Du står over for særlige problemer, når du arbejder med humanoide robot-PCB-design. Avancerede PCB-systemer kører humanoide robotter. De hjælper med realtidsbehandling og bruger mange spændingsskinner. Tabellen nedenfor viser, hvordan humanoide behov adskiller sig fra almindelige PCB-behov:
Aspect | Krav til humanoide robot-PCB'er | Generelle printkortkrav |
|---|---|---|
strømforsyning | Mange spændingsskinner (1.8V til 24V+) | Normalt én spændingsskinne |
Sensorintegration | Mange sensorer, understøtter mange protokoller (UART, I2C osv.) | Få sensorer |
Miljøbetingelser | Skal kunne håndtere vibrationer, varme og EMI | Normale forhold |
Power Management | Avancerede systemer med batteristyring | Enkel strømstyring |
Behandlingsevner | Realtidsbehandling med hurtige kontrolløkker | Regelmæssig behandling |
Du har brug for specielle materialer og fleksible kredsløb til stærke humanoide printkortsystemer. Feltet for humanoide robotter vokser hurtigt. Markedet kan nå 6.5 milliarder dollars i 2030. Det kan vokse med 138 % hvert år. Sensorer og kunstig intelligens gør humanoide printkortdesign anderledes end almindelig robotteknologi.
Behov for humanoide robot-PCB'er
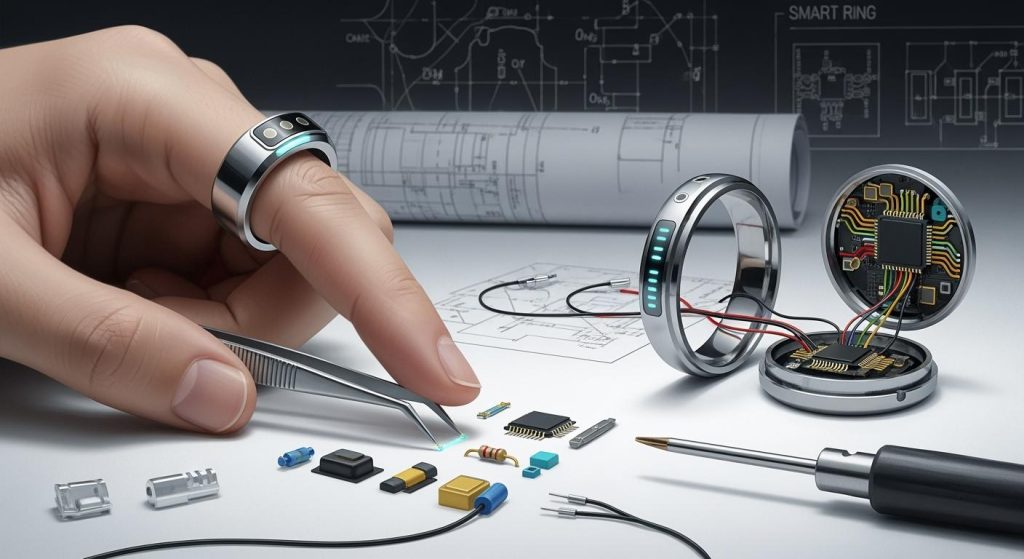
Plads og formfaktor
Det er vanskeligt at designe printkort til humanoide robotter. Man skal montere printkort i små, buede eller bevægelige dele. Disse robotter har brug for printkort, der ikke altid er rektangler. Nogle gange stabler man printkort oven på hinanden. Fleksible printkort hjælper med at montere elektronik i arme, ben og led. Tabellen nedenfor viser nogle problemer og hvordan man løser dem:
Udfordring | Løsning |
|---|---|
Pladsbegrænsninger | Brug kompakte layouts, flerlags-pcb'er og fleksible boards. |
Uregelmæssige former | Ikke-rektangulære designs, der passer til antropomorfe strukturer. |
Stablede brædder | Vertikal stabling eller fleksible printkort til kompakte rum. |
Producenter af humanoide robotter skal tænke over, hvad markedet ønsker. De skal lave stærke printplader, der passer ind i robottens krop. Markedet for humanoide printplader bliver ved med at vokse, efterhånden som flere virksomheder slutter sig til.
