1. Panoramica del progetto
1.1 Background del cliente
Il cliente produce caschi di sicurezza intelligenti per uso industriale, destinati ai settori delle costruzioni, dell'industria mineraria, petrolifera e del gas e della produzione pesante. Possedeva certificazioni per DPI passivi e vantava una solida rete di rivenditori in tre continenti. Il problema era che i concorrenti stavano lanciando caschi connessi e l'azienda non aveva una risposta adeguata. L'obiettivo era trasformare un casco di sicurezza certificato in un dispositivo IoT funzionante, senza perdere le certificazioni EN 397 e ANSI Z89.1.
Leggi anche: Caso di studio su un tablet intelligente per l'apprendimento nella prima infanzia.
1.2 Obiettivi del progetto
Ci siamo concentrati sui sei obiettivi principali fin dal primo giorno.
- Tracciamento GPS in tempo reale
- Rilevamento automatico delle cadute con allarme
- Rilevamento ambientale della temperatura, con rilevamento gas opzionale.
- Autonomia della batteria di almeno dodici ore
- Grado di protezione IP65 o IP67 contro gli agenti atmosferici.
- Un design hardware scalabile dal prototipo alla produzione di massa senza necessità di una riprogettazione completa.
Ogni decisione ingegneristica successiva ha dovuto rispondere a questi sei requisiti.
2. Sfide del settore nello sviluppo di caschi intelligenti
2.1 Ambienti industriali difficili
Nei cantieri edili sono in funzione macchinari pesanti che generano vibrazioni costanti. Le gallerie minerarie combinano elevata umidità e polveri sottili. Le piattaforme offshore sono soggette a spruzzi di acqua salata e urti dovuti alla caduta di attrezzature. Costruire un sistema di sensori che funzioni in laboratorio è un problema. Mantenerlo calibrato dopo una caduta da due metri su cemento, con la trasmissione attraverso connettori ostruiti dalla polvere, è tutt'altra cosa.
2.2 Posizionamento in ambienti interni ed esterni
Il segnale GPS si interrompe all'interno di edifici con struttura in acciaio, passaggi sotterranei e magazzini con soffitti densi. Un operaio che entra in una galleria scompare dalla mappa di tracciamento nel momento stesso in cui si perde il segnale satellitare. Il progetto necessitava di un approccio ibrido.
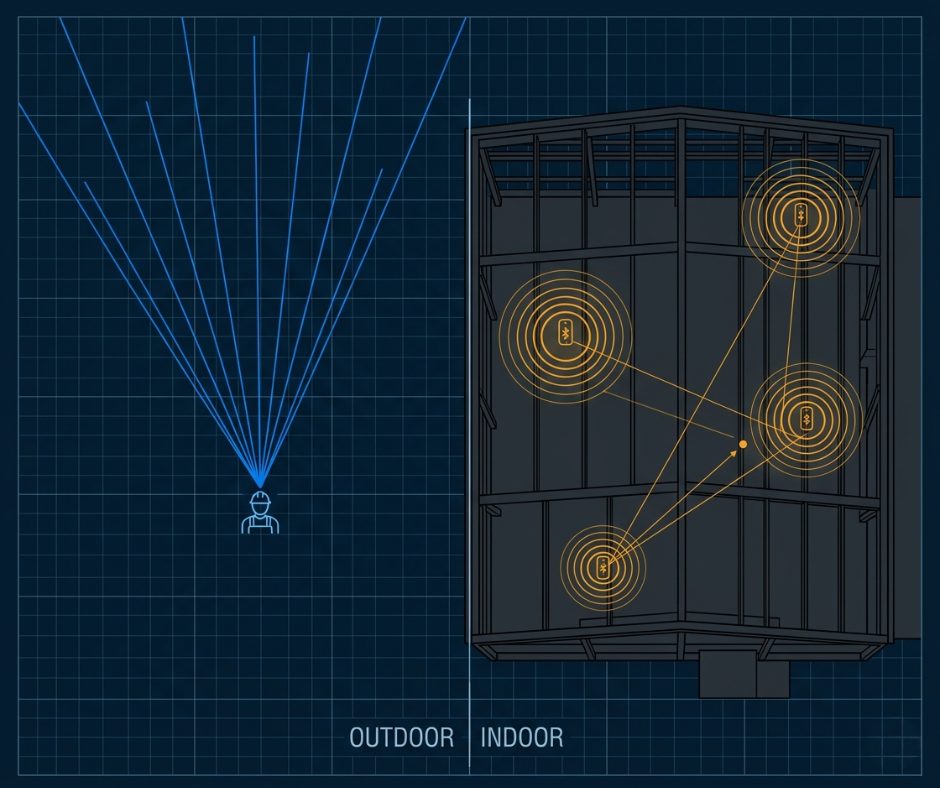
All'aperto, il GPS offre una precisione da cinque a dieci metri, sufficiente per la consapevolezza a livello di sito. All'interno, subentra la triangolazione tramite beacon BLE. Dove è necessaria una precisione inferiore al metro, come nelle zone di esclusione dei macchinari, gli ancoraggi UWB colmano questa lacuna. Il passaggio tra le modalità avviene automaticamente in base all'intensità del segnale satellitare, senza alcun intervento da parte dell'operatore.
