1. Visió general del projecte
1.1 Antecedents del client
El client gestiona un negoci d'integració de sistemes de seguretat i serveis industrials. Els seus clients inclouen empreses de gestió immobiliària, operadors de serveis públics, instal·lacions de petroli i gas i grans plantes de fabricació. No es tracta d'empreses petites. Algunes cobreixen centenars d'acres. Algunes gestionen operacions de 24 hores on un punt de control de patrulla perdut a les 3 de la matinada no és un problema de paperassa. És una responsabilitat. Durant anys, el seu personal de patrulla portava varetes RFID, tocant targetes de punt de control en ubicacions fixes i després arxivant registres en paper al final d'un torn. El sistema va demostrar una cosa: un guàrdia arribava a un punt específic a una hora específica. Tota la resta, el que veien, en quina condició es trobava l'equip, si passava alguna cosa inusual entre els punts de control, res d'això es va capturar. Així que el client va venir a buscar un dispositiu d'inspecció intel·ligent.
1.2 Objectius del projecte
El dispositiu d'inspecció intel·ligent havia de fer diverses coses simultàniament i de manera fiable. El posicionament GPS en temps real era la base. Sense saber on es troba un treballador en un moment donat, la resta del sistema és només conjectura. Més enllà de la ubicació, el client necessitava captura de fotos i vídeo en alta definició perquè els guàrdies poguessin documentar el que realment veien, no només que havien aparegut en algun lloc.

La comunicació de veu amb la funció "Premer per parlar" va ser a la llista des del primer dia. Els guàrdies no se senten còmodes navegant pels menús del telèfon amb guants a la foscor. Un botó, comunicació instantània per ràdio, aquest era el requisit. Transmissió de dades 4G/LTE, una bateria que dura un torn complet de 12 hores com a mínim, una carcassa robusta amb classificació IP que suporti caigudes, pols i aigua, i una integració neta amb una plataforma de gestió al núvol. Això era tot l'abast.
2. Reptes de la indústria en el desenvolupament de dispositius d'inspecció intel·ligents
2.1 Precisió de posicionament
El GPS per a exteriors és manejable. El veritable problema és que els llocs industrials no són entorns purament exteriors. Barregen patis oberts amb magatzems tancats, cablejat subterrani, edificis de procés de diverses plantes i parcs de dipòsits envoltats d'estructures d'acer que dispersen els senyals dels satèl·lits en totes direccions. Un dispositiu que rastreja amb precisió a l'aparcament però perd la posició dins de la sala de calderes no resol el problema real.
Llegiu també Cas pràctic de cas de casc de seguretat intel·ligent
Des del principi es van avaluar els enfocaments de posicionament híbrid, que utilitzen balises GPS, WiFi i Bluetooth Low Energy en combinació. Cada tecnologia cobreix el que les altres no poden. El compromís és la complexitat afegida tant en el maquinari com en el programari que fusiona les dades de localització de múltiples fonts.
2.2 Transmissió de dades en temps real
Aquí teniu un escenari que val la pena considerar. Un guàrdia fotografia una connexió de canonada esquerdada a l'extrem més allunyat d'una instal·lació. El senyal 4G en aquella cantonada és feble. La foto es carrega parcialment, falla silenciosament i la sala de control no la veu mai. Ningú sap que l'informe s'ha perdut. Això és pitjor que no tenir cap foto perquè crea un buit en els registres que semblen complets.
Dissenyar per a xarxes poc fiables significa integrar al sistema la gestió de dades fora de línia. Les fotos, els registres GPS i les notes d'incidències s'emmagatzemen localment a la memòria intermèdia quan la connectivitat cau. Quan es recupera el senyal, es carreguen amb marques de temps originals precises. Càrrega de baixa latència per a dades rutinàries, lliurament final fiable per a tot el demés, són dos problemes d'enginyeria diferents que necessiten solucions.
2.3 Entorn industrial resistent
L'electrònica de consum dura unes tres setmanes en una obra abans que alguna cosa es trenqui. No és una exageració. Entra pols als ports. Els dispositius cauen sobre el formigó des de l'alçada de la cinta. Passen repetidament d'una zona d'emmagatzematge en fred a un ambient exterior calent. Les pantalles tàctils s'esquerden. Els botons es corroeixen. Res d'això és acceptable per a un dispositiu que els treballadors han d'utilitzar cada torn durant anys.
Resistència a caigudes d'almenys 1.5 metres, protecció total contra la pols, protecció contra l'entrada d'aigua i funcionament estable de -20 a 60 graus Celsius. Aquests eren els requisits físics innegociables que es van aplicar al disseny mecànic.