Højfrekvente materialer
Der er behov for særlige materialer til humanoid robotteknologi. Disse materialer hjælper printkort med at arbejde med hurtige signaler og på vanskelige steder. DuPont Pyralux TK lader robotter bevæge sig på flere måder. Panasonic FELIOS R-F775 hjælper med at lave mindre, bedre printkort. Nogle materialer hjælper med at modstå varme og holder længere under barske forhold. Tabellen nedenfor viser vigtige materialer og deres funktion:
Materiale | Ydelsesfordele |
|---|---|
DuPont Pyralux TK | Muliggør komplekse bevægelser, hvilket forbedrer robotters smidighed og tilpasningsevne. |
Panasonic FELIOS R-F775 | Bidrager til miniaturisering, hvilket muliggør kompakte, men højtydende designs. |
N / A | Forbedrer termisk stabilitet og modstandsdygtighed over for barske miljøer, hvilket sikrer pålidelighed. |
Du skal vælge de bedste materialer til hver del af din robot. Markedsundersøgelser viser, at bedre materialer lave bedre robotter. Virksomheder, der bruger nye materialer, klarer sig bedre på markedet.
Sensor- og AI-integration
Sensorer og AI-moduler hjælper robotter med at lære og reagere. Du skal tilslut mange sensorer til dit printkort. Du har også brug for AI-chips, der arbejder hurtigt. SOM-6884-modulet giver dig mulighed for at opgradere uden at starte forfra. Det bruger AI-klare processorer, som f.eks. 13. generations Intel Core, til smart computing. Du får hurtige forbindelser med PCIe Gen4 og USB 4.0. Disse funktioner hjælper din robot med at sanse, tænke og handle hurtigt.
Du kan tilføje nye sensorer eller AI-moduler efter behov.
Du holder dit design åbent for fremtidige ændringer.
Du opfylder, hvad både producenter og brugere ønsker inden for robotteknologi.
Markedet for humanoide robot-pcb'er vokser fortsat, efterhånden som flere virksomheder bruger bedre materialer og smarte moduler. Ved at vælge det rigtige printkort, de rigtige materialer og måder at forbinde ting på, hjælper du med at gøre robotter bedre.
Humanoid robot PCB-design

Design trin
Først finder du ud af, hvad din robot skal gøre. Du skriver alle kravene ned. Dernæst bruger du EDA-software til at lave et diagram. Dette hjælper dig med at se, hvordan hver del forbindes. Derefter arbejder du med layout og routing. Du sætter delene på plads og tegner linjer til forbindelser. Du tænker på varme og hvordan robotten bevæger sig. Derefter kontrollerer du dit design med en regelkontrol. Dette hjælper dig med at opdage fejl tidligt. Nu vælger og får du de rigtige materialer. De næste trin er billeddannelse, stabling, boring og plettering. Du tilsætter loddepasta og sætter delene på printpladen. Maskiner hjælper med at lodde delene på plads. Du ser på printpladen og tester, om den fungerer. Til sidst færdiggør du samlingen og pakker printpladen.
Særlige overvejelser i forbindelse med design af humanoid robot-printkort
Du skal tænke over, hvordan robotten bevæger sig. Humanoide robotter bøjer og vrider sig meget. Dit design skal passe ind i arme og led. Fleksible kredsløb og højfrekvente materialer bruges ofte. Disse valg hjælper dit printkort med at holde længere og fortsætte med at fungere godt.
Design udfordringer
Det er svært at designe humanoide robot-printkortDu har brug for materialer, der kan bøje og håndtere fugt. Du skal være opmærksom på bøjningsradiusen, så printkortet ikke knækker. Fleksible printkort er sværere at samle end stive printkort. Du skal placere hver del omhyggeligt. Højtydende design koster flere penge. Du skal finde en balance mellem kvalitet og pris.
Vigtigste forskelle fra traditionelt printkortdesign
Humanoide robotter bevæger sig og bøjer sig mere end almindelige robotter. Almindelige printkort bevæger sig ikke meget. Humanoide designs skal kunne bøjes og håndtere stress. Du bruger flere sensorer og har brug for bedre strømstyring. Dit printkort skal kunne håndtere mere varme og rystelser.
