กรณีศึกษา
กรณีศึกษาทางเทคนิคเกี่ยวกับเครื่องสแกนวินิจฉัยยานยนต์ จากการจัดส่งมากกว่า 200,000 เครื่องในสายการผลิตแบบ ODM หลายสาย ครอบคลุมถึงการตัดสินใจด้านสถาปัตยกรรมที่เกิดขึ้นจริง ความล้มเหลวในภาคสนามที่ทำให้เราต้องเปลี่ยนแปลงกฎเกณฑ์เกี่ยวกับแผงวงจรพิมพ์ (PCB) และข้อมูลเบื้องหลังสิ่งที่ขับเคลื่อนการส่งคืนสินค้าอย่างแท้จริง
| 200k +หน่วยที่จัดส่งแล้ว | 4.2% → 0.3%อัตราความล้มเหลวในการสื่อสาร | 68% RMA: ข้อมูล OEM ขาดหาย | % 40-60ความคุ้มครองที่เพิ่มขึ้นอย่างแท้จริง |
1. ภาพรวมโครงการ
1.1 ประวัติลูกค้า
ลูกค้าเป็นแบรนด์อุปกรณ์บริการยานยนต์ที่มีผลิตภัณฑ์เครื่องมือ OBD ระดับเริ่มต้นอยู่แล้ว เช่น อะแดปเตอร์ที่ใช้ชิป ELM327 และเครื่องอ่านรหัสพื้นฐาน พวกเขาต้องการยกระดับไปสู่ผลิตภัณฑ์สแกนเนอร์แบบหลายระบบระดับมืออาชีพ
กลุ่มเป้าหมาย: ร้านซ่อมอิสระ, ธุรกิจบำรุงรักษารถยนต์สำหรับองค์กร และศูนย์บริการของตัวแทนจำหน่ายรถยนต์ ตลาดเป้าหมายตั้งแต่แรกคืออเมริกาเหนือและยุโรป โดยมีเอเชียเป็นเป้าหมายในระยะที่สอง

ช่องว่างที่พวกเขากำลังพยายามอุดนั้นมีอยู่จริง เครื่องมือระดับเริ่มต้นอ่านรหัสระบบส่งกำลังทั่วไปได้ แต่ร้านซ่อมรถยนต์ระดับมืออาชีพต้องการข้อมูล ABS, SRS, ระบบเกียร์, TPMS, ระบบควบคุมทิศทาง และข้อมูล ECU แบบเรียลไทม์จากรถยนต์หลายสิบยี่ห้อ การเปลี่ยนแปลงนี้ไม่ใช่แค่การอัปเดตเฟิร์มแวร์ แต่เป็นการเปลี่ยนแปลงฮาร์ดแวร์และซอฟต์แวร์อย่างสิ้นเชิง
ยังอ่าน: กรณีศึกษาแท็บเล็ตทนทาน
1.2 เป้าหมายของโครงการ
• การปฏิบัติตามมาตรฐาน OBD-II อย่างเต็มรูปแบบเป็นขั้นต่ำ ไม่ใช่ขั้นสูงสุด
• รองรับหลายโปรโตคอล ได้แก่ CAN, LIN และ FlexRay
• การวิเคราะห์ข้อมูล ECU แบบเรียลไทม์ด้วยความหน่วงต่ำ
• การเชื่อมต่อไร้สายสำหรับการซิงค์ข้อมูลบนคลาวด์และการวินิจฉัยระยะไกล
• ความทนทานระดับอุตสาหกรรม เหมาะสำหรับสภาพแวดล้อมในโรงงานหรือห้องปฏิบัติการ
• แบบดีไซน์พร้อมสำหรับการผลิต ผ่านการรับรองมาตรฐานสากลแล้ว
• เส้นทางการอัปเกรดที่ชัดเจนสำหรับการวินิจฉัยรถยนต์ไฟฟ้าโดยไม่ต้องออกแบบฮาร์ดแวร์ใหม่ทั้งหมด
2. ความท้าทายในอุตสาหกรรมการพัฒนาเครื่องมือวินิจฉัยยานยนต์
2.1 ความเข้ากันได้ของหลายโปรโตคอล
คำกล่าวอ้าง “รองรับรถยนต์มากกว่า 95%” นั้นปรากฏอยู่บนกล่องสแกนเนอร์ทุกเครื่องในท้องตลาด หลังจากจัดส่งสแกนเนอร์ ELM327 รุ่นเลียนแบบและแท็บเล็ตมัลติโปรโตคอลไปแล้วกว่า 200,000 เครื่อง เราสามารถบอกคุณได้อย่างแน่ชัดว่าตัวเลขนั้นซ่อนอะไรเอาไว้
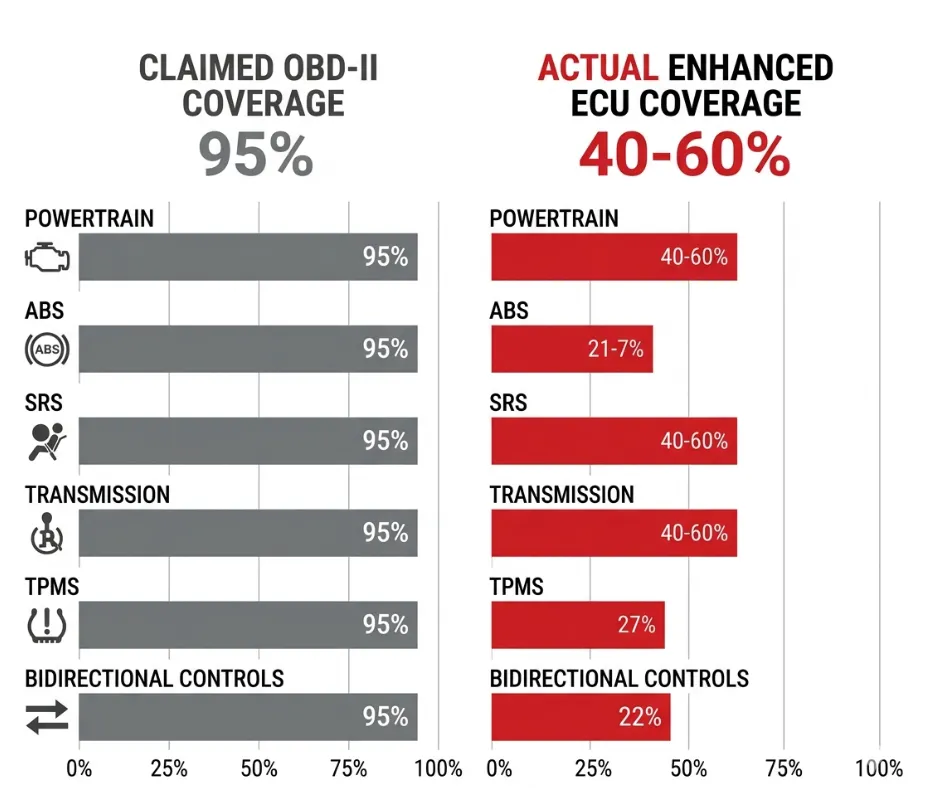
อุปกรณ์นี้รองรับเฉพาะมาตรฐาน OBD-II ขั้นพื้นฐานตามกฎหมายเท่านั้น ได้แก่ โหมด 01 ถึง 0A ของ SAE J1979 และ ISO 15031 บนโปรโตคอลดั้งเดิม 5 แบบ ได้แก่ ISO 9141-2, ISO 14230-4 KWP2000, SAE J1850 PWM และ VPW และ ISO 15765-4 CAN ที่ความเร็ว 250 และ 500 kbps นั่นหมายความว่าอุปกรณ์นี้สามารถอ่านค่า PID ของระบบส่งกำลัง สถานะ MIL และข้อมูลเฟรมหยุดนิ่ง (freeze-frame) ทั่วไปของรถยนต์ในสหรัฐอเมริการุ่นปี 1996 ขึ้นไปที่ตรงตามข้อกำหนดขั้นต่ำตามกฎหมายได้
สิ่งที่ไม่ครอบคลุม: PID ที่ผู้ผลิตกำหนด, การเข้าถึงโมดูล ABS/SRS/ระบบส่งกำลัง/TPMS, การควบคุมแบบสองทิศทาง, การปรับแต่ง หรือ seed สำหรับการเข้าถึงด้านความปลอดภัย รถยนต์หลังปี 2018 ที่ใช้ UDS บน CAN หรือ CAN FD ยิ่งทำให้ช่องว่างนี้กว้างขึ้นไปอีก เมื่อเราทำการทดสอบกับรถยนต์ 50 คันของเราเอง เครื่องสแกนที่อ้างว่ามีความเข้ากันได้พื้นฐาน 95% กลับมีความเข้ากันได้เฉลี่ยเพียง 40 ถึง 60 เปอร์เซ็นต์สำหรับข้อมูลเพิ่มเติมในรถยนต์ที่ไม่ใช่รุ่น USDM
