Rychlost bezkartáčového stejnosměrného motoru můžete ovládat pomocí regulátoru BLDC motoru a PID algoritmu. Toto nastavení vám pomůže okamžitě změnit výstup regulátoru. Udrží váš bezkartáčový stejnosměrný motor na požadované rychlosti, i když se okolní podmínky mění. Aby to fungovalo, potřebujete hardware i software.
Níže uvedená tabulka ukazuje, jak použití PID regulace otáček v regulátorech motorů BLDC zlepšuje jejich fungování:
Výkonnostní aspekt | Popis |
|---|---|
Regulace rychlosti | Udržuje stabilní rychlost, i když ji něco naruší. |
Čas vzestupu | Umožňuje motoru rychleji dosáhnout správné rychlosti. |
Překročení | Zabraňuje motoru v příliš rychlém překročení nastavené rychlosti. |
Chyba v ustáleném stavu | Poskytuje správnou rychlost po dlouhou dobu. |
Key Takeaways
PID algoritmus pomáhá regulátoru motoru BLDC udržovat stabilní rychlost, i když se věci mění. Dobrý hardware, senzory a firmware spolupracují na správné regulaci rychlosti. Pokud pečlivě vyladíte nastavení PID, motor může rychle dosáhnout správné rychlosti. Nebude se pohybovat příliš vysoko ani se chvět. Testování regulátoru s různým zatížením a rychlostmi vám pomůže včas odhalit problémy. To také zlepšuje výkon motoru. Výběr správného motoru, regulátoru a metody zpětné vazby šetří energii. Také zajišťuje dobrý výkon a delší životnost systému.
BLDC regulátory motorů a základy PID regulace

Struktura motoru
Bezkartáčový stejnosměrný motor má jednoduchou konstrukci. Rotor má permanentní magnety. Stator drží vinutí. Tato konstrukce nepotřebuje kartáče. U jiných motorů se kartáče opotřebovávají. Řídicí jednotka bezkartáčového stejnosměrného motoru se připojuje ke statoru. Řídí tok proudu. Níže uvedená tabulka ukazuje klíčové části motoru:
Parametr / Rovnice | Popis |
|---|---|
Průměr statoru (Ds) | Hlavní velikost statoru |
Průřez drážky (S_enc) | Plocha pro vinutí, založená na velikosti statoru a počtu drážek |
Faktor vyplnění štěrbiny (k_r) | Jaká část štěrbiny je vyplněna vodičem |
Počet slotů (N_e) | Celkový počet drážek ve statoru |
Zpětná elektromotorická síla (E) | Napětí vytvořené pohybem rotoru |
Účinnost motoru (η) | Poměr výstupního a vstupního výkonu |
Řídicí jednotka motoru BLDC využívá tyto funkce k lepšímu provozu motoru. Také pomáhá prodlužovat jeho životnost.
Elektronická komutace
Motory BLDC nepotřebují kartáče. Řídicí jednotka místo toho používá elektronickou komutaci. Spíná proud ve vinutí statoru pomocí tranzistorů. Řídicí jednotka kontroluje polohu rotoru pomocí senzorů. Mohou to být Hallovy senzory nebo rotační enkodéry. Některé regulátory senzory nepoužívají. Měří zpětnou elektromotorickou sílu, aby zjistily polohu rotoru. To umožňuje velmi dobře řídit rychlost a směr.
Testy ukazují, že elektronická komutace poskytuje velmi dobrou regulaci otáček. Modely používající tuto metodu téměř přesně odpovídají skutečným otáčkám motoru. To platí i při rozběhu, zastavování nebo v hlučných prostředích. To ukazuje, že regulátory motorů BLDC zvládají náročné úkoly regulace.
Regulace rychlosti PID
Pro udržení stabilních otáček motoru se používá algoritmus pid. Regulátor kontroluje otáčky a porovnává je s cílovými hodnotami. Změní výstup, aby opravil případné rozdíly. Toto řízení s uzavřenou smyčkou udržuje motor na správných otáčkách. Funguje i při změně zátěže. Studie ukazují, že pokročilé regulátory zkracují dobu náběhu o 28 %. Dobu ustálení zkracují o 35 %. Překmit je o 22 % nižší. Chyba v ustáleném stavu může být až 0.3 %. To znamená, že váš regulátor motoru BLDC poskytuje rychlou a stabilní regulaci otáček pro mnoho použití.