Fleksible kredsløb
Fleksible kredsløb hjælper robotter med at bevæge sig som mennesker. De giver dig mulighed for at placere sensorer og aktuatorer i bevægelige dele. Du kan bruge mange sensorer til krævende opgaver. Fleksible kredsløb kan bøjes over 200,000 gange. Dette gør dem fremragende til robotter, der bevæger sig meget.
Anvendelse | Fordel |
|---|---|
Integration af sensorer og aktuatorer | Lader leddene bevæge sig naturligt |
Sensorarrays med høj densitet | Hjælper robotter med at udføre komplekse ting |
Fleksibilitet og holdbarhed | Overlever over 200,000 bøjninger for aktive robotter |
Signal- og strømstyring
Du skal holde signalerne klare og strømmen stabil. Brug specielle spor til hurtige signaler. Hold svage signallinjer væk fra stærke strømledninger for at stoppe EMI. Flerlagsprintkort hjælper dig med at opsætte jord- og strømforsyningsplaner. Brug spændingsregulatorer og DC-DC-konvertere til de rigtige spændinger. Tilføj strømsensorer for at overvåge strømforbruget og stoppe overbelastninger. God signal- og strømstyring holder dit printkort sikkert og fungerer godt.
Humanoid Robotics PCB-samling
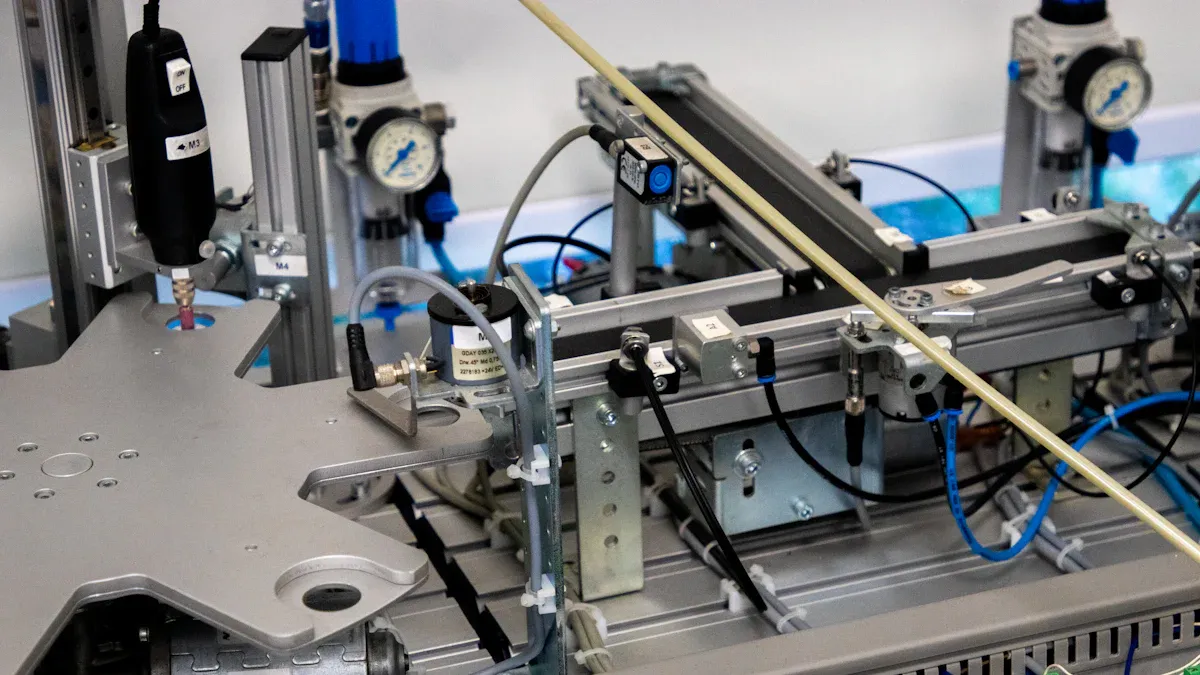
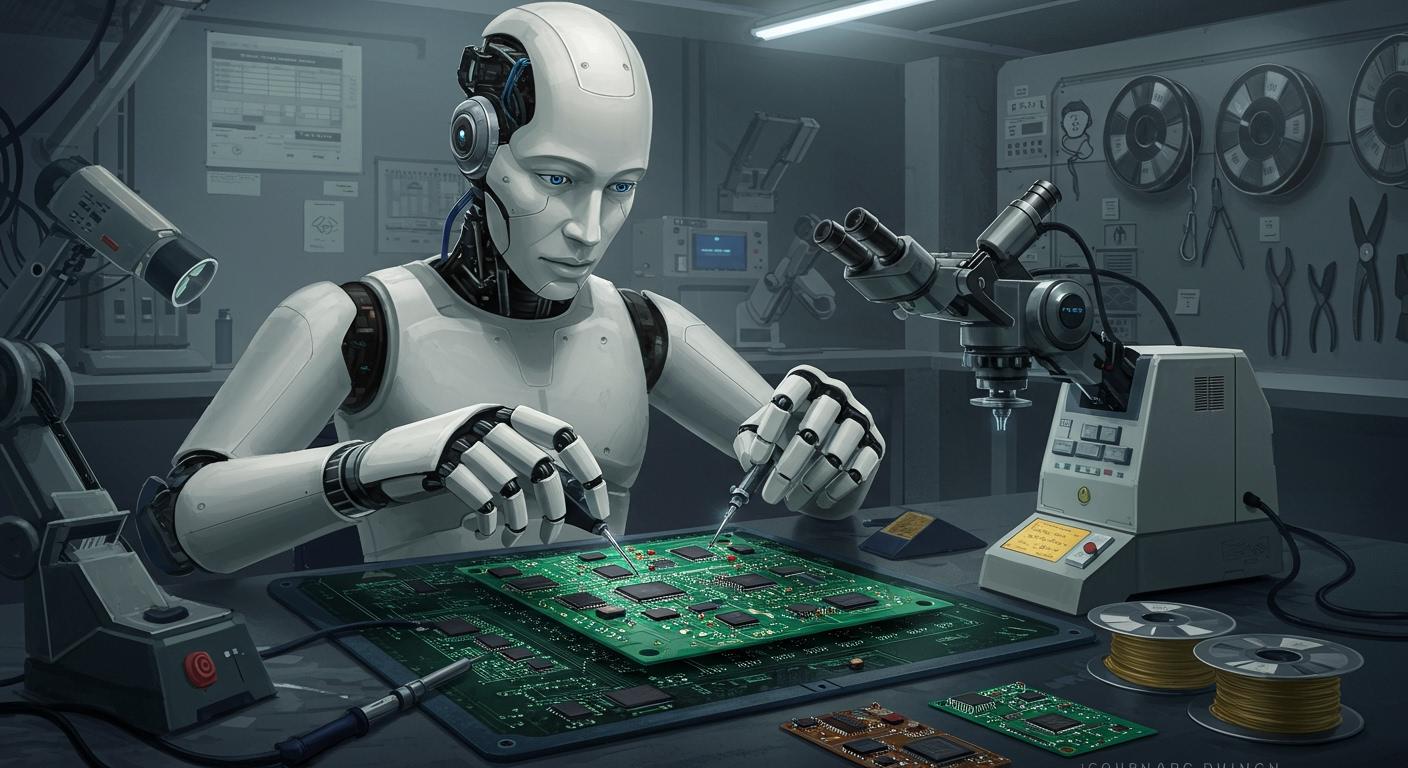
AI-drevet placering
AI-drevet placering ændrer den måde, vi bygger humanoide robot-printkortsamlinger på. Maskiner bruger smarte programmer til at placere små dele på det rigtige sted. Dette hjælper med at placere dele med meget høj nøjagtighed. Det er vigtigt for hukommelsesmoduler og AI-processorer. Du får bedre signaler og laver færre fejl. Robotbaseret SMT gør arbejdet hurtigere og mere pålideligt. Disse systemer udfører hårde job, som folk ikke kan udføre i hånden.