2.3 Affidabilità degli avvisi in tempo reale
Se una persona cade, un allarme di sicurezza che impiega quaranta secondi ad arrivare è decisamente troppo lento per essere di aiuto.
Ecco la semplice ripartizione:
1. Connessione (LTE Cat-1)
La maggior parte dei dispositivi utilizza LTE Cat-1 per i dati. È la scelta migliore perché:
- Utilizza lo stesso Segnale 4G il tuo telefono usa.
- Invia messaggi rapidamente.
- Consuma pochissima batteria rispetto a una normale connessione internet ad alta velocità.
2. Segnale di retromarcia
Se un lavoratore si trova in una zona remota senza segnale di telefonia mobile, il dispositivo utilizza LoRa.
- Può inviare un “SOS” e la tua posizione (GPS) diversi chilometri.
- È molto lento, ma funziona anche in assenza di connessione 4G.
3. Memoria locale
Ogni volta che si verifica un avviso, il dispositivo salva anche una copia delle informazioni all'interno del memoria interna.
- Se il segnale si interrompe durante la trasmissione, i dati non vengono persi.
- Il dispositivo attende che l'operatore torni in un'area coperta dal segnale.
2.4 Risparmio energetico
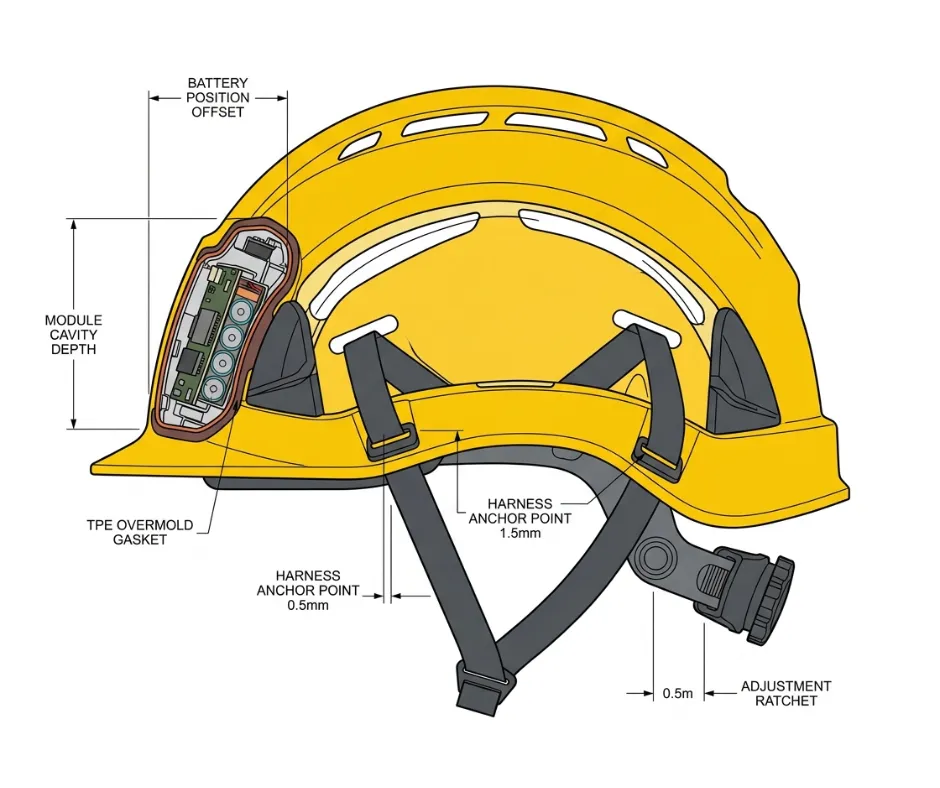
Una batteria da 4,000 mAh montata sulla parte anteriore del casco sposta il baricentro in avanti e causa affaticamento del collo entro poche ore. La batteria di produzione è da 3,200 mAh, posizionata nella parte posteriore del casco per bilanciare il modulo elettronico anteriore. Il rilevamento GPS avviene a intervalli di un secondo durante il movimento e si riduce a quindici secondi quando l'accelerometro non rileva alcun movimento. Il modem LTE entra in modalità di risparmio energetico tra una finestra di trasmissione e l'altra. Queste modifiche, nel loro complesso, hanno portato l'autonomia sul campo a quindici ore, superando ampiamente l'obiettivo di dodici ore.