Komponenty pro regulaci otáček
Typy motorů
Můžete si vybrat z různých bezkartáčových stejnosměrných motorů. Každý z nich má speciální vlastnosti. Tyto vlastnosti mění způsob fungování regulátoru motoru BLDC. Většina motorů BLDC používá tři fáze. Vinutí může být ve tvaru hvězdy nebo trojúhelníku. Motory zapojené do hvězdy, jako jsou motory Oriental Motor, jsou velmi účinné. Také dobře regulují otáčky. Tyto motory mohou poskytovat točivý moment až 5159 lb-in. Jejich výkon se pohybuje od 15 W do 400 W. Výběr správného motoru pomáhá regulátoru udržovat stabilní otáčky. Také šetří energii.
Hardware ovladače
Hardware regulátoru motoru BLDC je hlavní součástí vašeho systému. K nastavení rychlosti se používá pulzně šířková modulace neboli PWM. Regulátor mění délku trvání napěťových pulzů. Hallovy senzory uvnitř statoru ukazují, kde se rotor nachází. To pomáhá regulátoru přepínat fáze ve správný čas. S tímto nastavením nepotřebujete výkonová relé. To znamená méně práce pro udržení chodu. Hardware umožňuje připojení k programovatelným regulátorům. Tato konstrukce činí systém efektivním a spolehlivým. Například motor a regulátor řady BMU 200 W dosahují účinnosti 86 %. Splňují také normy IE4.
Snímače zpětné vazby rychlosti
Pro udržení správné rychlosti motoru potřebujete dobrou zpětnou vazbu. Mnoho systémů používá Hallovy senzory nebo rotační enkodéry. Tyto senzory sledují polohu rotoru. Pomáhají regulátoru rychle měnit rychlost. Některé systémy používají bezsenzorové řízení. Odhadují polohu rotoru kontrolou zpětné elektromotorické síly nebo pomocí pozorovatelů. Výzkum ukazuje, že bezsenzorové metody fungují dobře, i když se zátěž rychle mění. Pozorovatelé, jako je Extended State Observer, pomáhají blokovat problémy. Také zpřesňují odhady rychlosti. Díky tomu váš regulátor otáček v mnoha situacích funguje lépe.
Bezsenzorová detekce funguje při vysokých i nízkých rychlostech.
Pokročilé pozorovatele snižují fázové zpoždění a překmit.
Dobrá zpětná vazba pomáhá systému zvládat všechny druhy zátěže.
Potřeby firmwaru
Firmware musíte naprogramovat ve svém regulátoru. Ten se stará o všechny řídicí úlohy. Firmware čte zpětnou vazbu ze senzorů nebo bezsenzorových odhadů. Spouští... PID algoritmus aby se udržela stabilní rychlost. Digitální signálové procesory neboli DSP pomáhají řídicí jednotce rychle kontrolovat věci. Také provádějí rychlé výpočty. To umožňuje řídicí jednotce rychle reagovat na změny. Firmware také řídí PWM signály. V případě potřeby mění pracovní cyklus. Dobrý firmware pomáhá řídicí jednotce a motoru dobře spolupracovat. Udržuje rychlost na požadované úrovni.
Tip: Vždy otestujte firmware s různým zatížením a rychlostí. To vám pomůže odhalit problémy a vylepšit regulátor otáček.