| วิศวกรจัดซื้อจัดจ้างควรเรียกร้อง: ตารางแสดงรายละเอียดการครอบคลุมที่ได้รับการปรับปรุงจากผู้ผลิต (OEM) ในรูปแบบ Excel โดยแยกตามยี่ห้อ รุ่น และปี – แสดงรหัสข้อผิดพลาด (DTC) ที่ได้รับการปรับปรุงที่รองรับต่อ ECU สถานะ CAN FD และ DoIP ความสามารถในการส่งผ่าน J2534 และความถี่ในการอัปเดตฐานข้อมูล ส่วนข้อมูลอื่นๆ เป็นเพียงการตลาด |
2.2 ความเสถียรในการสื่อสารของ ECU
สภาพแวดล้อมทางไฟฟ้าในรถยนต์นั้นไม่เอื้ออำนวย หัวฉีดดีเซลแบบคอมมอนเรล เสียงรบกวนจากการสลับการทำงานของอัลเทอร์เนเตอร์ และเหตุการณ์โหลดกระชากขณะสตาร์ทเครื่องยนต์ ล้วนสร้างสัญญาณรบกวนชั่วขณะที่การทดสอบบนแท่นทดสอบไม่สามารถตรวจจับได้ แรงดันไฟฟ้าที่พอร์ต OBD จะแกว่งจาก 9V ถึง 36V ขึ้นอยู่กับรถยนต์ สถานะการชาร์จ และสิ่งอื่นๆ ที่กำลังทำงานอยู่บนบัส การป้องกันการกลับขั้วไม่ใช่สิ่งที่ไม่จำเป็น แต่เป็นส่วนหนึ่งของเงื่อนไขการรับประกัน
เราเรียนรู้เรื่องนี้ด้วยประสบการณ์ตรง โครงการ ODM ปี 2023 ที่ใช้ชิป GD32F103 SoC พร้อมทรานซีฟเวอร์ CAN รุ่น TJA1050 ผ่านการทดสอบบนแท่นทดสอบ 100 เปอร์เซ็นต์ — ไดอะแกรมตาที่สะอาด ไม่มีการสูญเสียแพ็กเก็ตที่ 500 kbps แต่ความล้มเหลวในการใช้งานจริงครั้งแรกเกิดขึ้นที่ศูนย์บริการในยุโรปกับรถ Mercedes Sprinter ดีเซล ปี 2019 อุปกรณ์หลุดจากบัสเป็นระยะ แสดงรหัส U0100 การสื่อสารขาดหาย และการล้าง DTC เสียหาย สาเหตุหลัก: ไดโอด TVS ขนาดเล็กเกินไปและโช้คโหมดร่วมที่หายไปบน CANH และ CANL แรงดันไฟฟ้าชั่วขณะตามมาตรฐาน ISO 7637-2 Pulse 3a และ 3b — สูงถึง +/-150V ระหว่างการสตาร์ทเครื่องยนต์ — ส่งผ่านโดยตรงไปยังขั้วต่อ OBD ทรานซีฟเวอร์รอดจากการทดสอบบนแท่นทดสอบ แต่ล้มเหลวในการใช้งานจริงหลังจากใช้งานสะสมประมาณ 200 ชั่วโมง
2.3 ความซับซ้อนของฐานข้อมูลซอฟต์แวร์
ข้อมูล RMA ของเราจากอุปกรณ์ 120,000 ชิ้นในช่วง 18 เดือน แสดงให้เห็นว่า 68 เปอร์เซ็นต์ของการส่งคืนระบุว่า “ใช้งานไม่ได้กับรถ XYZ ปี 2024 ของฉัน” — แม้ว่าฮาร์ดแวร์จะรองรับโปรโตคอลที่ถูกต้องก็ตาม อาจเป็นเพราะข้อมูลในฐานข้อมูลเฉพาะของ OEM หายไป หรือการเจรจาต่อรองรหัสความปลอดภัยล้มเหลวโดยไม่มีการแจ้งเตือน อุปกรณ์ที่มีการอัปเดตฐานข้อมูล OTA ไม่บ่อยนัก จะมีอัตราการส่งคืน 18 ถึง 22 เปอร์เซ็นต์เมื่อมีรุ่นปีใหม่วางจำหน่าย นี่เป็นปัญหาทางธุรกิจ ไม่ใช่ปัญหาด้านฮาร์ดแวร์
2.4 สภาพแวดล้อมการทำงานในโรงงานที่ทนทาน
ช่างยนต์ไม่ได้ดูแลรักษาแท็บเล็ตวินิจฉัยอย่างระมัดระวัง พวกเขาเสียบเครื่องสแกนทิ้งไว้ขณะทำการทดสอบไดนาโม การสตาร์ทเครื่องยนต์ และการจั๊มสตาร์ท เครื่องมืออาจถูกทำตกจากขอบประตูรถ เปื้อนน้ำมัน และถูกทิ้งไว้ในรถตู้ที่เย็นจัดข้ามคืน ช่วงอุณหภูมิการทำงานตั้งแต่ -10 ถึง 55 องศาเซลเซียส ไม่ใช่ตัวเลขในเอกสารข้อมูลจำเพาะ แต่เป็นช่วงอุณหภูมิที่เครื่องสแกนตรวจจับได้จริง ตั้งแต่เช้าวันหนึ่งในเดือนมกราคมในอู่ซ่อมรถในมินนิโซตา ไปจนถึงห้องเครื่องยนต์ในฤดูร้อนของเท็กซัส
3. การออกแบบสถาปัตยกรรมระบบ
3.1 แพลตฟอร์มการประมวลผลหลัก
หน่วยประมวลผลแอปพลิเคชันหลักคือ ARM Cortex-A ซีรีส์ที่ทำงานบนระบบปฏิบัติการ Android หรือ Linux แบบฝังตัว Android ชนะเลิศในด้านความเร็วในการพัฒนา UI และความสมบูรณ์ของระบบนิเวศ OTA ในขณะที่ Linux มีความสะอาดกว่าสำหรับเส้นทางการวินิจฉัยที่ไวต่อความหน่วงแฝง ไมโครคอนโทรลเลอร์ (MCU) เฉพาะจะจัดการเลเยอร์ควบคุมการสื่อสารแยกต่างหาก การแยกหน่วยประมวลผลแอปพลิเคชันออกจากบัสของรถยนต์ช่วยลดความหน่วงแฝง ปรับปรุงการแยกข้อผิดพลาด และป้องกันไม่ให้ซอฟต์แวร์ขัดข้องจนทำให้เซสชัน ECU ที่ใช้งานอยู่หยุดทำงาน เป้าหมายเวลาในการบูตคือต่ำกว่า 10 วินาที ตั้งแต่เปิดเครื่องจากสถานะเย็นจนถึงสถานะพร้อมสำหรับการวินิจฉัย