3. Progettazione dell'architettura del sistema
3.1 Piattaforma di elaborazione centrale
Il cervello di questo dispositivo è un piccolo chip molto efficiente nei calcoli matematici. Utilizza un semplice programma per gestire diverse funzioni, come il rilevamento delle cadute e l'invio di messaggi. I progettisti hanno scelto un piccolo chip perché consuma pochissima energia, si avvia istantaneamente ed è più semplice da gestire. È presente anche un secondo chip ausiliario, altrettanto piccolo, che rimane sempre attivo per monitorare i movimenti. Questo permette al chip principale di spegnersi completamente e risparmiare batteria finché il chip ausiliario non rileva una caduta e lo "riattiva".
3.2 Integrazione dei sensori
L'unità di misura inerziale è un dispositivo MEMS a sei assi con un accelerometro a tre assi e un giroscopio a tre assi integrati su un unico chip. Durante il rilevamento dell'attività, l'accelerometro campiona a 400 Hz per alimentare la pipeline di rilevamento delle cadute. Il modulo GPS è compatto (18 mm) e dotato di antenna integrata, raggiungendo un avvio a freddo in meno di trenta secondi in cielo aperto.
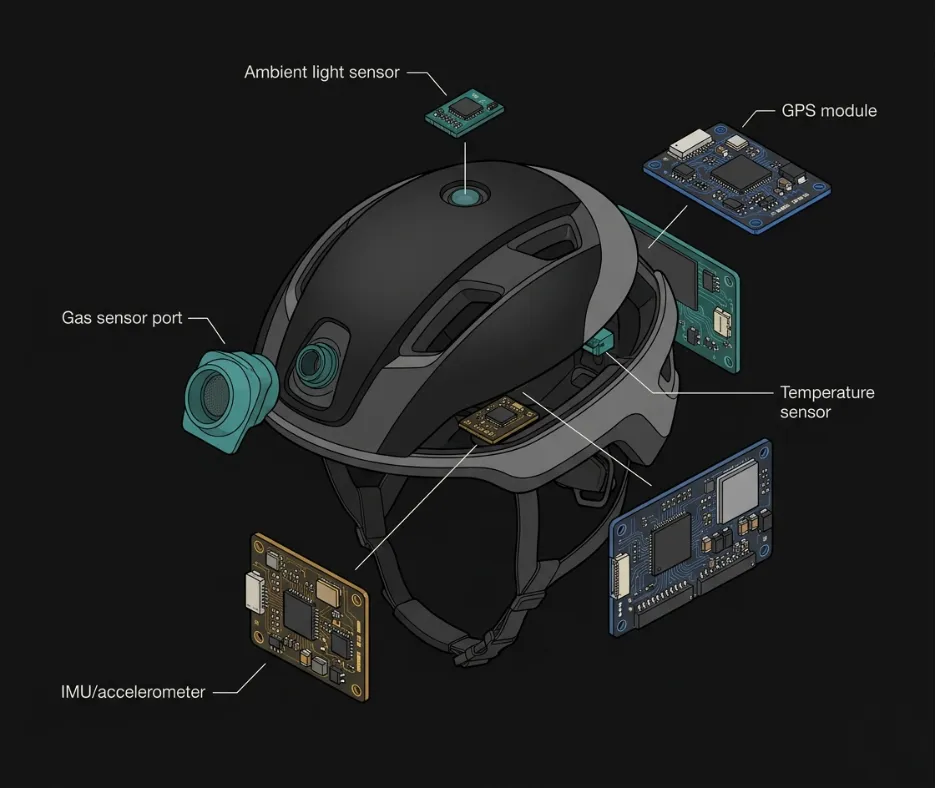
Un sensore di temperatura a un filo monitora le condizioni termiche ambientali e della batteria. Due porte opzionali per sensori di gas accettano moduli elettrochimici per CO e H2S tramite un connettore standardizzato, in modo che lo stesso PCB di base funzioni sia per costruzioni standard che per ambienti con gas ad alto rischio.
3.3 Architettura di comunicazione
La connettività si articola su quattro protocolli. LTE Cat-1 gestisce la trasmissione dei dati principali e degli avvisi. Il Bluetooth 5.0 si occupa dell'accoppiamento con l'app mobile dedicata e gestisce anche la funzione di posizionamento indoor tramite la scansione dei beacon BLE. LoRa si occupa delle comunicazioni di emergenza laddove la rete cellulare non è disponibile. Un pulsante SOS cablato, indipendente dallo stato del firmware, attiva un allarme anche in caso di arresto anomalo dell'applicazione principale.