Komponenta/Metoda | Popis a role v regulaci rychlosti | Doplňující podrobnosti a výhody |
|---|---|---|
Snímače polohy rotoru (Hallovy snímače, enkodéry) | Tyto senzory ukazují polohu rotoru pro fázovou komutaci. Mohou být dražší, zabírat místo a jejich montáž může být obtížná. | Jejich použití může snížit spolehlivost systému a zvětšit jeho velikost. Také zvyšují cenu. |
Bezsenzorové řídicí techniky | Tyto systémy využívají zpětnou elektromotorickou sílu a pozorovatele k odhadu polohy a otáček rotoru. Nejsou potřeba žádné fyzické senzory. | Snižují náklady a velikost. Také zvyšují spolehlivost systému. Fungují dobře, pokud se zátěž příliš nemění. |
Snímání zpětného elektromagnetického pole | Toto kontroluje zpětnou elektromotorickou sílu fáze, která není pod napětím. Pomáhá to najít komutační řád. Je to levné, ale nefunguje to dobře při nízkých rychlostech. | Potřebujete rozběh s otevřenou smyčkou. Nízké otáčky jsou obtížné, protože neexistuje zpětná elektromotorická síla. |
Integrace třetí harmonické napětí | Toto využívá třetí harmonickou zpětné elektromotorické síly k odhadu polohy magnetického toku rotoru. Není tolik ovlivněno zpožděním filtrování a funguje při mnoha rychlostech. | Poskytuje vysoký výkon a pomáhá motoru dobře startovat při nízkých otáčkách. |
Digitální signálové procesory (DSP) | DSP používají pokročilé řídicí algoritmy pro bezsenzorové řízení. Dokážou věci velmi rychle kontrolovat a vypočítávat. | Díky nim systém funguje lépe než běžné pohony založené na senzorech. Dokážou eliminovat potřebu senzorů pomocí matematických výpočtů. |
Pozorovatel v posuvném režimu (SMO) | SMO odhaduje polohu a rychlost rotoru. Řeší problémy způsobené nelinearitami a změnami parametrů. Pomáhá při nízkých rychlostech. | Dokáže sám odhadnout odpor a rychlost statoru. Udržuje systém stabilní a zajišťuje správnost odhadů. |
Pozorovatelé (metody založené na modelu) | Pozorovatelé odhadují věci, které nelze měřit, jako je poloha a rychlost rotoru. Používají systémové vstupy a výstupy. To napomáhá řízení v uzavřené smyčce. | Umožňují odhadovat těžko měřitelné věci. Díky nim je řízení přesnější a spolehlivější. Jsou potřebné pro bezsenzorové řízení. |
Odhad odporu statoru | To je důležité pro dobrou práci při nízkých otáčkách. Ovlivňuje to, jak dobře dokážete odhadnout statorový tok a otáčky. | Algoritmy využívající SMO a teorii hyperstability zvyšují odolnost systému vůči změnám parametrů. |
Implementace PID v regulátoru BLDC motoru
Hardware Setup
Nejprve si připravte hardware pro regulátor motoru BLDC. Vyberte si dobrý bezkartáčový stejnosměrný motor a regulátor, který používá pulzně šířkovou modulaci. K řízení BLDC použijte 8bitový mikrokontrolér, například PIC MCU. Připojte regulátor k vinutí motoru. Ujistěte se, že napájení odpovídá potřebám vašeho motoru. Pro zpětnou vazbu k motoru připojte senzory, jako jsou Hallovy senzory nebo enkodéry.
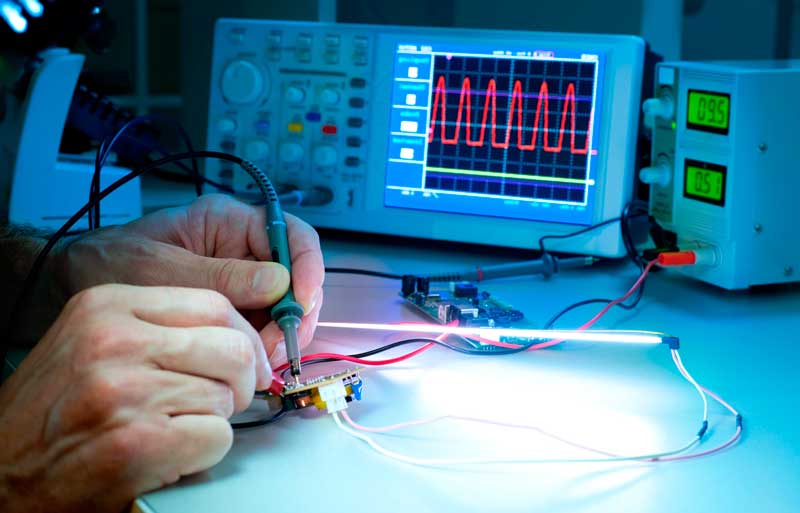
Připojte výstup regulátoru k fázím motoru. Pro spínání napájení použijte tranzistory nebo MOSFETy. Nastavte PWM signály pro řízení napětí odesílaného do motoru. Změňte pracovní cykly PWM pro nastavení rychlosti. Použijte osciloskop nebo datový záznamník ke kontrole vstupních, výstupních a chybových signálů. To vám pomůže zjistit, zda váš hardware funguje správně.