3.2 อินเทอร์เฟซการสื่อสารยานยนต์
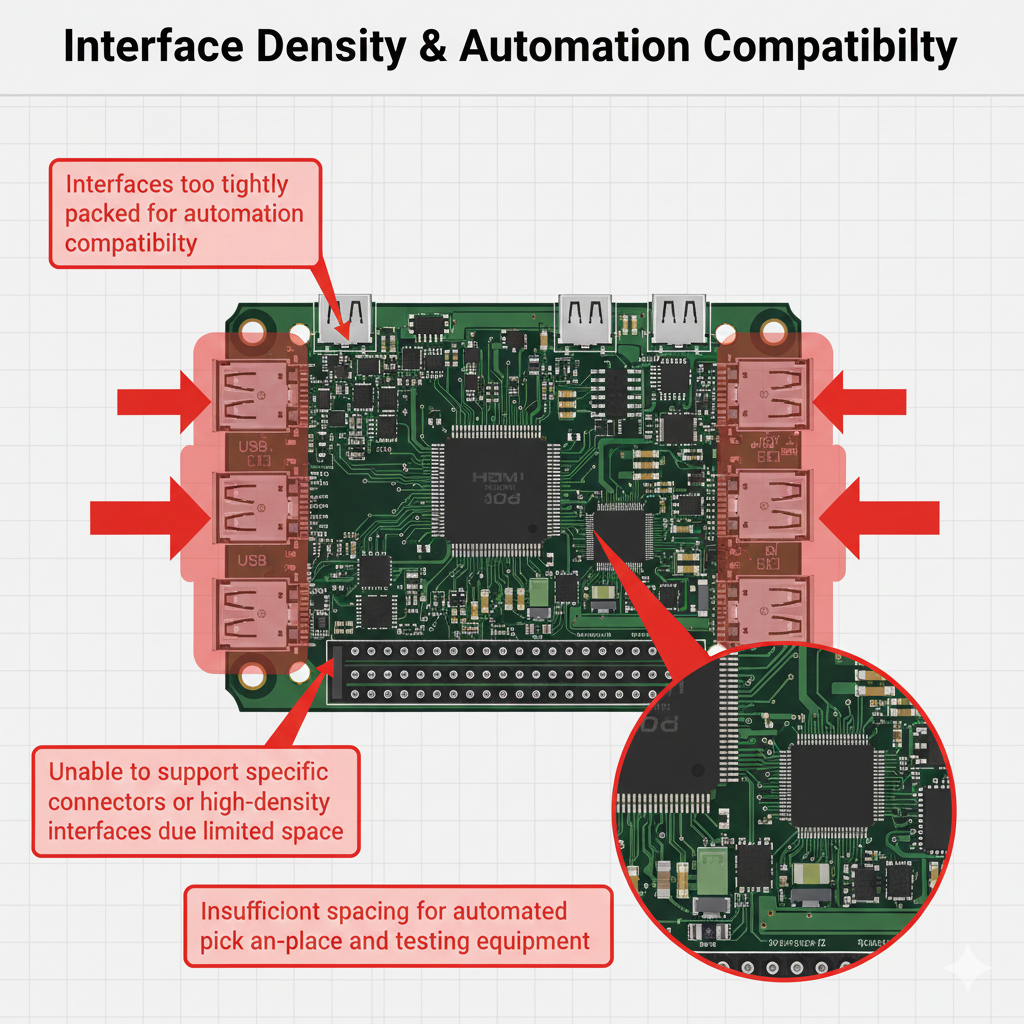
ขั้วต่อ OBD-II 16 พินเป็นจุดเริ่มต้น แต่ชั้นทางกายภาพที่อยู่เบื้องหลังนั้นเป็นจุดที่การออกแบบส่วนใหญ่ล้มเหลว สถาปัตยกรรมนี้ใช้ทรานซีฟเวอร์ CAN ความเร็วสูงและความเร็วต่ำ ไอซีไดรเวอร์ K-line และ L-line ที่เหมาะสม — ไม่ใช่ทรานซิสเตอร์แบบแยกชิ้น — ทรานซีฟเวอร์ LIN และ DoIP ผ่านอีเธอร์เน็ต (เป็นตัวเลือกเสริม) สำหรับแพลตฟอร์มรุ่นปี 2020 ขึ้นไป
การเลือกใช้ไดรเวอร์ K-line นั้นสำคัญกว่าที่คิด การใช้งานแบบแยกชิ้นส่วนราคาถูกนั้นขาดความทนทานต่อแรงดัน 12V การควบคุมอัตราการเปลี่ยนแปลงแรงดัน และการปิดระบบเมื่ออุณหภูมิสูงเกินไปเหมือนกับ IC เฉพาะทางอย่าง L9637 ใน ECU รุ่นเก่าจากเอเชียและยุโรปที่ดึงแรงดันไปที่ 12V ระหว่างการเริ่มต้นระบบ ความแตกต่างจะปรากฏให้เห็นเป็นการสื่อสารที่ไม่ต่อเนื่อง ซึ่งแทบเป็นไปไม่ได้เลยที่จะแก้ไขปัญหาในภาคสนาม การรองรับ DoIP นั้นต้องการ Ethernet PHY แม่เหล็ก และสแต็ก TCP/IP บน MCU ซึ่งจะเพิ่มต้นทุน BOM อีก 8 ถึง 12 ดอลลาร์ก่อนที่จะคำนึงถึงความซับซ้อนของเฟิร์มแวร์ ไม่ใช่แค่การเลือกตัวเลือกในซอฟต์แวร์
3.3 การเชื่อมต่อไร้สาย
• Wi-Fi 5 และ 6 เพื่อการซิงค์ฐานข้อมูลความเร็วสูงและการบันทึกเซสชันบนคลาวด์
• บลูทูธ 5.0 สำหรับการเชื่อมต่อกับคอมพิวเตอร์ในศูนย์ซ่อมและแสดงผลระยะไกล
• โมดูล 4G LTE (อุปกรณ์เสริม) สำหรับการวินิจฉัยปัญหาผ่านระบบคลาวด์จากยานพาหนะในภาคสนาม
• โมดูล LTE ยังรองรับการให้ความช่วยเหลือจากช่างเทคนิคระยะไกลด้วยการแชร์สตรีมข้อมูลแบบเรียลไทม์
3.4 การจัดเก็บข้อมูลและความปลอดภัย
หน่วยความจำ eMMC ขนาด 32 ถึง 128GB ขึ้นอยู่กับระดับ SKU ฐานข้อมูลยานยนต์เพียงอย่างเดียว ซึ่งครอบคลุมรายละเอียดเฉพาะของ OEM สำหรับแบรนด์ในสหรัฐอเมริกา สหภาพยุโรป และเอเชีย มีขนาดมากกว่า 20 GB ก่อนที่จะรวมบันทึกและบันทึกเซสชัน สถาปัตยกรรมการอัปเดตเฟิร์มแวร์ที่ปลอดภัยใช้แพ็คเกจการอัปเดตที่ลงนามแล้ว ห่วงโซ่การบูตที่ได้รับการตรวจสอบ และช่องทาง OTA ที่เข้ารหัส การตรวจสอบสิทธิ์ผู้ใช้และช่องทางการสื่อสารที่เข้ารหัสเป็นสิ่งจำเป็นสำหรับเครื่องมือระดับมืออาชีพใด ๆ ที่จำหน่ายให้กับกลุ่มลูกค้าองค์กรหรือตัวแทนจำหน่าย
4. วิศวกรรมแผงวงจรพิมพ์และฮาร์ดแวร์
4.1 การออกแบบแผงวงจรพิมพ์หลายชั้น
เหตุการณ์ความล้มเหลวของ Mercedes Sprinter ในปี 2023 ทำให้เราต้องเปลี่ยนแปลงกฎเกณฑ์การออกแบบ PCB การตรวจสอบภายหลังพบว่ามีสัญญาณรบกวนบนสาย CAN เกิน 2Vpp ซึ่งเป็นการละเมิดมาตรฐาน ISO 11898-2 โดยตรง สาเหตุเกิดจากการกรองสัญญาณรบกวนแบบ common-mode ที่ไม่เพียงพอและการแยกชั้นกราวด์ที่ไม่ดี เราจึงเปลี่ยนไปใช้โครงสร้างแบบ 6-8 ชั้น โดยมีชั้นกราวด์แบบอนาล็อกโดยเฉพาะอยู่ใต้ส่วนรับส่งสัญญาณ ไม่มีเส้นทางสัญญาณดิจิทัลใดๆ ตัดผ่านบริเวณบัส CAN มีการเชื่อมต่อผ่านรูทุกๆ 5 มม. รอบส่วนอนาล็อก การจัดวาง EMI เป็นข้อจำกัดในขั้นตอนแรก ไม่ใช่รายการตรวจสอบหลังการออกแบบ
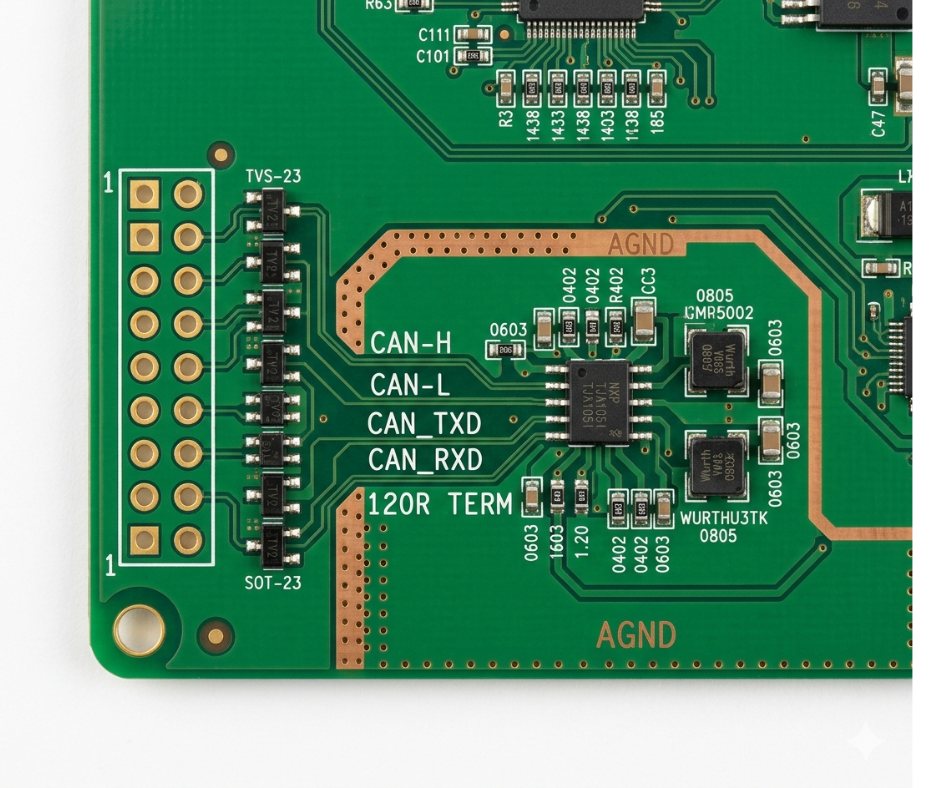
ใช้ส่วนประกอบคุณภาพระดับยานยนต์ตลอดทั้งระบบ: ทนต่ออุณหภูมิได้หลากหลายระดับ, ผ่านการรับรองมาตรฐาน AEC-Q100 ในกรณีที่เกี่ยวข้อง, เลือกใช้ IC ที่มีอายุการใช้งานยาวนาน พร้อมกลยุทธ์การทดแทนที่บันทึกไว้ก่อนการผลิต ส่วนของชั้นกายภาพใช้ ASIC front-end เฉพาะสำหรับโปรโตคอล พร้อมตรรกะการยุติและการระงับพัลส์ที่ตั้งโปรแกรมได้
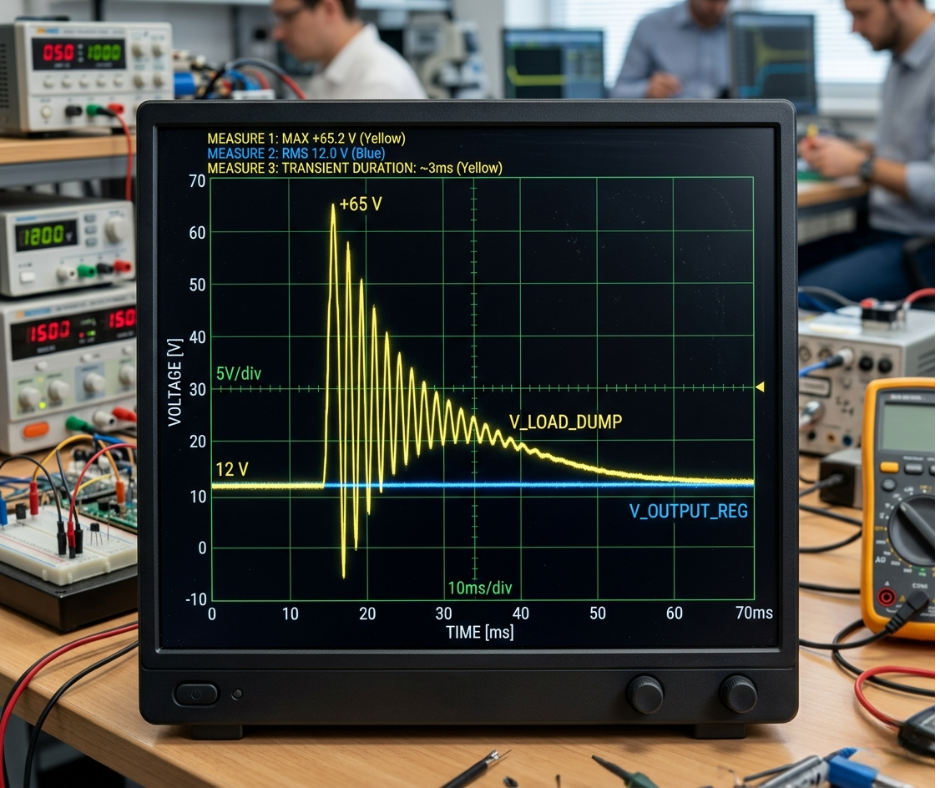
4.2 การออกแบบการจัดการพลังงาน