3.4 Integrazione tra cloud e backend
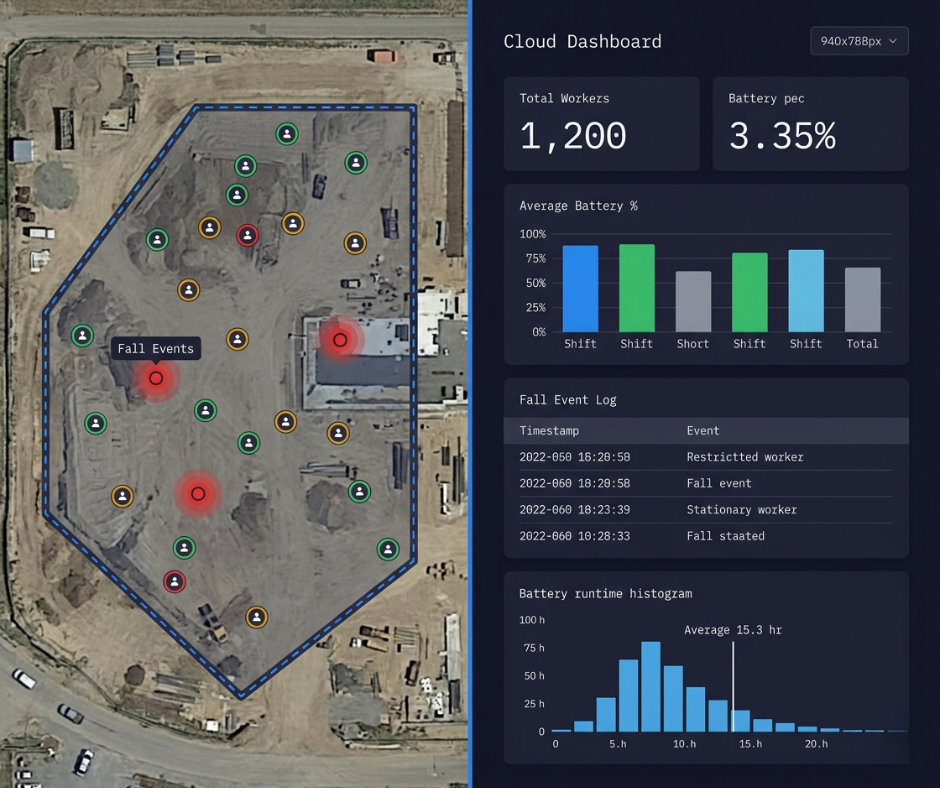
I dati raggiungono il cloud tramite un broker MQTT, scelto per il basso overhead su connessioni cellulari con risorse limitate. La dashboard web mostra la posizione in tempo reale dei lavoratori su una sovrapposizione della planimetria del sito, con codifica a colori in base allo stato di attività. Cadute, violazioni del geofence e attivazioni SOS creano ciascuno record di incidente con timestamp. La distribuzione del firmware OTA distribuisce gli aggiornamenti all'intera flotta senza la necessità di richiamare fisicamente i caschi.
4. Ingegneria di circuiti stampati e hardware
4.1 Progettazione di PCB multistrato compatto
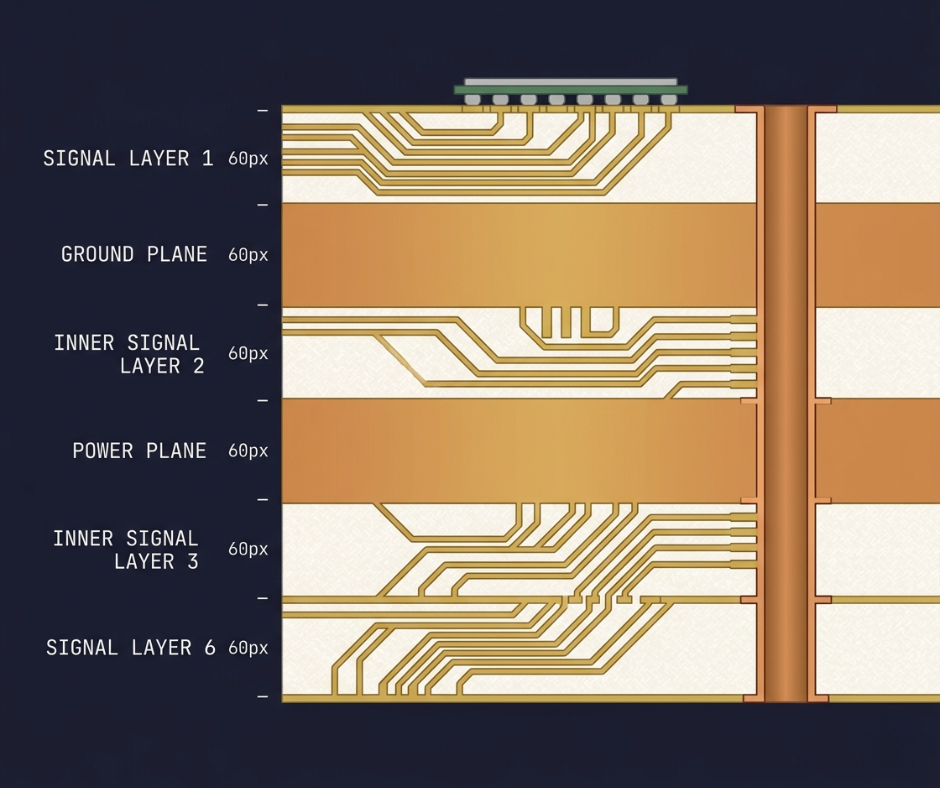
Il PCB principale ha una struttura a sei strati di 58 mm x 42 mm. Il piano di massa RF si trova direttamente sotto lo strato superiore del segnale, mantenendo le tracce dell'antenna corte e a impedenza controllata. Il modem LTE e il modulo GPS occupano angoli opposti della scheda, separati da una barriera di rame colato che impedisce la desensibilizzazione del ricevitore da parte del trasmettitore LTE. Schermature EMI sono saldate su entrambe le sezioni RF. Il routing degli strati interni utilizza curve a 45 gradi anziché ad angolo retto per ridurre le riflessioni ad alta frequenza.
4.2 Sistema di gestione dell'alimentazione
Il circuito integrato di gestione dell'alimentazione svolge quattro funzioni: ricarica della batteria fino a 1 A, distribuzione dell'alimentazione su linee a 1.8 V, 3.3 V e 5 V, segnalazione dello stato di carica della batteria tramite I2C e protezione da sovratensione, sovracorrente e scarica profonda. La ricarica accetta input sia da USB-C che dal contatto pogo-pin sulla base di ricarica. Un circuito integrato dedicato per l'indicatore di carica tiene traccia della capacità residua con un errore inferiore al 3% in funzione della temperatura. Il firmware legge questo valore ogni trenta secondi e lo comunica insieme ai dati di posizione.
