributoren verbesserte sich, nachdem der Kunde auf transparente Kommunikation zur Abdeckung umgestellt hatte – er veröffentlichte die vom OEM optimierte Abdeckungsmatrix anstelle allgemeiner Prozentangaben. Die Hardwarearchitektur ist skalierbar für die Erweiterung der Elektrofahrzeugdiagnose, mit CAN-FD- und DoIP-Anschlüssen auf der Leiterplatte für die nächste Produktrevision.
11. Elektromobilität und zukünftige Erweiterungsmöglichkeiten
11.1 Diagnose von Elektrofahrzeugen
„EV-ready“ ist derzeit der am häufigsten verwendete Ausdruck in der Fahrzeugdiagnostik. Doch was genau ist hardwareseitig erforderlich?
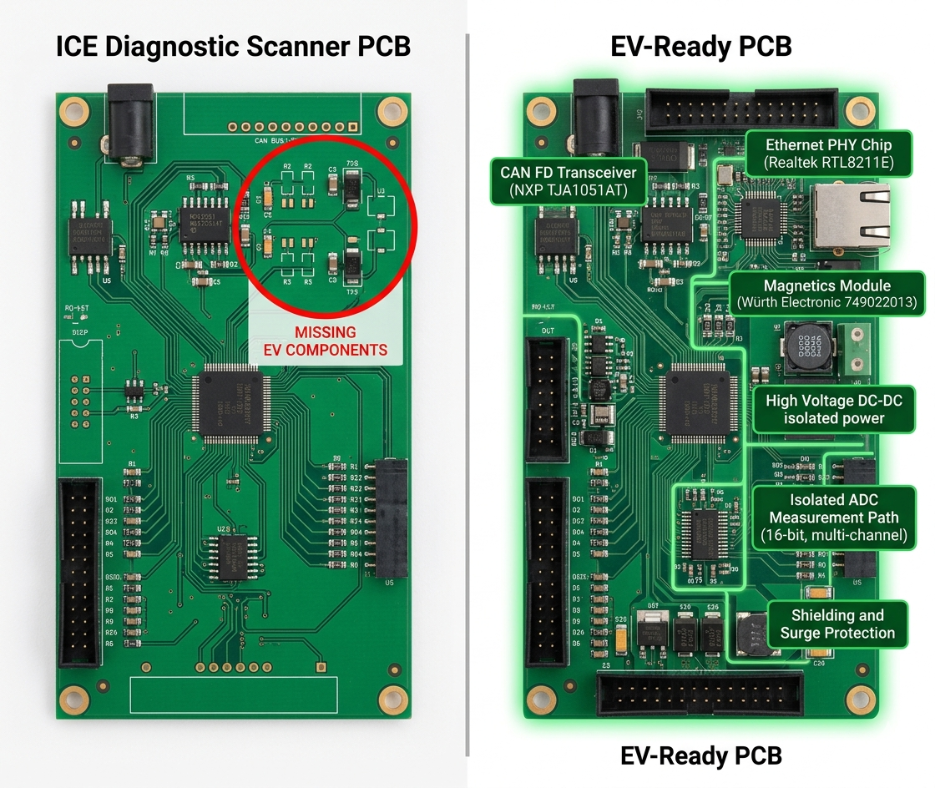
Die BMS-Überwachung von Akkus mit 400 bis 800 V erfordert zusätzliche hochauflösende ADCs und isolierte Messpfade, die ein Standard-Verbrennungsmotor-Scanner nicht bietet. Die Hochspannungssystemdiagnose – HV-Isolationsfehler, Schweißpunkterkennung, thermisches Durchgehen – verwendet andere PIDs, andere Sicherheitszugriffsschemata und andere Fehlermodi als die Diagnoseverfahren von Verbrennungsmotoren. Steuergeräte von Elektrofahrzeugen verwenden zwar dieselben UDS-Befehle wie Verbrennungsmotoren, jedoch mit völlig anderen PID-Strukturen. Ohne die passende Hardware der physikalischen Schicht kann der Scanner auf vielen Plattformen keine Verbindung herstellen. Dies ist kein Datenbankproblem, sondern ein Hardwareproblem.
• Überwachung von BMS-Spannung, Temperatur und Zellbilanz
• Erkennung von Hochspannungstrennungsfehlern und Analyse des Schützzustands
• Diagnose des Ladesystems einschließlich des EVSE-Kommunikationsprotokolls
• Überwachung des Frühwarnsignals für thermisches Durchgehen
11.2 DoIP- und OTA-Erweiterung
Die vollständige DoIP-Unterstützung (ISO 13400) erfordert einen Ethernet-PHY, Magnetik und einen TCP/IP-Stack auf dem Mikrocontroller. Dies erhöht die Materialkosten um 8 bis 12 US-Dollar, bevor die Firmware-Entwicklung berücksichtigt wird. Die CAN-FD-Unterstützung für die 5-Mbit/s-Datenphasenkommunikation verursacht zusätzliche Kosten von 2 bis 3 US-Dollar pro Einheit. Die gesamten zusätzlichen Materialkosten für die Umstellung von einem soliden, nur für Verbrenner geeigneten Scanner auf ein vollständig für Elektrofahrzeuge geeignetes Gerät belaufen sich auf 25 bis 40 Prozent – das entspricht 15 bis 25 US-Dollar pro Gerät.