Tip: Vyzkoušejte hardware s různým zatížením. K nalezení nejlepšího nastavení použijte metody návrhu experimentů, jako je faktoriální návrh. Statistické nástroje, jako je ANOVA, vám pomohou zjistit, které faktory jsou pro výkon vašeho regulátoru nejdůležitější.
Integrace senzoru
Snímače jsou důležité v regulátoru motoru BLDC. Hallovy snímače a enkodéry vám sdělují polohu a rychlost rotoru. Můžete také použít bezsnímačové způsoby, které odhadují polohu ze zpětné elektromotorické síly. Připojte snímače ke vstupním pinům regulátoru. Ujistěte se, že jsou vodiče pevně připojeny a snímače správně nastaveny.
Fungování senzorů si můžete ověřit pomocí těchto věcí:
metrický | Popis |
|---|---|
Průměrná rychlost (V) | Zobrazuje průměrnou rychlost vašeho motoru. |
Průměrné zrychlení (A) | Ukazuje, jak rychle se mění rychlost. |
Průměrná odchylka trajektorie (D) | Měří, jak blízko je rychlost vašeho motoru v cílové poloze. |
Shoda trajektorií (C) | Ukazuje, jak moc se shodují skutečná a cílová rychlost. |
Protínající se oblast trajektorie (S) | Kontroluje, jak dobře si motor v průběhu času udržuje nastavenou rychlost. |
Pokud používáte modely strojového učení, můžete z těchto charakteristik odhadnout skóre motorických funkcí. To vám pomůže získat dobrou a stabilní zpětnou vazbu o rychlosti.
Poznámka: Vždy zkontrolujte signály senzorů, zda neobsahují šum. Vadné vodiče nebo nesprávně nastavené senzory mohou způsobit chyby v regulátoru otáček.
Algoritmus PID
Algoritmus PID pomáhá vašemu regulátoru motoru BLDC udržovat stabilní rychlost. Regulátor čte skutečnou rychlost ze senzorů a porovnává ji s vaší požadovanou hodnotou. Nachází chybu a používá tři části: proporcionální, integrační a derivační. Proporcionální část reaguje na aktuální chybu. Integrační část sčítá minulé chyby. Derivační část odhaduje budoucí chyby.
Algoritmus pid můžete ve firmwaru vašeho regulátoru napsat takto:
error = setpoint - actual_speed;
integral += error;
output = Kp * error + Ki * integral + Kd * (error - last_error);
last_error = error;
Mnoho regulátorů motorů BLDC používá pouze proporcionální a integrační část. Derivační část může způsobit chvění systému, zejména pokud je přítomen šum. Pro dosažení nejlepších výsledků můžete změnit hodnoty Kp a Ki. Začněte s malými čísly a zvyšujte je, přičemž sledujte případné překmity nebo nestabilitu.
Jak dobře váš pid funguje, si můžete ověřit pomocí těchto věcí:
Nárůst času
Čas usazování
Překročení
Chyba v ustáleném stavu
Můžete také použít pravidla založená na chybách, jako je integrální časově-čtvercová chyba (ITSE) nebo integrální absolutní chyba (IAE), abyste zjistili, jak dobře to funguje. Někteří inženýři používají speciální algoritmy, jako je genetický algoritmus nebo optimalizace roje částic, k vyladění nastavení pid pro dosažení lepších výsledků.
Tip: Pokud má váš regulátor příliš velké překmity nebo chvění, zkuste snížit Kp nebo vypnout derivační část.
Parametry ladění
Ladění regulátoru motoru BLDC je důležité pro dobrou regulaci otáček. Začněte výběrem prvních hodnot pro Kp a Ki. Můžete například zkusit Kp=5 a Ki=7. Spusťte motor a sledujte, jak rychle dosáhne nastavené rychlosti. Pokud je pomalý, zvyšte Kp. Pokud vidíte chvění, snižte Kp nebo Ki.