2.4 Restriccions de potència i tèrmiques

Executar el rastreig GPS, la connectivitat 4G activa i una càmera simultàniament en un dispositiu portàtil consumeix ràpidament la bateria. La majoria dels telèfons intel·ligents de consum es descarregarien en quatre hores amb aquesta càrrega de treball. Un torn és de dotze. Aquest interval influeix en gairebé totes les decisions d'arquitectura d'energia en el disseny. I quan els components funcionen intensament en una carcassa compacta i segellada, la calor no té cap lloc on anar fàcilment. La gestió tèrmica i la durada de la bateria són problemes estretament relacionats.
3. Disseny de l'arquitectura del sistema
3.1 Plataforma de processament central
El nucli de processament funciona amb un processador ARM Cortex-A amb una versió d'Android personalitzada a sobre. Android va ser una elecció pràctica, no només una elecció per defecte. Permet a l'equip de desenvolupament d'aplicacions avançar ràpidament a la capa de programari d'inspecció sense esperar que s'estabilitzi un sistema operatiu personalitzat. La plataforma també té una ranura NPU opcional dissenyada per a funcions d'anàlisi d'imatges d'IA, de manera que els clients que vulguin capacitats de visió artificial més endavant no necessiten un dispositiu d'inspecció intel·ligent diferent.
L'arquitectura d'arrencada segura es va integrar des del principi. Els dispositius en instal·lacions industrials són objectius de manipulació del firmware, i la seguretat de les dades que recopilen és important.
3.2 Mòdul de posicionament
El dispositiu d'inspecció intel·ligent utilitza quatre sistemes de satèl·lits alhora. L'ús de quatre sistemes permet que el dispositiu vegi més satèl·lits. Això fa que el seguiment de la ubicació sigui més ràpid i precís, fins i tot quan els edificis alts bloquegen el cel.
El sistema també utilitza "GPS assistit". Aquesta tecnologia descarrega dades de satèl·lit de la xarxa perquè el dispositiu trobi la vostra ubicació en segons en comptes de minuts. Si necessiteu rastrejar objectes dins d'un edifici, hi ha una ranura especial per afegir fàcilment un mòdul UWB.
Sistema de 3.3 càmeres
El mòdul de la càmera funciona de 8 a 16 megapíxels segons els requisits de desplegament. Enfocament automàtic, millora amb poca llum i compatibilitat opcional amb infrarojos per a operacions nocturnes. Per què importa tant la qualitat de la càmera en un context de patrulla? Una imatge suau i subexposada d'una sospita de fuita o d'una peça d'equip danyat és gairebé inútil quan algú la revisa de forma remota. La càmera no és una característica. És el sistema de proves.
3.4 Arquitectura de la Comunicació

El 4G LTE és el canal de dades principal. El WiFi 5 està disponible quan el dispositiu es troba dins de l'abast de les xarxes de les instal·lacions, cosa que estalvia costos de dades mòbils en campus amb bona cobertura sense fil. El Bluetooth 5.0 gestiona els accessoris i les dades de curt abast. El PTT sobre mòbil ofereix als guàrdies una comunicació d'estil ràdio sense maquinari separat. L'NFC gestiona l'escaneig de punts de control, un substitut net dels sistemes de targetes RFID més antics que manté intacte el flux de treball de verificació de patrulles punt per punt de control.