4.3 Modulo elettronico resistente agli urti
Il PCB è montato su quattro distanziatori M2 con rondelle in neoprene tra la scheda e il telaio, assorbendo il picco di accelerazione derivante da una caduta da due metri. I connettori incapsulati su tutti i cablaggi esterni impediscono l'ingresso di umidità nel punto in cui i cavi escono dall'alloggiamento del modulo. L'alloggiamento stesso è realizzato in ABS con pareti da 2.5 mm con uno stampaggio a iniezione di TPE all'interfaccia con il guscio, formando la tenuta richiesta per la certificazione IP67 secondo i test IEC 60529.
5. Progettazione meccanica e industriale
5.1 Integrazione strutturale del casco
Il modulo elettronico è alloggiato in una cavità ricavata nella parte posteriore della calotta durante la fase di stampaggio, anziché essere ricavato successivamente in una calotta preesistente.
Tale distinzione ha mantenuto intatta la geometria strutturale per i test di attenuazione dell'impatto EN 397. L'involucro ha superato ripetuti test di caduta con l'intero carico elettronico installato, confermando che la massa aggiunta non ha ridotto la protezione. Gli operatori possono sostituire la batteria sul campo, ma la rimozione del modulo principale richiede un attrezzo, il che impedisce lo smontaggio accidentale in loco.
5.2 Ergonomia e comfort
Il peso totale del casco, batteria inclusa, è di 520 grammi, un valore accettabile per un utilizzo continuativo di otto ore. Il sistema di chiusura a cricchetto interno a sei punti è stato riprogettato con un offset in avanti di 15 mm, spostando il baricentro del casco all'indietro per contrastare il carico dei componenti elettronici anteriori. I canali di ventilazione nella calotta rimangono liberi. I test effettuati a una temperatura ambiente di 38 °C hanno confermato che il modulo elettronico non crea punti di concentrazione del calore a contatto con il cuoio capelluto dell'operatore.