AI-drevet placering giver dig mulighed for at kontrollere, hvor delene placeres.
Du gør printkortproduktion hurtigere og bedre.
Du reducerer fejl og sørger for, at robotterne fungerer godt.
3D-kredsløbsintegration
3D-kredsløbsintegration er nødvendig for at samle nye printkort til humanoide robotter. På denne måde kan du stable og forme printkort til små eller buede rum. Kredsløb kan vikles rundt om samlinger eller passe inde i arme og ben. Printkort med flerlag og metalkerne hjælper med varme og sikkerhed. Du bruger specielle monteringstrin til at forbinde sensorer, aktuatorer og processorer på steder med få plads. Dette gør humanoide robotter stærkere og mere fleksible.
Tip: 3D-kredsløbsintegration sparer plads og hjælper med at styre varmen i dine humanoide robotdesigns.
Testmetoder
Du skal teste alle humanoide robot-printkort for at sikre, at de fungerer. Mange tests hjælper med at finde problemer og holde robotter sikre. Optiske og Røntgentjek Find ting, du ikke kan se. Robotter med kameraer leder efter lodde- og placeringsfejl. Test med flyvende prober kontrollerer kredsløb uden specialværktøj. Højspændingsstresstest finder skjulte problemer, der kan forårsage problemer senere.
Testmetode | Beskrivelse | Fordele |
|---|---|---|
Test af flyvende sonde | Bruger bevægelige sonder til at teste punkter med software. | God til små til mellemstore antal brædder. |
Højspændingsstresstest | Finder isolationsproblemer med højspændingspulser. | Finder fejl, som andre tests måske overser. |
Du tester også for åbne og kortsluttede kredsløb. Du måler modstand og kapacitans. Du kontrollerer for polaritetsfejl og små kortslutninger. Du leder efter faseforskelle. Disse trin hjælper dig med at finde problemer tidligt og holde din printpladesamling stærk.
Højspændingsstresstesten er nøglen til at finde isolationsproblemer. Du sender højspændingspulser mellem signallinjer. Denne test finder problemer, som andre tests måske ikke ser. Disse avancerede tests hjælper med at beskytte dine humanoide robotter mod at svigte.
Stabile forbindelser
Stabile forbindelser er nødvendige i alle printkort til humanoide robotter. Robotter bevæger sig, bøjer og vrider sig meget. Du har brug for stærke loddeforbindelser og gode stik. Fleksible kredsløb hjælper med at holde forbindelserne sikre, når dele bevæger sig. Specielle materialer og design forhindrer ledninger i at knække. Printkort med metalkerne hjælper med at modstå varme og holder forbindelserne stærke. Du kontrollerer hver forbindelse under konstruktionen for at sikre, at din robot fungerer under vanskelige forhold.
Stabile forbindelser holder robotterne sikre og i drift.
Du stopper signaltab og strømproblemer.
Du hjælper din humanoide robotprintplade med at holde længere.
IoT og Emerging Tech
IoT-forbindelse
IoT ændrer, hvordan folk designer og bruger printkortsystemer i humanoide robotter. IoT lader robotter kommunikere med andre enheder og dele information. Dette hjælper robotter med at træffe bedre valg og handle hurtigere. Du har brug for stærke stik til at forbinde motorer, sensorer og processorer. Gode forbindelser hjælper dit printkort med at fungere godt og holde robotterne sikre. AI arbejder sammen med IoT for at hjælpe robotter med at tænke selvstændigt. Når du bygger stærk hardware, kan dine robotter arbejde mange steder.
Stik forbinder hardwaredele, så robotter kan bevæge sig og registrere.
IoT lader robotter dele data og lære af, hvad der er omkring dem.
Kunstig intelligens og IoT hjælper sammen robotter med at træffe deres egne beslutninger.
Stærke forbindelser understøtter motorer, sensorer og processorer for bedre arbejde.
GaN-enheder
GaN-enheder hjælper med at gøre humanoide robotter hurtigere og mere effektive. GaN står for galliumnitrid. Det fungerer bedre end silicium på mange måder. Du får mindre og lettere printplader, der passer i trange rum. GaN hjælper dit printkort med at håndtere mere strøm og varme. Det betyder, at robotter holder længere og bruger mindre energi. Tabellen nedenfor viser, hvorfor GaN er et godt valg til design af robotpcb'er.