4. Enginyeria de PCB i maquinari
Disseny de PCB multicapa 4.1
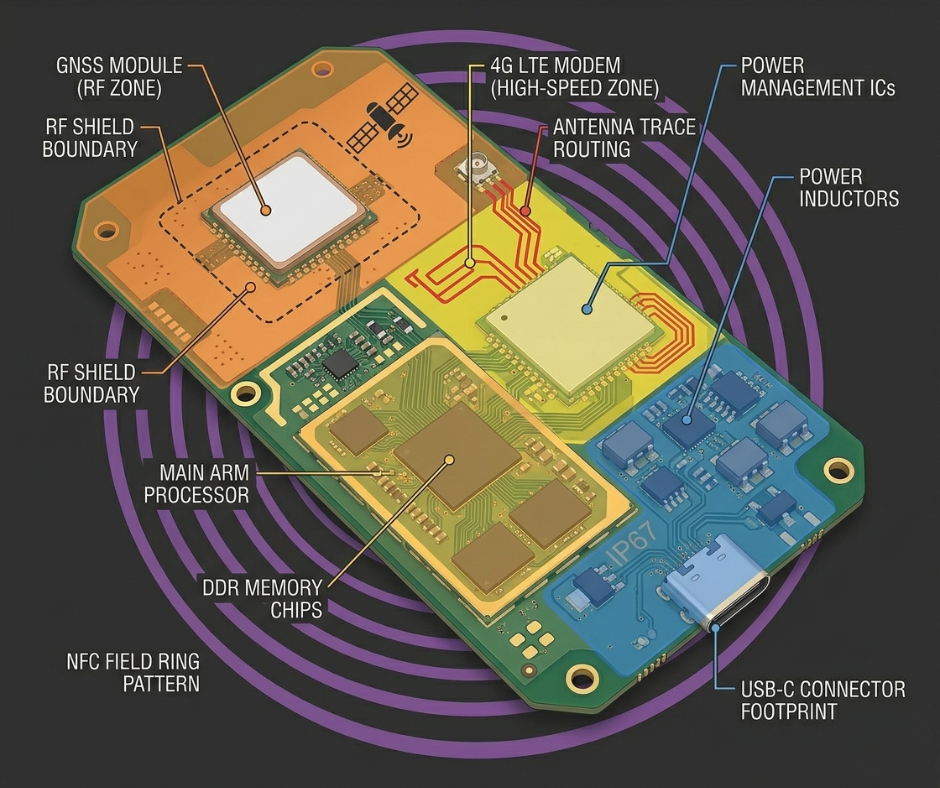
En aquest disseny es van utilitzar de sis a vuit plaques de capes. Aquest nombre de capes no es tracta només d'adaptar més traces. Es tracta de donar espai als senyals de radiofreqüència perquè es comportin correctament. Els receptors GNSS i els mòdems LTE ocupen rangs de freqüència on un mal enrutament del senyal fa que interfereixin entre si de maneres subtils. Un dispositiu que supera les proves de laboratori encara pot mostrar una degradació real si l'aïllament de radiofreqüència es va gestionar de manera descuidada. Els plans de terra, les capes d'enrutament de radiofreqüència dedicades i el blindatge EMI al voltant de seccions sensibles formaven part del disseny des de la primera revisió.
4.2 Sistema de gestió d'energia
Els objectius de capacitat de la bateria anaven dels 4,000 als 6,000 mAh. Però la capacitat bruta només és una part de la resposta. El sistema de gestió d'energia programa l'activitat del subsistema en funció dels patrons d'ús reals. La freqüència de sondeig GPS disminueix quan el dispositiu detecta un moviment mínim. La pantalla s'enfosqueix quan no s'ha produït cap interacció. El mòdem envia dades en ràfegues curtes en lloc de romandre encès tot el temps. Millora la durada de la bateria. Uns xips de seguretat especials també protegeixen la bateria de la sobrecàrrega, la baixada de nivell o el sobreescalfament. Amb la càrrega ràpida USB-C, el dispositiu d'inspecció intel·ligent pot obtenir molta energia durant una pausa curta.
4.3 Estructura de maquinari robusta
La placa de circuit imprès (PCB) es troba en un muntatge que absorbeix els impactes dins del xassís. Aquest detall importa més del que sembla. Una caiguda sobre formigó envia un impuls mecànic fort a través de tot el conjunt. Una PCB muntada rígidament transfereix aquest impuls directament a les unions de soldadura i als coixinets dels components, i un nombre suficient d'aquests esdeveniments provoquen fallades que no apareixen immediatament. El muntatge compatible absorbeix una part d'aquesta energia abans que arribi a l'electrònica. Combinada amb un marc metàl·lic intern reforçat i un segellat complet IP65/IP67, l'estructura interna està construïda per prendre's seriosament l'entorn de treball.
5. Integració de programari i plataforma
5.1 Sistema de flux de treball d'inspecció
L'aplicació gestiona l'assignació de tasques, l'escaneig de punts de control, el seguiment de patrulles en directe i la notificació d'incidents. Els treballadors veuen la ruta de patrulla assignada en un mapa senzill. Quan un guàrdia escaneja un codi QR, el sistema estalvia temps i la ubicació GPS. Així, el sistema comprova si el guàrdia funciona correctament. Si el guàrdia és lluny, el sistema indica l'escaneig com un error. Això impedeix que els guàrdies falsifiquin un escaneig des d'una ubicació diferent.
5.2 Gestió d'imatges i vídeos
Les fotos i els vídeos tenen una marca de temps i una etiqueta geogràfica en el moment de la captura, no en el moment de la càrrega. Aquesta no és una distinció menor. Si un dispositiu emmagatzema contingut multimèdia durant una interrupció de connectivitat i el puja més tard, l'etiquetatge del servidor basat en l'hora de càrrega registraria la ubicació i l'hora incorrectes. L'etiquetatge en el moment de la captura conserva registres precisos independentment de quan les dades arribin al núvol. La càrrega xifrada i la integració de l'emmagatzematge al núvol són estàndard.