ระบบป้องกันแรงดันไฟฟ้าขาเข้าครอบคลุมช่วงแรงดันไฟฟ้าของรถยนต์ตั้งแต่ 9V ถึง 36V ระบบป้องกันกระแสไฟกระชากจะจัดการกับกระแสไฟชั่วขณะเมื่อแบตเตอรี่ถูกตัดการเชื่อมต่อจากเครื่องกำเนิดไฟฟ้าที่กำลังทำงานอยู่ ซึ่งเหตุการณ์ดังกล่าวจะสร้างกระแสไฟกระชากสูงกว่า 60V ที่อาจทำลายวงจรที่ไม่มีการป้องกัน ไดโอด TVS ในปัจจุบันเป็นแบบอาร์เรย์สองทิศทางที่ได้รับการจัดอันดับตามมาตรฐาน ISO 7637-3 ไม่ใช่ชิ้นส่วน P6KE6.8A ที่ล้มเหลวในโครงการ Sprinter รุ่นพกพามีระบบจัดการแบตเตอรี่เพิ่มเติมสำหรับการใช้งานแบบไร้สายในระหว่างการตรวจสอบสภาพรถยนต์
4.3 การป้องกันไฟฟ้าสถิตและกระแสไฟกระชาก
ทุกพิน OBD มีระบบป้องกัน TVS แบบสองทิศทางตามมาตรฐาน IEC 61000-4-2 ESD, เฟอร์ไรต์แบบอนุกรม และตัวกรองโหมดร่วม 100nF บวก 100pF การปฏิบัติตามมาตรฐาน ISO 7637 เป็นมาตรฐานที่บันทึกไว้ ข้อกำหนดการป้องกันที่เราออกแบบนั้นเข้มงวดกว่า เนื่องจากสภาพการใช้งานจริงในโรงงานซ่อมรถยนต์นั้นเกินกว่าที่รุ่นมาตรฐานกำหนดไว้
5. ซอฟต์แวร์และฟังก์ชันการวินิจฉัย
5.1 คุณสมบัติการวินิจฉัยหลัก
• อ่านและล้างรหัสข้อผิดพลาด (DTC) ใน ECU ที่รองรับทั้งหมด ไม่ใช่แค่เฉพาะระบบส่งกำลังเท่านั้น
• การตรวจสอบข้อมูลแบบเรียลไทม์ พร้อมการเลือก PID ที่ปรับแต่งได้ และการแสดงผลเป็นกราฟ
• การบันทึกภาพนิ่งขณะเกิดข้อผิดพลาด
• สถานะการตรวจสอบความพร้อมสำหรับการทดสอบการปล่อยมลพิษ
• การทดสอบเซ็นเซอร์ O2 และการทดสอบการรั่วไหลของระบบ EVAP ตามโหมด OBD-II 08
นี่คือคุณสมบัติที่กฎหมายกำหนดไว้ สแกนเนอร์ทุกตัวในท้องตลาดมีคุณสมบัติเหล่านี้ คำถามคือว่ามันทำงานได้อย่างน่าเชื่อถือแค่ไหนในระบบการครอบคลุมรถยนต์แบบเต็มรูปแบบ ไม่ใช่ว่ามันมีอยู่จริงหรือไม่
5.2 ฟังก์ชั่นขั้นสูง
การเข้ารหัสและการตั้งโปรแกรม ECU สำหรับแพลตฟอร์มที่รองรับ — โดยมีข้อควรระวังที่สำคัญ การบายพาสเกตเวย์ความปลอดภัยแบบเต็มรูปแบบนั้นไม่สามารถใช้งานได้กับแพลตฟอร์มรถยนต์หรูและรถยนต์ไฟฟ้าทุกรุ่นตั้งแต่ปี 2024 เป็นต้นไป โมดูลเฉพาะของ Mercedes, BMW และ Tesla บางรุ่นใช้ระบบรักษาความปลอดภัยแบบ rolling-code หรือ certificate-based ซึ่งเราไม่สามารถถอดรหัสได้ นี่เป็นเจตนาของเรา เราแนะนำให้ลูกค้าใช้สแกนเนอร์เป็นเครื่องมือในการคัดกรองและซ่อมบำรุง ไม่ใช่ใช้แทนอุปกรณ์ PASSTHRU ของตัวแทนจำหน่ายเมื่อจำเป็นต้องตั้งโปรแกรม ECU จริงๆ
สำหรับงานซ่อมรถยนต์ประจำวัน 95 เปอร์เซ็นต์ เครื่องสแกนก็เพียงพอแล้ว สำหรับอีก 5 เปอร์เซ็นต์ที่เหลือ ขั้นตอนการทำงานที่เหมาะสมคือเครื่องมือวินิจฉัยของเรา พร้อมกับการส่งผ่าน J2534 ไปยังซอฟต์แวร์ OEM ความซื่อสัตย์นี้ทำให้ยอดสั่งซื้อจากตัวแทนจำหน่ายเพิ่มขึ้น เพราะพวกเขาไม่ต้องได้รับโทรศัพท์แสดงความไม่พอใจเกี่ยวกับการอ้างว่า "เข้าถึงได้อย่างเต็มที่" ซึ่งใช้งานไม่ได้จริงในภาคสนามอีกต่อไป
• การรีเซ็ต TPMS และการตั้งโปรแกรมเซ็นเซอร์
• การวินิจฉัยระบบ ABS และ SRS ด้วยข้อมูลเซ็นเซอร์แบบเรียลไทม์
• การรีเซ็ตบริการ: อายุการใช้งานของน้ำมันเครื่อง การสึกหรอของผ้าเบรก การลงทะเบียนแบตเตอรี่
• การตั้งโปรแกรมกุญแจในกรณีที่ระบบรักษาความปลอดภัยของ OEM อนุญาต
5.3 การบูรณาการระบบคลาวด์
การวินิจฉัยระยะไกลผ่านการบันทึกข้อมูลบนคลาวด์ช่วยให้ช่างเทคนิคอาวุโสสามารถตรวจสอบข้อมูลแบบเรียลไทม์และประวัติข้อผิดพลาดได้จากทุกที่ การสร้างรายงานยานพาหนะในรูปแบบ PDF สำหรับเอกสารการบริการ ฐานข้อมูลการสนับสนุนทางเทคนิคออนไลน์ที่เชื่อมโยงกับรหัสประจำตัวยานพาหนะช่วยลดเวลาในการวินิจฉัยบนแพลตฟอร์มที่ไม่คุ้นเคย การผสานรวมแดชบอร์ดการจัดการยานพาหนะมีให้สำหรับผู้ประกอบการที่ใช้งานยานพาหนะมากกว่า 10 คัน