Advantage | Beskrivelse |
|---|---|
Høj elektronmobilitet | Du får hurtigere betjening og hurtigere skifthastigheder. |
Bredt båndgab | Dit printkort kan håndtere højere spændinger og forblive pålideligt. |
Fremragende varmeledningsevne | Dine brædder håndterer varme bedre, så robotter forbliver sikre. |
Miniaturiseringsmuligheder | I laver mindre og lettere enheder til kompakte robotter. |
Energieffektivitet | Robotter bruger mindre strøm og arbejder længere, før de oplades. |
Fremtidige tendenser
Du vil se nye ændringer i humanoid Robotdesign og -fremstilling af printkort. IoT vil fortsætte med at vokse, så robotter vil oprette forbindelse til flere enheder. GaN-enheder vil blive brugt mere inden for robotteknologi, hvilket gør printkort mindre og stærkere. Fleksible kredsløb vil hjælpe robotter med at bevæge sig på nye måder. Producenter vil bruge kunstig intelligens til at forbedre, hvordan de bygger og tester robotter. Nye materialer vil hjælpe printkort med at holde længere og fungere bedre. Du skal holde øje med disse ændringer for at forblive på forkant inden for robotteknologi og printkortfremstilling.
Tip: Fortsæt med at lære om nye printkortteknologier og -materialer. Dette hjælper dig med at bygge bedre humanoide robotter og blive førende inden for robotproduktion.
Verifikation i humanoid robot-PCB
Verifikation kontrollerer, om dit printkort fungerer sikkert i alle robotter. Du skal teste både hardware og software. Dette trin hjælper dig med at finde problemer, før du bruger robotten. Du skal bruge stærke tests og følge vigtige regler. God verifikation forhindrer, at din robot fejler, og holder folk sikre.
Verifikationsmål
Sikring af funktionel integritet
Du vil have, at dit printkort fungerer korrekt. Hver del skal udføre sit job. Du kontrollerer, om signalerne bevæger sig korrekt, og om strømmen flyder godt. Du leder efter åbne kredsløb eller kortslutninger, før du laver printkortet. Designgennemgange og regeltjek hjælper dig med at finde fejl tidligt. Høj kvalitet betyder, at din robot vil bevæge sig og reagere, som du ønsker.
Opfylder sikkerheds- og overholdelsesstandarder
Du skal følge sikkerhedsreglerne inden for robotteknologi. Disse regler beskytter mennesker og maskiner. Mange grupper laver disse regler, såsom OSHA, ISO og ANSI. Du skal kontrollere, om dit printkort opfylder disse regler, før du fremstiller det.
OSHA laver regler for at mindske sundheds- og sikkerhedsrisici på arbejdspladsen i USA. OSHA ønsker også, at virksomheder uddanner og underviser medarbejdere i at holde arbejdet sikkert og sundt.
Her er nogle vigtige standarder for humanoid robotteknologi:
Standard/Forskrift | Beskrivelse |
|---|---|
ISO 10218 | Fastsætter regler for sikkerheden af industrirobotter. |
ISO 13849 | Fokuserer på sikkerhedsdelene i styresystemer. |
ANSI/RIA R15.06 | Sørger for, at sikkerheden for kollaborative robotter er den samme i USA |
CSA Z434 | Dækker sikkerheden ved kollaborative robotter i Canada. |
ISO 13482 | Er til personlig pleje og servicerobotter. |
Du skal også følge regler fra grupper som FAA, FCC, FDA og privatlivslove.
Validering af sensor- og AI-integration
Sensorer og AI-moduler hjælper din robot sanse og tænke. Du skal kontrollere, om disse dele fungerer sammen. Du tester, om sensorer sender de rigtige data, og om AI-chips behandler dem hurtigt. Du sørger for, at dit printkort kan håndtere mange sensorer og smarte moduler. Dette trin holder din robot smart og sikker.