5.3 Sistema de comunicació per veu
El PTT d'un sol toc connecta els treballadors al seu canal de grup a l'instant. No cal navegar pels menús ni desbloquejar la pantalla primer. Els grups de supervisors, els grups basats en zones i les emissions a tot el lloc són configurables. La funció SOS és un botó dedicat que envia una alerta amb la ubicació actual del treballador a la sala de control i obre un canal de veu automàticament.
5.4 Plataforma de gestió del backend
El tauler de control web mostra un mapa en directe dels treballadors actius amb les seves rutes de patrulla que s'actualitzen en temps real. Les dades històriques permeten als supervisors reproduir qualsevol torn anterior. Els informes s'exporten a PDF o Excel per a la documentació del client, registres d'auditoria o ús en investigació d'incidents. No cal programari especialitzat. N'hi ha prou amb un navegador.
6. IA i funcions intel·ligents (actualització opcional)
6.1 Reconeixement d'imatges per IA
La detecció de riscos de seguretat, el reconeixement d'anomalies en els equips i la supervisió del compliment de l'EPI estan disponibles com a actualitzacions que s'executen al dispositiu a través de la NPU o mitjançant la inferència al núvol, depenent dels requisits de connectivitat i latència. La resposta honesta sobre les funcions d'IA és que afegeixen valor genuí en el context adequat i una complexitat significativa en el context equivocat. Una instal·lació amb un problema específic de detecció de riscos recurrent és un bon candidat. Un programa estàndard de patrulla de propietats residencials probablement no ho és.
6.2 Alertes de geofencing
Les alertes de límits d'àrees restringides i les notificacions de punts de control perduts són funcions basades en regles que es basen en les dades GPS que el dispositiu ja recopila. La generació automàtica de resums de torns reuneix la cobertura de patrulla, els registres d'escaneig de punts de control i els informes d'incidents en un sol document al final del torn. Aquestes funcions no requereixen sensors addicionals ni canvis de maquinari.
7. Disseny Mecànic i Industrial
Disseny de carcassa robusta 7.1
La carcassa utilitza dos materials: PC i TPU. El PC la fa resistent. El TPU protegeix les cantonades perquè no es trenquin si cauen. La versió estàndard (IP65) atura la pols i la pluja. Una versió millor (IP67) és per a zones molt humides. Fem servir juntes de goma i cargols ajustats a cada botó i forat per evitar l'entrada d'aigua.
7.2 Disseny ergonòmic

La recerca de camp amb guàrdies de seguretat en actiu va influir en les decisions ergonòmiques més que qualsevol altra tendència de disseny. El funcionament amb una sola mà funciona gràcies a la ubicació dels controls, no només perquè el dispositiu és prou lleuger per subjectar-lo. El botó PTT és físic, gran i està situat on el polze aterra de manera natural. La pantalla tàctil està calibrada per a l'ús amb guants, cosa que requereix configuracions de sensibilitat capacitiva diferents de les d'un dispositiu de consum amb dits nus. La brillantor de la pantalla millora la llegibilitat a l'aire lliure sota la llum solar directa.
7.3 Gestió tèrmica
Una làmina de grafit estén la calor lluny dels punts d'accés del processador i del mòdem. Un marc intern d'alumini mou aquesta calor cap a seccions de la carcassa amb més superfície per a la dissipació passiva. El resultat és un dispositiu que es manté calent durant un torn llarg però que no resulta incòmode de subjectar i no limita la velocitat del processador per controlar la temperatura.
8. Testing i Validació
8.1 Proves funcionals
La precisió del GNSS es valida amb equips de referència en múltiples condicions de cel, no només en una zona clara i oberta amb una visibilitat perfecta. Les proves d'estabilitat 4G s'executen en entorns amb poc senyal en lloc d'un laboratori net. La resolució de la càmera i el calibratge de l'enfocament es comproven durant la producció de forma mostrejada, a més de la validació d'enginyeria.