5.3 Progettazione modulare
Il pacco batterie scorre fuori attraverso un'apertura laterale e si blocca con un meccanismo a un quarto di giro. La sostituzione richiede meno di trenta secondi senza attrezzi. Nei cantieri, sia di giorno che di notte, le persone portano con sé batterie di riserva in carica. Ad esempio, i lavoratori sostituiscono una batteria scarica con una carica, in modo che il casco non smetta mai di funzionare. Inoltre, è possibile realizzare un casco in grado di rilevare il gas, senza bisogno di acquistare un'intera nuova scheda elettronica interna. Basta scollegare il vecchio componente e collegare un nuovo modulo sensore tramite un semplice connettore, il che è molto più facile ed economico.
6. Funzionalità software e di intelligenza artificiale
6.1 Algoritmo di rilevamento delle cadute
Un approccio basato solo su una soglia produce troppi falsi allarmi dovuti a lavoratori accovacciati, che salgono su scale o che lasciano cadere il casco su una superficie. L'algoritmo, invece, si articola in tre fasi. La prima fase rileva un segnale di caduta libera: letture di bassa accelerazione sostenute su tutti e tre gli assi, che indicano la fase di assenza di peso di una caduta reale.

La seconda fase rileva un evento ad alto impatto che supera una soglia configurabile. La terza fase attende otto secondi affinché il lavoratore riprenda il movimento normale. In caso contrario, l'evento viene classificato come caduta e viene attivato un allarme. Rispetto a un sistema a soglia singola, questo approccio a tre fasi ha ridotto i falsi allarmi di circa il settanta percento nelle prove sul campo.
6.2 Geofencing e zone di sicurezza
I responsabili utilizzano una mappa computerizzata per delimitare aree di sicurezza intorno alle zone pericolose, come luoghi con rischio di esplosione o con alta tensione elettrica. Se un lavoratore entra in una di queste aree, il dispositivo invia immediatamente un avviso. Il dispositivo è sufficientemente intelligente da individuare autonomamente queste zone. Ciò significa che, anche in caso di segnale internet debole, l'allarme si attiverà comunque per garantire la sicurezza del lavoratore.
6.3 Comunicazione di emergenza
Premendo il pulsante SOS viene generato un pacchetto prioritario contenente coordinate GPS, ID del dispositivo e data e ora. Il pacchetto viene trasmesso simultaneamente su tutte le bande di frequenza disponibili, prima LTE e poi LoRa come alternativa. La piattaforma contrassegna gli eventi SOS con la massima priorità e può inviare notifiche SMS ai contatti di emergenza preconfigurati. Il modulo vocale bidirezionale opzionale utilizza la connessione LTE, consentendo a un supervisore di cantiere di parlare direttamente con un lavoratore impossibilitato a operare senza bisogno di una radio separata.
7. Sicurezza e conformità
7.1 Norme di sicurezza per i caschi
Questo casco di sicurezza soddisfa i più elevati standard di sicurezza ufficiali per Stati Uniti, Europa e Canada. L'aspetto più importante è che il casco è stato testato e approvato con tutta l'elettronica già integrata. Ciò ha richiesto una stretta collaborazione con il laboratorio di collaudo durante la fase di progettazione degli stampi. Qualsiasi modifica geometrica alla calotta dopo l'approvazione iniziale della certificazione comporta un nuovo test completo, pertanto era imprescindibile ottenere un design della cavità corretto già nella prima revisione degli stampi.
7.2 Conformità elettronica
Il gruppo radio possiede l'autorizzazione FCC per il Nord America e la marcatura CE ai sensi della Direttiva sulle apparecchiature radio per l'Europa. La conformità RoHS è stata confermata in fase di approvvigionamento dei componenti, richiedendo la documentazione a ciascun fornitore prima di effettuare gli ordini di acquisto. Il pacco batterie è dotato di certificazione UN38.3 per il trasporto aereo, requisito necessario al cliente per la distribuzione internazionale. La dichiarazione REACH copre l'intera distinta base.
7.3 Standard per le prove ambientali
La tenuta IP67 è stata verificata mediante immersione in acqua a un metro di profondità per trenta minuti senza alcuna infiltrazione. I test di vibrazione hanno eseguito il casco assemblato su una tavola vibrante secondo il profilo IEC 60068-2-6 per due ore per asse. I cicli termici hanno coperto un intervallo da -20 a +70 gradi Celsius per venti cicli. I test sulle emissioni irradiate EMC hanno confermato che il dispositivo non interferisce con le comunicazioni radio del sito o con le reti di sensori wireless già installate nei cantieri.
8. Test e convalida
8.1 Test Funzionali
I test di precisione del GPS hanno utilizzato un ricevitore GNSS di riferimento per confrontare le letture in trenta punti su un campo aperto. Il GPS integrato nel casco ha mostrato una corrispondenza con il riferimento entro 4.2 metri in media. La calibrazione dell'accelerometro ha utilizzato un dispositivo statico a sei posizioni per verificare l'allineamento degli assi e la correzione dell'offset. I test di throughput LTE hanno misurato il tempo di upload per un pacchetto completo del sensore a livelli di segnale fino a -110 dBm, confermando la trasmissione ai margini della cella, dove si trovano molti cantieri.