“68% ของการขอคืนสินค้า (RMA) ในช่วง 18 เดือนที่ผ่านมา ถูกแจ้งว่า ‘ใช้ไม่ได้กับรถปี 2024 ของฉัน’ ซึ่งไม่ใช่ความล้มเหลวของฮาร์ดแวร์ แต่เป็นเพราะข้อมูลในฐานข้อมูลหายไป หรือการเจรจาต่อรองรหัสความปลอดภัยล้มเหลวโดยไม่มีการแจ้งเตือน”
6. การออกแบบทางกลและอุตสาหกรรม
6.1 การออกแบบตู้ควบคุม
มาตรฐาน IP54 เป็นมาตรฐานพื้นฐาน และ IP65 สำหรับรุ่นพรีเมียม มีการหุ้มด้วยยางที่มุมทั้งสี่และด้านหลัง – ไม่ใช่แค่เพื่อความสวยงาม แต่เพื่อการใช้งาน การตกกระแทกจากธรณีประตูรถยนต์และขอบโต๊ะทำงานเป็นสาเหตุการเสียหายทางกายภาพที่พบบ่อยที่สุดในสินค้าที่ส่งคืน โครงสร้างกันกระแทกภายในช่วยแยกชุดประกอบ PCB ออกจากการกระแทกของตัวเครื่อง ตัวเรือนขั้วต่อ OBD ได้รับการเสริมความแข็งแรงแยกต่างหาก เนื่องจากความเครียดของขั้วต่อจากน้ำหนักของสายเคเบิลเป็นสาเหตุการเสียหายในระยะยาวที่จะปรากฏขึ้นหลังจากใช้งานมากกว่า 6,000 ครั้ง

6.2 การออกแบบส่วนติดต่อผู้ใช้
หน้าจอสัมผัสแบบ capacitive ขนาด 7 ถึง 10 นิ้ว ขึ้นอยู่กับรุ่น การปรับแต่งความไวในการสัมผัสที่ใช้งานได้สะดวกแม้สวมถุงมือ — นี่คือการตั้งค่าซอฟต์แวร์ที่ผู้ผลิตส่วนใหญ่ละเลย และเห็นผลได้ทันทีจากผลตอบรับในศูนย์บริการ ช่างซ่อมรถยนต์สวมถุงมือไนไตรล์อยู่ตลอดเวลา เครื่องสแกนที่ต้องใช้การป้อนข้อมูลด้วยนิ้วเปล่าจะถูกวางทิ้งภายในหนึ่งสัปดาห์ ปุ่มลัดทางกายภาพสำหรับฟังก์ชันที่ใช้บ่อยที่สุดสี่ฟังก์ชันช่วยลดการพึ่งพาหน้าจอสัมผัสสำหรับการใช้งานด้วยมือเดียว
6.3 การจัดการความร้อน
ตู้ปิดผนึกไม่สามารถใช้ระบบระบายความร้อนแบบแอคทีฟได้ การออกแบบระบายความร้อนอาศัยแผ่นระบายความร้อนอะลูมิเนียมภายในที่เชื่อมติดกับตัวประมวลผลและเชื่อมต่อกับแผงด้านหลังของตู้ ซึ่งทำหน้าที่เป็นตัวระบายความร้อนแบบพาสซีฟ เป้าหมายของการออกแบบคือความเสถียรในการทำงานอย่างต่อเนื่องตลอดกะทำงาน 8 ชั่วโมง เป้าหมายคือการรักษาประสิทธิภาพเต็มที่ที่อุณหภูมิแวดล้อม 55 องศาเซลเซียส ครอบคลุมการใช้งานใกล้กับห้องเครื่องยนต์
7. การปฏิบัติตามและการรับรอง
7.1 มาตรฐานยานยนต์
การปฏิบัติตามมาตรฐาน ISO 7637 ครอบคลุมการป้องกันกระแสไฟกระชากในสายจ่ายไฟและอินเทอร์เฟซ OBD แต่มาตรฐานนี้เป็นเพียงขั้นต่ำ ไม่ใช่ขั้นสูงสุด ความเสียหายของรถ Mercedes Sprinter เกิดจากกระแสไฟกระชากแบบ Pulse 3a และ 3b ที่ ISO 7637-2 กำหนดไว้ ซึ่งการออกแบบดั้งเดิมของเราประเมินค่าต่ำเกินไปในสภาพแวดล้อมจริงของรถยนต์ที่มี EMI สูง ISO 16750 ครอบคลุมภาระทางสิ่งแวดล้อมและไฟฟ้าสำหรับชิ้นส่วนยานยนต์ ข้อกำหนดการออกแบบภายในของเรานั้นสูงกว่ามาตรฐานเหล่านี้ โดยเฉพาะอย่างยิ่งในด้านระดับการป้องกัน TVS และการกรองโหมดร่วม
• ISO 7637 — ความทนทานต่อสัญญาณรบกวนชั่วขณะและสัญญาณพัลส์ การป้องกันสายส่งไฟฟ้า
• ISO 16750 — ข้อกำหนดด้านสิ่งแวดล้อมและไฟฟ้าสำหรับชิ้นส่วนยานยนต์
• SAE J2534-1 และ J2534-2 — การปฏิบัติตามข้อกำหนดแบบส่งผ่านสำหรับการบูรณาการซอฟต์แวร์ OEM
7.2 การรับรองระดับโลก
• เครื่องหมาย CE — ความเข้ากันได้ทางแม่เหล็กไฟฟ้าและความปลอดภัยทางไฟฟ้าสำหรับตลาดในยุโรป
• การอนุมัติจาก FCC — การดำเนินงานไร้สายในอเมริกาเหนือ
• การปฏิบัติตามข้อกำหนด RoHS — ข้อจำกัดเกี่ยวกับสารอันตรายสำหรับตลาดสหภาพยุโรปและเอเชีย
• การประเมินตามข้อกำหนด REACH — สำหรับสารเคมีเฉพาะชนิดที่กำหนด
การรับรองทั้งหมดดำเนินการภายใต้โปรแกรม ODM ลูกค้าจะได้รับผลิตภัณฑ์ที่ได้รับการรับรองอย่างสมบูรณ์พร้อมสำหรับการวางจำหน่ายในตลาด
8. การทดสอบและการตรวจสอบความถูกต้อง
8.1 การทดสอบการทำงาน