Verifikationsmetoder
Simulation og modellering
Du bruger simuleringsværktøjer til at teste dit printkort, før du bygger det. Disse værktøjer viser, hvordan signaler bevæger sig, og hvordan varme spredes. Du kan finde problemer tidligt og løse dem i dit design. Modellering hjælper dig med at spare tid og penge.
In-Circuit Testing (IKT)
In-circuit testning kontrollerer hver del på dit printkort. Du bruger prober til at teste forbindelser og lede efter kortslutninger eller åbne kredsløb. IKT hjælper dig med at finde problemer, der kan forhindre din robot i at fungere. Denne metode er meget vigtig for komplekse designs med flere lag.
Funktionstest
Funktionstest kontrollerer, om dit printkort gør, hvad du ønsker. Du kører printkortet og ser, om det styrer motorer, sensorer og AI-chips. Du leder efter fejl i realtid. Dette trin sikrer, at din robot kan bevæge sig, registrere og reagere som planlagt.
Miljø- og stresstest
Du tester dit printkort under barske forhold. Du ryster det, opvarmer det og køler det ned. Du tjekker, om det fungerer efter mange bøjninger og vridninger. Miljø- og stresstestning hjælper dig med at se, om dit printkort kan holde i en rigtig robot. Du ønsker, at dit printkort skal kunne modstå vibrationer, varme og EMI.
Udfordringer ved verifikation
Du skal opretholde høj kvalitet i dit printkort for korrekt robotarbejde.
Du skal mindske risici, især i sikkerhedsjob.
Du skal gennemgå dit design og kontrollere for åbne kredsløb eller kortslutninger, før du laver det.
Kompleksiteten af flerlagsdesigns
Flerlagede printkort gør det sværere at kontrollere. Du har flere forbindelser og flere steder til fejl. Du har brug for stærke tests til at kontrollere hvert lag. Designregeltjek hjælper dig med at finde skjulte problemer.
Validering af databehandling i realtid
Humanoide robotter har brug for hurtig databehandling. Du skal teste, om dit printkort kan håndtere realtidssignaler fra sensorer og AI-chips. Du leder efter forsinkelser eller fejl, der kan bremse din robot.
Integration af fleksible og stive kredsløb
Du bruger ofte både fleksible og stive kredsløb i humanoide robotter. Du skal kontrollere, om disse dele fungerer sammen. Du tester, om forbindelserne forbliver stærke efter mange bøjninger. Dette trin hjælper dit printkort med at holde længere i robotter i bevægelse.
Bedste praksis for verifikation
Best Practice | Beskrivelse |
|---|---|
Indsamling af robuste pålidelighedsdata | Nødvendig for fremtidig standardjustering ud over gamle metoder. |
Implementering af redundante sikkerhedsstyringssystemer | Nødvendig for at tilsidesætte højniveau-autonomi ved hjælp af stærke sensorer. |
Følger etablerede sikkerhedsstandarder | Følg ISO 13849 og ANSI/RIA-reglerne for robotsikkerhed. |
Tidlig verifikation i designcyklussen
Start med at tjekke tidligt. Du opdager fejl, før de bliver store. Tidlige kontroller sparer tid og penge.
Automatiserede testsystemer
Brug automatiserede testsystemer til at kontrollere dit printkort. Maskiner kan teste hurtigere og finde flere fejl end mennesker. Automatiserede systemer hjælper dig med at opretholde høj kvalitet i hvert printkort.
Kontinuerlig feedback og iteration
Bliv ved med at teste og forbedre dit printkort. Brug feedback fra hver test til at forbedre dit design. Løbende kontroller hjælper dig med at bygge sikrere og stærkere robotter.
Tip: Humanoide robot-printkort kræver mere testning end almindelige robotter. Du skal bruge test i kredsløbet, funktionstest og endda røntgentjek for at sikre, at alle dele fungerer. Generelle robot-printkort kræver muligvis ikke så strenge kontroller.
verifikation
Du skal sørge for, at din humanoide robots printkort fungerer som planlagt. Verifikation betyder, at du kontrollerer hver del og hvert trin. Du ønsker, at din robot skal bevæge sig, sanse og tænke uden fejl. Hvis du springer dette trin over, kan din robot fejle eller endda blive usikker.