8.2 Test di durabilità
Il PCB ha resistito a ripetute cadute da 1.5 metri su una piastra d'acciaio, verificate tramite ispezione visiva con ingrandimento 10x e test funzionali completi dopo ogni evento. Nessun cedimento delle saldature, nessuna separazione dei connettori. Un test di vibrazione continua di 500 ore su un vibratore per autoveicoli non ha rilevato alcuna migrazione dei componenti. Sessanta giorni di esposizione agli agenti atmosferici su dieci unità assemblate si sono conclusi con il superamento completo della verifica funzionale da parte di tutte le unità.
8.3 Test della batteria e delle prestazioni
Quindici unità hanno eseguito un protocollo di simulazione sul campo: connessione LTE, polling GPS a intervalli di un secondo, pubblicità BLE attiva, registrazione dei sensori ogni cinque secondi. L'autonomia media dell'intera flotta è stata di 15.3 ore. Tre unità hanno superato le sedici ore. Nessuna è scesa al di sotto delle quattordici. Dopo 500 cicli completi di carica-scarica, tutte le batterie hanno mantenuto una capacità superiore all'80%, in linea con un intervallo di sostituzione sul campo di diciotto mesi a due anni in condizioni di utilizzo quotidiano.
9. Produzione industriale e produzione di massa
9.1 Ottimizzazione DFM
La fase di progettazione per la produzione, con un ordine minimo di 500 unità, ha individuato tre punti di riduzione dei costi. I contenitori di schermatura RF, precedentemente realizzati con lamiera piegata su misura, sono stati sostituiti con componenti stampati, riducendo il costo unitario del 22%. Un modulo GPS alternativo con specifiche elettriche identiche è stato qualificato da un secondo fornitore, eliminando il rischio di fornitura da un unico fornitore. La razionalizzazione dei punti di test ha ridotto la complessità delle attrezzature ICT e il tempo di test per unità da 4.5 minuti a 2.8 minuti.
9.2 SMT e assemblaggio
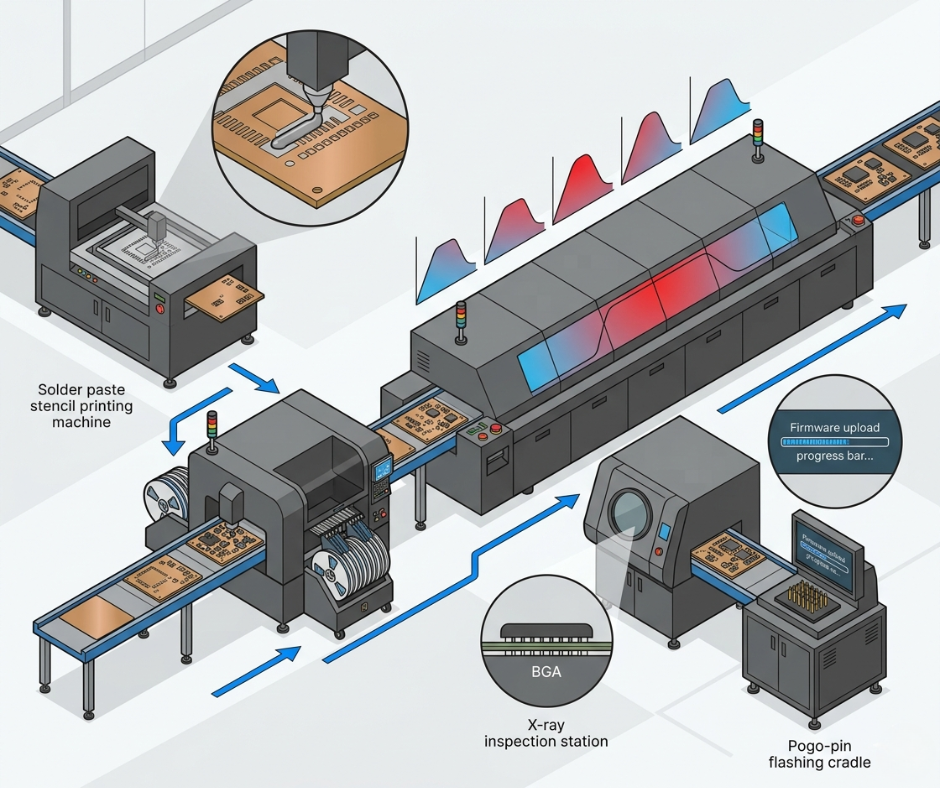
L'assemblaggio del PCB viene eseguito su un profilo di forno a rifusione a sei zone, progettato in base ai requisiti di saldatura del modem LTE BGA. Ogni scheda viene sottoposta a ispezione a raggi X per confermare l'integrità delle giunzioni BGA. Tra l'alloggiamento del PCB e la cavità del guscio viene applicata una guarnizione in silicone bicomponente, la cui compressione è controllata da una specifica di coppia sulle quattro viti prigioniere M3. La programmazione finale del firmware avviene tramite un supporto a pogo pin che programma tutte e quattro le regioni di memoria, esegue un autotest e scrive il numero di serie dell'unità nella memoria non volatile in un ciclo di sessanta secondi.