K kontrole výsledků můžete použít data z enkodérů nebo otáčkoměrů. Vyzkoušejte různé hodnoty a zapište si, co se stane. K porovnání nastavení použijte výkonnostní skóre, jako jsou IAE, ITAE, ITSE a ISE. Tato skóre vám pomohou najít nejlepší ladění pro váš regulátor otáček.
K modelování bezkartáčového stejnosměrného motoru můžete také použít matematické rovnice pro točivý moment, úhlovou rychlost a proud. To vám umožní testovat změny v ladění a zjistit, jak ovlivňují regulaci otáček.
Tip: Vždy otestujte ladění se skutečným hardwarem. Simulace pomáhají, ale skutečné testy odhalí problémy, které byste mohli přehlédnout.
Testování a odstraňování problémů
Testování regulátoru motoru BLDC vám pomůže najít a opravit problémy. Používejte senzory a záznamníky dat k zaznamenávání vstupních, výstupních a chybových signálů. Sledujte problémy, jako je saturace aktuátoru, integrační napětí nebo citlivost na šum.
Zde je tabulka běžných problémů a co je třeba zkontrolovat:
Kategorie | Popis / účel |
|---|---|
Chybové signály | Hledejte velké nebo rostoucí odchylky mezi požadovanou hodnotou a skutečnou rychlostí. |
Sytost aktuátoru | Zkontrolujte, zda výstup regulátoru dosáhl maxima nebo minima. |
Integrální navíjení | Dávejte pozor na pomalou odezvu nebo překmit způsobený příliš velkou integrační akcí. |
Citlivost na hluk | Zkontrolujte, zda vysokofrekvenční šum nezpůsobuje nestabilitu regulátoru. |
Předsudek | Hledejte chyby v ustáleném stavu, které nezmizí. |
Nelinearita | Všimněte si, zda se systém chová odlišně při různých rychlostech nebo zatíženích. |
Kalibrace senzoru | Ujistěte se, že senzory ukazují přesné hodnoty. |
Stav aktuátoru | Ověřte, zda motor reaguje na povely řídicí jednotky. |
Integrita zpětnovazební smyčky | Zajistěte, aby signály zpětné vazby odpovídaly skutečnému stavu systému. |
Ladění parametrů PID | Zkontrolujte si hodnoty Kp, Ki a Kd z hlediska stability a výkonu. |
Pokud se setkáte s problémy, změňte ladění nebo zkontrolujte hardware. Ujistěte se, že máte správné PWM signály a pracovní cyklus. Otestujte regulátor s různým zatížením a rychlostmi, abyste se ujistili, že funguje ve všech situacích.
Tip: Před testy hardwaru použijte simulace v uzavřené smyčce. To vám pomůže včas odhalit problémy a ušetří čas.
Tipy a výzvy pro regulátor otáček
Proud a napětí
Musíte zkontrolovat proud a napětí v regulátoru motoru BLDC. Použití nesprávného napětí může váš motor BLDC zastavit nebo poškodit. Níže uvedená tabulka ukazuje bezpečné napětí a teplotu pro váš regulátor:
Vstupní napětí (VDC) | Provozní výsledek |
|---|---|
8 - 30 | Normální operace |
> = 42 | Chyba úniku energie; motor se zastaví a volnoběžně se otáčí, dokud se nezapne a neobnoví napájení. |
Teplota (° C) | Chování proudového limitu |
|---|---|
<75 | Normální operace |
75 - 90 | Proudové limity se snižují na 40 A při 90 °C |
90 - 100 | Proudový limit je omezen na 40 A |
> = 100 | Motor se zastaví; volnoběh do resetu |
Měli byste také nastavit limity přepěťového proudu. Pokud je limit přepěťového proudu vyšší než obvykle, váš regulátor povolí krátké vysoké proudové impulzy. To pomůže vašemu BLDC zvládat rychlé změny zátěže.