การตรวจสอบความถูกต้องของยานยนต์หลายยี่ห้อดำเนินการกับกลุ่มยานยนต์ 50 คันของเรา ซึ่งจะได้รับการอัปเดตทุกไตรมาสเพื่อรวมรุ่นปีใหม่ ๆ กลุ่มยานยนต์นี้ครอบคลุมแบรนด์จากสหรัฐอเมริกา ยุโรป และเอเชีย ตั้งแต่ปี 1996 จนถึงปัจจุบัน การทดสอบความเสถียรของการสื่อสาร ECU นั้นก้าวไปไกลกว่าการตรวจสอบการจับมือกันของโปรโตคอล — เราทดสอบภายใต้สัญญาณรบกวนทางไฟฟ้าที่เกิดขึ้นจริง ระหว่างการสตาร์ทเครื่องยนต์ และในขณะที่มีโหลดกระแสสูงอื่น ๆ ทำงานพร้อมกัน
การทดสอบวงจรการทำงานของยานยนต์โดยใช้เครื่องยนต์ดีเซลที่กำลังทำงานอยู่ ร่วมกับโหลดแบงค์ 30 กิโลวัตต์ และหัวฉีดเสียงรบกวนแบบช่องว่างประกายไฟ เป็นข้อบังคับก่อนการอนุมัติเทปออกในทุกรอบการผลิต ไม่มีมาตรฐาน ISO ใดกำหนดข้อบังคับนี้ แต่ข้อมูลจากภาคสนามของเราบ่งชี้ว่าควรเพิ่มข้อกำหนดนี้เข้าไป
8.2 การทดสอบด้านสิ่งแวดล้อม
• การทดสอบการตกจากความสูง 1.2 ถึง 1.5 เมตร ลงบนพื้นคอนกรีต ซึ่งเป็นความสูงที่สมจริง เช่น ขอบประตูหรือโต๊ะทำงาน
• การทดสอบการเปลี่ยนแปลงอุณหภูมิสูงและต่ำ: -10 ถึง 55 องศาเซลเซียส พร้อมการตรวจสอบการทำงานที่อุณหภูมิทั้งสองระดับ
• การทดสอบการสั่นสะเทือนบนแท่นหกแกนจำลองสภาพพื้นโรงงานและการขนส่งยานพาหนะ
• การตรวจสอบความสมบูรณ์ของสัญญาณ CAN bus หลังการสั่นสะเทือนโดยใช้ออสซิโลสโคป — การเกิดสัญญาณก้องหลังความเครียดทางกลเป็นโหมดความล้มเหลวที่การทดสอบการทำงานเพียงอย่างเดียวตรวจไม่พบ
8.3 การทดสอบการผลิต
การทดสอบวงจรภายในบนแผงวงจรทุกแผงจะตรวจสอบจำนวนชิ้นส่วนและการเชื่อมต่อบัดกรี การทดสอบวงจรการทำงานจะตรวจสอบโปรโตคอลการสื่อสาร เส้นทาง I/O ทุกเส้นทาง และการควบคุมแหล่งจ่ายไฟที่อุณหภูมิต่างๆ การปรับเทียบอินเทอร์เฟซ OBD กับตัวจำลอง ECU อ้างอิงจะยืนยันจังหวะเวลาของโปรโตคอลและระดับสัญญาณก่อนการประกอบขั้นสุดท้าย ไม่มีหน่วยใดจัดส่งหากไม่ผ่านทั้งสามขั้นตอน นี่เป็นส่วนหนึ่งที่ทำให้เรามีอัตราการส่งคืนสินค้าเนื่องจากความล้มเหลวในการสื่อสารเพียง 0.3 เปอร์เซ็นต์
9. การผลิตและการผลิตจำนวนมาก
9.1 การเพิ่มประสิทธิภาพ DFM
การออกแบบเพื่อการผลิตเริ่มต้นตั้งแต่การตรวจสอบแผนผังวงจร ไม่ใช่หลังจากการจัดวางเลย์เอาต์ สำหรับไอซีที่สำคัญทุกตัวในการออกแบบ ไม่ว่าจะเป็นทรานซีฟเวอร์ ไมโครคอนโทรลเลอร์ หรือระบบจัดการพลังงาน เราจะจัดทำเอกสารเกี่ยวกับชิ้นส่วนทดแทนที่มีคุณสมบัติเหมาะสมก่อนที่จะส่งไปผลิตจริง ปัญหาเรื่องความพร้อมของชิ้นส่วนทำให้โครงการ ODM สองโครงการต้องล้มเหลวในปี 2021 และ 2022 เนื่องจากไม่มีกลยุทธ์ในการหาชิ้นส่วนทดแทน การเลือกใช้ไอซีที่มีวงจรชีวิตยาวนานจะช่วยหลีกเลี่ยงสถานการณ์ที่ผลิตภัณฑ์เข้าสู่กระบวนการผลิตแล้วชิ้นส่วนหลักหมดอายุการใช้งานภายใน 18 เดือน
9.2 SMT และการประกอบ
สายการผลิต SMT อัตโนมัติสำหรับการประกอบชิ้นส่วนบนพื้นผิวทั้งหมด — ไม่มีการวางชิ้นส่วนด้วยมือบนแผงวงจรการผลิต การบัดกรีแบบคลื่นสำหรับขั้วต่อแบบทะลุรูเมื่อจำเป็น การแฟลชระบบขั้นสุดท้ายและการติดตั้งซอฟต์แวร์เป็นส่วนหนึ่งของกระบวนการผลิต ไม่ใช่ขั้นตอนหลังการประกอบ แต่ละหน่วยจะได้รับเฟิร์มแวร์การผลิต ฐานข้อมูลยานยนต์ และพารามิเตอร์การปรับเทียบในรูปแบบการทำงานที่ควบคุมและบันทึกไว้ ความสามารถในการอัปเดต OTA จะได้รับการตรวจสอบในทุกหน่วยก่อนออกจากสายการผลิต
9.3 การประกันคุณภาพ
ตรวจสอบการทำงาน 100 เปอร์เซ็นต์ในทุกหน่วย ไม่ใช่การสุ่มตัวอย่าง การทดสอบการใช้งานต่อเนื่อง (Burn-in testing) จะทำการทดสอบแต่ละหน่วยที่อุณหภูมิสูงเป็นระยะเวลาที่กำหนด เพื่อตรวจจับความล้มเหลวในช่วงเริ่มต้นก่อนการจัดส่ง การตรวจสอบความถูกต้องของการสื่อสารกับยานพาหนะขั้นสุดท้าย จะเชื่อมต่อแต่ละหน่วยเข้ากับโปรแกรมจำลอง ECU แบบเรียลไทม์ และตรวจสอบการอ่าน การล้างรหัสข้อผิดพลาด (DTC) และข้อมูลแบบเรียลไทม์ผ่านโปรโตคอลที่รองรับทั้งหมด