Wenn Kunden die „EV-Diagnose hinzufügen“ wünschen, ist die Kommunikation eindeutig: Es handelt sich hierbei nicht um eine einfache Software-Ankreuzoption. Es sind sechs Monate fahrzeugspezifische Datenbankarbeit sowie Hardwareänderungen erforderlich, die die Stückkosten um 15 bis 25 US-Dollar erhöhen. Wenn Sie einen EV-fähigen Scanner beschaffen, fordern Sie vor Vertragsabschluss die Checkliste für DoIP- und CAN-FD-Hardware sowie einen unterzeichneten Validierungsbericht für mindestens drei EV-Plattformen an.
„Fordern Sie die Checkliste für die DoIP- und CAN-FD-Hardware sowie einen unterzeichneten Validierungsbericht für mindestens drei EV-Plattformen an. Keine Marketingaussage. Ein unterzeichnetes Dokument.“
12. Warum Sie sich bei der Entwicklung von Kfz-Diagnosegeräten für uns entscheiden sollten
Wir stellen nicht die längste Feature-Liste in den Vordergrund, sondern die Daten.
Unsere Kompetenz im Leiterplattendesign geht über Standard-EMV-Layouts hinaus und umfasst fahrzeugspezifische Störfestigkeit – validiert an realen Fahrzeugen mit Lastbänken und Störsignalgebern, nicht nur in Simulationen. Der Ausfall des Mercedes Sprinter im Jahr 2023 führte zu Designregeln, die in keiner ISO-Norm vorgeschrieben sind und unsere Ausfallrate in der Kommunikation von 4.2 auf 0.3 Prozent senkten. Dieses Wissen fließt in jedes unserer Designs ein.
Die Entwicklung von Hardware in Automobilqualität setzt die Verwendung von AEC-Q100-Komponenten, die Einhaltung der Normen ISO 7637 und 16750 als Ausgangspunkt voraus und dokumentierte Strategien für alternative Komponenten vor der Fertigung. Der Unterschied zwischen einem Scanner, der die Zertifizierung besteht, und einem, der 200,000 Steckzyklen in realen Werkstätten übersteht, lässt sich nicht aus einem Datenblatt ablesen.
Die Entwicklung eingebetteter Software umfasst den gesamten Stack: Protokoll-Firmware, Steuergeräte-Datenbankmanagement, OTA-Update-Infrastruktur und Cloud-Integration. Wir behandeln die Aktualisierungsfrequenz der Datenbank als vereinbarte Leistung mit einer Service-Level-Vereinbarung (SLA) – maximal 45 Tage von der Veröffentlichung eines neuen Modelljahres bis zum validierten Datenbank-Push.
Der Komplettservice für OEM und ODM bedeutet, dass der Kunde ein fertiges, zertifiziertes und marktreifes Produkt erhält. CE-, FCC- und RoHS-Zertifizierungen sind im Programm enthalten. Serienproduktion mit 100-prozentiger Funktionsprüfung. Vollständige Fahrzeugkommunikationsvalidierung jedes einzelnen Geräts vor dem Versand.
Wir erklären unseren Kunden auch, was unser Tool nicht kann. Zum Beispiel die Umgehung von Sicherheits-Gateways auf bestimmten Plattformen ab Baujahr 2024. Ebenso wenig den erforderlichen hybriden Workflow für die Steuergeräteprogrammierung dieser Fahrzeuge. Auch die tatsächlichen Hardwarekosten für die Elektromobilitätsvorbereitung sind uns bewusst. Diese Transparenz ist keine Schwäche im Vertriebsprozess. Unsere Daten zu Folgeaufträgen belegen das Gegenteil.
| 50+Fahrzeugvalidierungsflotte | 45 TageMaximale Aktualisierungs-SLA pro Modelljahr | 0.3%Ausfallrate der Feldkommunikation | 100%Funktionsprüfung pro Einheit |
Alle Zahlen stammen aus internen Produktionsaufzeichnungen, RMA-Protokollen und Feldvalidierungsdaten von über 200,000 ausgelieferten Einheiten. Kunden- und Markenidentitäten werden gemäß ODM-Vereinbarungen anonymisiert.