9.3 Garanzia di qualità
Ogni unità viene sottoposta a test funzionali automatizzati che includono acquisizione GPS, registrazione LTE, pubblicità BLE, risposta dell'accelerometro, azionamento dei pulsanti, precisione della tensione della batteria e integrità della tenuta IP tramite test di decadimento della pressione. Un periodo di rodaggio di 48 ore a 45 °C elimina i difetti di fabbricazione prima della spedizione. Il due percento delle unità viene sottoposto a test RF condotti rispetto a un riferimento calibrato per individuare difetti di assemblaggio dell'antenna che superano l'ispezione visiva.
10. Risultati del progetto
10.1 Risultati tecnici
La versione di produzione ha raggiunto una precisione GPS inferiore a cinque metri all'aperto e una precisione BLE da uno a due metri in ambienti interni dotati di beacon. Il casco è molto efficace nel rilevare le cadute. Nei test, ha rilevato correttamente il 98% delle cadute. Non invia quasi mai falsi allarmi per errore. Inoltre, la durata della batteria è superiore a 15 ore, garantendo un'autonomia per tutta la giornata.
10.2 Implementazione sul mercato
La prima implementazione ha coinvolto 1,200 lavoratori dislocati in tre cantieri attivi. La dashboard monitorava le posizioni in tempo reale e generava report automatici sulla sicurezza. Nei primi sessanta giorni, la flotta ha registrato quattordici cadute reali, ognuna delle quali ha comportato un tempestivo intervento del supervisore. Il framework OEM consente ai distributori regionali di applicare il proprio marchio, adattare le configurazioni di geofencing a specifiche tipologie di cantiere e scegliere tra varianti di sensori standard e di rilevamento del gas da un'unità base condivisa.
11. Espansione futura
11.1 Integrazione video tramite IA
Una variante del modulo fotocamera monta un sensore grandangolare sulla parte anteriore. L'inferenza sul dispositivo, utilizzando un modello CNN compresso, segnala le non conformità dei DPI, come ad esempio un lavoratore che si toglie il casco in una zona in cui è obbligatorio, senza trasmettere video grezzi al cloud. L'elaborazione edge risolve sia i limiti di larghezza di banda che i problemi di privacy dei lavoratori senza richiedere modifiche all'infrastruttura in loco.
11.2 Ecosistema dell'edilizia intelligente
Il casco si abbina a un giubbotto di sicurezza connesso, dotato di propri sensori, formando una rete di monitoraggio per ogni lavoratore. Entrambi i dispositivi condividono un'unica identità cloud, consentendo alla piattaforma di incrociare i dati relativi alla postura rilevati dal giubbotto con i dati relativi al movimento del casco per una valutazione più precisa del rischio ergonomico. L'analisi della flotta individua i siti o i turni con tassi di incidenti statisticamente elevati prima che si verifichi un infortunio, anziché dopo.
12. Perché questo approccio allo sviluppo funziona
Progettare un casco di sicurezza intelligente non è un progetto software con l'aggiunta di hardware. Lo standard del casco viene prima di tutto, e l'elettronica si sviluppa all'interno di ciò che rimane. Questa sequenza richiede un team che abbia esperienza in programmi di certificazione, conosca i limiti strutturali previsti dalle norme EN 397 e ANSI Z89.1 e progetti la geometria del PCB in base allo spazio disponibile all'interno del casco, anziché aspettarsi che quest'ultimo si adatti all'ingombro di un modulo standard. Il risultato è un dispositivo che non costringe il responsabile del cantiere a scegliere tra la protezione dei lavoratori e la connettività. Entrambe sono certificate, entrambe vengono aggiornate tramite OTA (Over-The-Air) ed entrambe sono scalabili in base alla crescita dell'implementazione.
Pronti a sviluppare un casco di sicurezza intelligente o un dispositivo indossabile industriale connesso? Contattate il team di ingegneri di Wonderful PCB per definire la soluzione personalizzata per la sicurezza dei lavoratori.