การผลิตจำนวน 120,000 ชิ้นของเราตลอดระยะเวลา 18 เดือน และสายการผลิตแบบ ODM สามสาย สามารถรักษาอัตราการส่งคืนสินค้าที่ล้มเหลวในการสื่อสารไว้ที่ 0.3 เปอร์เซ็นต์ ตัวเลขดังกล่าวเป็นผลลัพธ์ของกระบวนการนี้
10. ผลลัพธ์ของโครงการ
10.1 ความสำเร็จทางเทคนิค
การสื่อสารกับ ECU ที่เสถียรในรถยนต์รุ่นที่ทดสอบมากกว่า 95 เปอร์เซ็นต์ บนระบบวินิจฉัยขั้นสูง ไม่ใช่แค่ OBD-II ทั่วไป เวลาบูตเครื่องต่ำกว่า 10 วินาที ตั้งแต่สตาร์ทเครื่องเย็นจนพร้อมสำหรับการวินิจฉัย การอ่านข้อมูล CAN ความเร็วสูงที่เชื่อถือได้ที่ 500 kbps และ 1 Mbps โดยไม่มีเฟรมตกหล่น ภายใต้ข้อกำหนดด้านภูมิคุ้มกันสัญญาณรบกวน ISO 11898
อัตราความล้มเหลวในการสื่อสารในสินค้าที่ส่งคืนจากลูกค้าลดลงจาก 4.2 เปอร์เซ็นต์เหลือ 0.3 เปอร์เซ็นต์ หลังจากมีการเปลี่ยนแปลงรูปแบบแผงวงจรพิมพ์ (PCB) การอัปเกรดระบบป้องกันไฟกระชาก และการปรับปรุงเฟิร์มแวร์ที่นำมาใช้หลังเหตุการณ์สินค้า Sprinter รุ่นปี 2023 ล้มเหลว จากจำนวนสินค้า 120,000 ชิ้น นั่นหมายความว่าจำนวนสินค้าที่ส่งคืนภายใต้การรับประกันลดลงจาก 5,040 ชิ้นเหลือ 360 ชิ้น
10.2 ผลประกอบการตลาด
เครื่องสแกนดังกล่าวเปิดตัวในอเมริกาเหนือและยุโรป โดยวางตำแหน่งเป็นเครื่องมือวินิจฉัยระดับมืออาชีพกลางถึงสูง อัตราการสั่งซื้อซ้ำจากผู้จัดจำหน่ายดีขึ้นหลังจากที่ลูกค้าใช้การสื่อสารเรื่องความคุ้มครองที่โปร่งใส โดยการเผยแพร่เมทริกซ์ความคุ้มครองที่ปรับปรุงโดยผู้ผลิตแทนที่จะเป็นการอ้างอิงเปอร์เซ็นต์ทั่วไป ความสามารถในการขยายขีดความสามารถสำหรับการวินิจฉัยรถยนต์ไฟฟ้าถูกสร้างขึ้นในสถาปัตยกรรมฮาร์ดแวร์ โดยมีตำแหน่ง CAN FD และ DoIP บนแผงวงจรพิมพ์สำหรับผลิตภัณฑ์รุ่นต่อไป
11. รถยนต์ไฟฟ้าและศักยภาพในการขยายตัวในอนาคต
11.1 การวินิจฉัยยานยนต์ไฟฟ้า
วลี “พร้อมใช้งานสำหรับรถยนต์ไฟฟ้า” เป็นวลีที่ถูกใช้มากเกินไปในวงการวินิจฉัยปัญหาของรถยนต์ในปัจจุบัน ดังนั้นแล้ว มันต้องการอะไรบ้างในด้านฮาร์ดแวร์กันแน่?
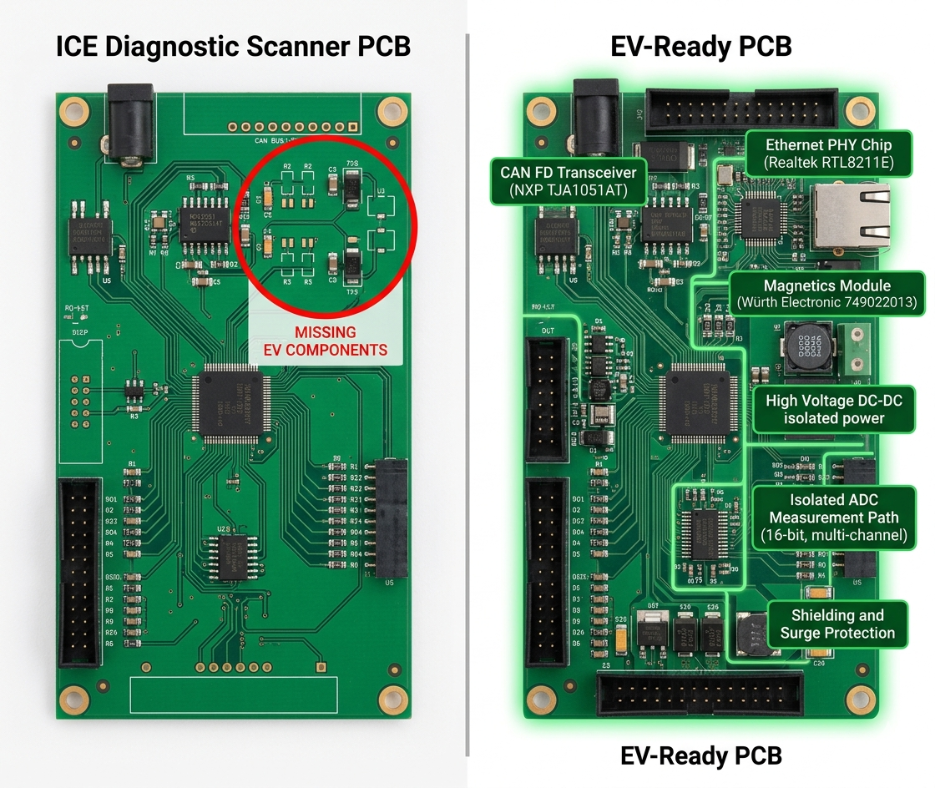
การตรวจสอบ BMS บนชุดแบตเตอรี่ที่มีแรงดัน 400 ถึง 800 โวลต์ จำเป็นต้องใช้ ADC ความละเอียดสูงเพิ่มเติมและเส้นทางการวัดแบบแยกส่วน ซึ่งสแกนเนอร์ ICE มาตรฐานไม่มี การวินิจฉัยระบบแรงดันสูง — ความผิดพลาดในการแยกแรงดันสูง การตรวจจับการเชื่อมของคอนแทคเตอร์ สัญญาณความร้อนสูงเกิน — ใช้ PID ที่แตกต่างกัน รูปแบบการเข้าถึงความปลอดภัยที่แตกต่างกัน และโหมดความล้มเหลวที่แตกต่างจากสิ่งใดๆ ในคู่มือการวินิจฉัย ICE ECU ของรถยนต์ไฟฟ้าใช้คำสั่ง UDS เดียวกันกับ ICE แต่มีโครงสร้าง PID ที่แตกต่างกันอย่างสิ้นเชิง หากไม่มีฮาร์ดแวร์ระดับกายภาพที่ตรงกัน สแกนเนอร์จะไม่สามารถสร้างการเชื่อมต่อบนแพลตฟอร์มต่างๆ ได้ นี่ไม่ใช่ปัญหาของฐานข้อมูล แต่เป็นปัญหาของฮาร์ดแวร์
• การตรวจสอบแรงดันไฟฟ้า อุณหภูมิ และความสมดุลของเซลล์ในระบบ BMS
• การตรวจจับความผิดพลาดในการแยกแรงดันสูงและการวิเคราะห์สถานะของคอนแทคเตอร์
• การวินิจฉัยระบบการชาร์จ รวมถึงโปรโตคอลการสื่อสารของ EVSE
• การตรวจสอบสัญญาณเตือนล่วงหน้าของการเกิดภาวะความร้อนสูงเกินควบคุม
11.2 การขยาย DoIP และ OTA
การรองรับ DoIP อย่างเต็มรูปแบบตามมาตรฐาน ISO 13400 นั้น จำเป็นต้องใช้ Ethernet PHY, วงจรแม่เหล็ก และ TCP/IP stack บน MCU ซึ่งจะเพิ่มต้นทุน BOM อีก 8 ถึง 12 ดอลลาร์ ก่อนที่จะรวมค่าใช้จ่ายในการพัฒนาเฟิร์มแวร์ การรองรับ CAN FD สำหรับการสื่อสารข้อมูลความเร็ว 5 Mbps จะเพิ่มอีก 2 ถึง 3 ดอลลาร์ต่อหน่วย ต้นทุน BOM โดยรวมที่เพิ่มขึ้นจากเครื่องสแกน ICE ที่ใช้งานได้ดี ไปสู่ฮาร์ดแวร์ที่พร้อมใช้งานสำหรับรถยนต์ไฟฟ้าอย่างแท้จริง จะอยู่ที่ 25 ถึง 40 เปอร์เซ็นต์ หรือคิดเป็น 15 ถึง 25 ดอลลาร์ต่ออุปกรณ์