Spínací frekvence
Spínací frekvence mění způsob fungování regulátoru motoru BLDC. Zvýšení spínací frekvence zvyšuje plynulost proudu. To pomáhá vašemu BLDC běžet tiše a poskytuje lepší točivý moment. Testy ukazují, že vyšší spínací frekvence zvětšují šířku pásma řízení. Například přepínání 8 kHz může zvýšit šířku pásma ze 400 Hz na 1 kHz. Získáte rychlejší odezvu a lepší regulaci otáček. Pokud je však frekvence příliš vysoká, regulátor se může více zahřát.
Detekce polohy
Dobrá detekce polohy je pro váš regulátor motoru BLDC důležitá. Můžete použít plný krok, poloviční krok nebo mikrokrokování. Mikrokrokování poskytuje nejlepší přesnost, ale menší točivý moment. Ovladače měničů s přerušovačem vám pomohou lépe řídit proud. Díky tomu váš BLDC běží plynulejším způsobem a usnadňuje řízení polohy. Pokud používáte ovladače omezující proud, můžete ztratit část přesnosti a účinnosti.
režim | Přesnost | točivý moment |
|---|---|---|
Úplný krok | Nízké | Vysoký |
Půl kroku | Střední | Střední |
Mikrokrokování | Vysoký | Nízké |
Problémy s firmwarem
Problémy s firmwarem mohou způsobit selhání vašeho regulátoru motoru BLDC. Ke kontrole signálů byste měli používat nástroje, jako jsou osciloskopy. Prohlédněte si paměť a registry, abyste našli chyby. Analýza trasování v reálném čase vám pomůže odhalit problémy s časováním. Automatizované testování odhalí chyby včas. Některé společnosti měly kvůli špatnému firmwaru velké problémy. Například přetečení zásobníku a chybějící bezpečnostní prvky jim způsobily ztrátu kontroly. Vždy testujte firmware a používejte pravidla bezpečného kódování.
Společné úskalí
Při ladění regulátoru otáček BLDC se můžete setkat s běžnými problémy. Mnoho lidí používá metodu pokus-omyl k nastavení. Hodnoty PIDTo může vést ke špatné regulaci. Pevná nastavení PID nefungují dobře, pokud se váš systém změní. Heuristické metody jako Ziegler-Nichols jsou snadné, ale ne vždy účinné. Adaptivní PID vyžaduje dobré modely, které je těžké získat. Pro sledování výkonu byste měli používat analýzu měřicích systémů a regulační diagramy. Vždy shromažďujte data, kontrolujte proces a neustále se učte.
Chcete-li nastavit regulaci otáček PID v regulátoru motoru BLDC, postupujte takto:
Vyberte správný hardware ovladače.
Připojte senzory pro zpětnou vazbu.
Naprogramujte regulátor s PID algoritmem.
Pro dosažení nejlepších výsledků nalaďte ovladač.
Otestujte regulátor s vaším BLDC motorem.
Neustále se učte a požádejte o pomoc, pokud se váš ovladač potýká se složitými problémy. Můžete dosáhnout stabilní rychlosti a spolehlivého ovládání.
Nejčastější dotazy
Co znamená zkratka PID v regulátorech motorů?
PID je zkratka pro proporcionální, integrační a derivační regulátor. Tyto tři části vám pomáhají řídit rychlost vašeho BLDC motoru. Každá část opravuje různé typy chyb ve vašem systému regulace otáček.
Proč můj BLDC motor překračuje cílové otáčky?
Váš motor překmitává, když je nastavení PID regulátoru příliš vysoké. Zkuste snížit hodnoty proporcionální (Kp) nebo integrační (Ki) regulace. To pomůže motoru dosáhnout cílové rychlosti, aniž by došlo k přílišnému překročení rychlosti.
Mohu použít bezsenzorové ovládání pro všechny BLDC motory?
Bezsenzorové řízení můžete použít pro mnoho BLDC motorů. Funguje nejlépe při středních a vysokých rychlostech. Při velmi nízkých rychlostech nemusí bezsenzorové metody poskytovat přesnou polohu rotoru.
Jak zjistím, zda je moje ladění PID regulátoru správné?
Zkontrolujte tyto znaky:
Motor rychle dosáhne nastavené rychlosti.
Dochází k malému nebo žádnému překmitnutí.
Rychlost zůstává stabilní.
Pokud zaznamenáte velké chyby nebo chvění, upravte hodnoty PID.