Tip: Altid test dit printkort før du bruger den i en robot. Dette hjælper dig med at finde problemer tidligt.
Du kan bruge forskellige måder at verificere dit printkort på:
Visuel inspektion: Se på printkortet. Kontroller for manglende dele eller dårlige loddeforbindelser.
Automatiseret test: Brug maskiner til at teste kredsløb og forbindelser. Maskiner finder små fejl, som du måske overser.
Simulation: Prøv dit design på en computer. Se hvordan signaler bevæger sig, og hvordan varme spredes.
Funktionel testning: Kør boardet med motorer og sensorer. Se om alt fungerer som det skal.
Miljøtest: Placer dit printkort på varme, kolde eller rystende steder. Sørg for, at det stadig fungerer.
Her er en tabel, der kan hjælpe dig med at huske de vigtigste verifikationstrin:
Trin | Hvad du tjekker |
|---|---|
Visuel inspektion | Dele, lodning og printpladeform |
automatiseret Test | Kredsløb, kortslutninger og åbne linjer |
Simulation | Signalflow og varme |
Funktionstest | Motorer, sensorer og AI-chips |
Miljøtest | Varme, kulde og vibrationer |
Du bør føre optegnelser over dine tests. Skriv ned, hvad du finder. Hvis du ser et problem, så ret det og test igen. God verifikation hjælper dig med at bygge sikre og intelligente robotter. Du kan stole på dit printkort, når du følger disse trin.
Du kan lave bedre humanoide robotter ved at bruge gode printkortdesigntrin. Opdel store opgaver i mindre opgaver for at hjælpe med samlingen. Tænk på folks behov for at gøre bygninger mere sikre. Tabellen nedenfor viser måder at blive ved med at forbedre sig på:
Strategi | Beskrivelse |
|---|---|
Hierarkisk opgaveopdeling | Opdeler svære opgaver i lette trin. |
Menneske-Centrisk Design | Sætter mennesker først for at sikre mere sikker bygning. |
Proaktivt integreret design | Bruger smart talk til bedre teamwork. |
Nye materialer, kunstig intelligens og IoT hjælper med at lave stærkere printkort til humanoide robotter. Fortsæt med at lære om ny robotteknologi for at sikre, at dit printkort fungerer godt, og at dine robotter er klar til det, der kommer.
Ofte stillede spørgsmål
Hvad adskiller humanoide robot-PCB'er fra almindelige PCB'er?
Humanoide robot-printkort bruger fleksible kredsløb og specielle materialer. De har også mange sensorer. Disse funktioner hjælper robotter med at bevæge sig, bøje og tænke. Almindelige printkort behøver ikke at håndtere så meget bevægelse. De udfører heller ikke så mange vanskelige opgaver.
Hvordan tester man et humanoid robot-PCB?
Du ser på tavlen med dine øjne. Du bruger maskiner til at kontrollere for fejl. Du afprøver dit design på en computer. Du udfører tests med motorer og sensorer. Du tester også med varme og rystelser. Disse trin hjælper dig med at finde problemer tidligt.
Hvorfor har humanoide robotter brug for fleksible kredsløb?
Fleksible kredsløb passer i arme, ben og led. Du kan bøje og vride dem mange gange. Dette hjælper din robot med at bevæge sig som et menneske. Det holder også forbindelserne stærke.
Hvilke materialer fungerer bedst til humanoide robot-PCB'er?
Du skal bruge DuPont Pyralux TK og Panasonic FELIOS R-F775. Disse materialer hjælper dit printkort med at holde længere. De håndterer varme og understøtter hurtige signaler. De gør også din robot mere sikker og pålidelig.
Kan du nemt opgradere sensorer og AI-moduler?
Ja! Du kan tilføje nye sensorer eller AI-chips, når du vil. Du behøver ikke at udskifte hele printkortet. Åbne designs og smarte moduler hjælper dig med at opgradere, efterhånden som teknologien bliver bedre.
Tip: Hold altid dit printkortdesign åbent for opgraderinger. Dette hjælper din robot med at forblive smart og klar til nye opgaver.