เมื่อลูกค้าขอให้ "เพิ่มระบบวินิจฉัยรถยนต์ไฟฟ้า" การสนทนาจะเป็นไปอย่างตรงไปตรงมา: นี่ไม่ใช่แค่การติ๊กในช่องซอฟต์แวร์ แต่เป็นการทำงานฐานข้อมูลเฉพาะสำหรับรถยนต์แต่ละรุ่นเป็นเวลาหกเดือน นอกเหนือจากการเปลี่ยนแปลงฮาร์ดแวร์ที่ทำให้ต้นทุนต่อหน่วยเพิ่มขึ้น 15 ถึง 25 ดอลลาร์ หากคุณกำลังจัดซื้อเครื่องสแกนที่รองรับรถยนต์ไฟฟ้า โปรดขอรายการตรวจสอบฮาร์ดแวร์ DoIP และ CAN FD และรายงานการตรวจสอบที่ลงนามแล้วสำหรับแพลตฟอร์มรถยนต์ไฟฟ้าอย่างน้อยสามแพลตฟอร์มก่อนที่จะลงนามในใบสั่งซื้อ
“ขอเอกสารตรวจสอบฮาร์ดแวร์ DoIP และ CAN FD พร้อมรายงานการตรวจสอบที่ลงนามแล้วสำหรับแพลตฟอร์มรถยนต์ไฟฟ้าอย่างน้อยสามแพลตฟอร์ม นี่ไม่ใช่คำกล่าวอ้างทางการตลาด แต่เป็นเอกสารที่ลงนามแล้ว”
12. เหตุใดจึงควรเลือกเราสำหรับการพัฒนาอุปกรณ์วินิจฉัยยานยนต์
เราไม่ได้เน้นที่รายการคุณสมบัติที่ยาวที่สุด แต่เราเน้นที่ข้อมูลเป็นหลัก
ความสามารถในการออกแบบ PCB ของเราก้าวข้ามการจัดวาง EMC มาตรฐานไปสู่การออกแบบที่คำนึงถึงความทนทานต่อสัญญาณรบกวนชั่วขณะเฉพาะสำหรับยานยนต์แต่ละรุ่น ซึ่งได้รับการตรวจสอบแล้วบนยานยนต์ที่ใช้งานจริงโดยใช้โหลดแบงค์และอุปกรณ์สร้างสัญญาณรบกวน ไม่ใช่แค่การจำลองเท่านั้น ความล้มเหลวของ Mercedes Sprinter ในปี 2023 ได้สร้างชุดกฎการออกแบบที่ไม่มีมาตรฐาน ISO ใดกำหนดไว้ และช่วยลดอัตราการส่งคืนสินค้าที่ล้มเหลวของระบบสื่อสารจาก 4.2 เปอร์เซ็นต์เหลือ 0.3 เปอร์เซ็นต์ ความรู้ดังกล่าวถูกนำไปใช้ในการออกแบบทุกชิ้นที่เราผลิตในปัจจุบัน
วิศวกรรมฮาร์ดแวร์ระดับยานยนต์หมายถึงส่วนประกอบ AEC-Q100, การปฏิบัติตามมาตรฐาน ISO 7637 และ 16750 เป็นจุดเริ่มต้น และกลยุทธ์การใช้ส่วนประกอบทดแทนที่บันทึกไว้ก่อนการออกแบบขั้นสุดท้าย ช่องว่างระหว่างสแกนเนอร์ที่ผ่านการรับรองและสแกนเนอร์ที่สามารถใช้งานได้จริง 200,000 รอบการเชื่อมต่อในโรงงานซ่อมจริงนั้นไม่ปรากฏให้เห็นในเอกสารข้อมูลจำเพาะ
การพัฒนาซอฟต์แวร์ฝังตัวครอบคลุมทุกส่วนงาน ตั้งแต่เฟิร์มแวร์โปรโตคอล การจัดการฐานข้อมูล ECU โครงสร้างพื้นฐานการอัปเดต OTA และการบูรณาการระบบคลาวด์ เราถือว่าจังหวะการอัปเดตฐานข้อมูลเป็นผลลัพธ์ที่มีข้อตกลงระดับบริการ (SLA) คือไม่เกิน 45 วัน นับจากการเปิดตัวรุ่นปีใหม่จนถึงการอัปเดตฐานข้อมูลที่ได้รับการตรวจสอบแล้ว
บริการ OEM และ ODM แบบครบวงจร หมายความว่าลูกค้าจะได้รับผลิตภัณฑ์สำเร็จรูปที่ได้รับการรับรองและพร้อมจำหน่ายในตลาด การรับรองมาตรฐาน CE, FCC และ RoHS จะได้รับการจัดการภายในโปรแกรม การผลิตจำนวนมากผ่านการตรวจสอบการทำงาน 100 เปอร์เซ็นต์ การตรวจสอบความถูกต้องของการสื่อสารกับยานยนต์อย่างเต็มรูปแบบในทุกหน่วยก่อนการจัดส่ง
และเราบอกลูกค้าว่าเครื่องมือของเราทำอะไรไม่ได้บ้าง เช่น ข้อจำกัดในการบายพาสเกตเวย์รักษาความปลอดภัยบนแพลตฟอร์มบางรุ่นตั้งแต่ปี 2024 ขึ้นไป ขั้นตอนการทำงานแบบไฮบริดที่จำเป็นสำหรับการตั้งโปรแกรม ECU ในรถยนต์เหล่านั้น ต้นทุนที่แท้จริงของการเตรียมความพร้อมสำหรับรถยนต์ไฟฟ้าในด้านฮาร์ดแวร์ ความโปร่งใสนี้ไม่ใช่จุดอ่อนในกระบวนการขาย ข้อมูลการสั่งซื้อซ้ำของเราบอกว่ามันตรงกันข้ามเสียด้วยซ้ำ
| 50 +กลุ่มยานพาหนะสำหรับการตรวจสอบความถูกต้อง | 45 วันข้อตกลงระดับบริการ (SLA) สำหรับการอัปเดตโมเดลปีสูงสุด | 0.3% อัตราความล้มเหลวของการสื่อสารภาคสนาม | 100% การตรวจสอบการทำงานต่อหน่วย |
ตัวเลขทั้งหมดได้มาจากบันทึกการผลิตภายใน บันทึกการส่งคืนสินค้า และข้อมูลการตรวจสอบภาคสนามจากสินค้าที่จัดส่งไปแล้วกว่า 200,000 ชิ้น ข้อมูลลูกค้าและแบรนด์จะถูกปกปิดเป็นความลับตามข้อตกลงกับผู้ผลิต (ODM)