8.2 Proves ambientals
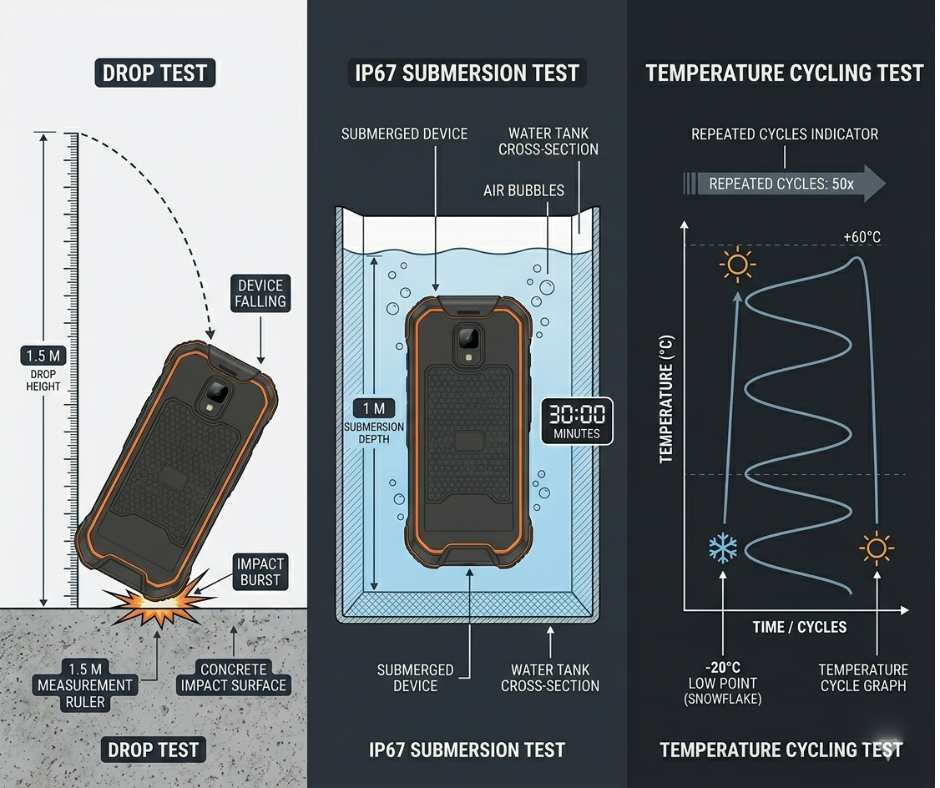
Provem les eines deixant-les caure 1.5 metres sobre formigó i acer. Les deixem caure des de diferents costats per assegurar-nos que no es trenquin. També comprovem que no hi pugui entrar pols ni aigua.
Els provem en fred extrem i calor extrema. Canviant la temperatura una vegada i una altra, comprovem si les peces es mantenen juntes. Això és més difícil per a l'eina que simplement quedar-se en un lloc calent o fred.
8.3 Proves de bateria i resistència
Les simulacions completes de torns de 12 a 15 hores s'executen sota perfils de càrrega de treball que reflecteixen l'ús real sobre el terreny, no el millor dels casos d'ús de la llum. La validació del cicle de càrrega cobreix centenars de cicles de càrrega per confirmar la retenció de la capacitat. Les proves d'envelliment impulsen les bateries més enllà de les condicions d'ús normals per comprovar el comportament de seguretat al final de la vida útil.
9. Certificació i compliment
El dispositiu d'inspecció intel·ligent porta les marques CE i FCC per a l'accés al mercat a Europa i Amèrica del Nord. El compliment de la normativa RoHS cobreix els requisits de substàncies restringides. Les classificacions IP65/IP67 es proven i es documenten, no s'autodeclaren. La certificació de bateria UN38.3 cobreix el transport segur de cel·les d'ions de liti, que és un requisit pràctic per a l'enviament internacional de dispositius.
10. Fabricació i producció en massa
10.1 DFM i estratègia de components
La revisió del disseny per a la fabricació es va dur a terme abans de finalitzar les eines. Sempre que va ser possible, es van especificar components de grau industrial amb disponibilitat documentada a llarg termini. Es van identificar fonts de components alternatives per a qualsevol cosa amb un historial de riscos a la cadena de subministrament. Això no és una precaució en si mateixa. És una gestió bàsica de programes per a un dispositiu que necessita romandre en producció i rebre suport sobre el terreny durant cinc anys o més.
10.2 SMT i muntatge
El muntatge SMT d'alta densitat funciona de manera estàndard. El procés de muntatge impermeable afegeix passos que no són presents en la producció d'electrònica de consum, com ara la instal·lació de juntes, la col·locació de segells de compressió, la fixació amb control de parell i les comprovacions d'integritat del segell abans que qualsevol unitat es consideri tancada. El flasheig i la calibració del firmware es produeixen durant el procés de producció, no com un pas posterior separat.
10.3 Control de qualitat
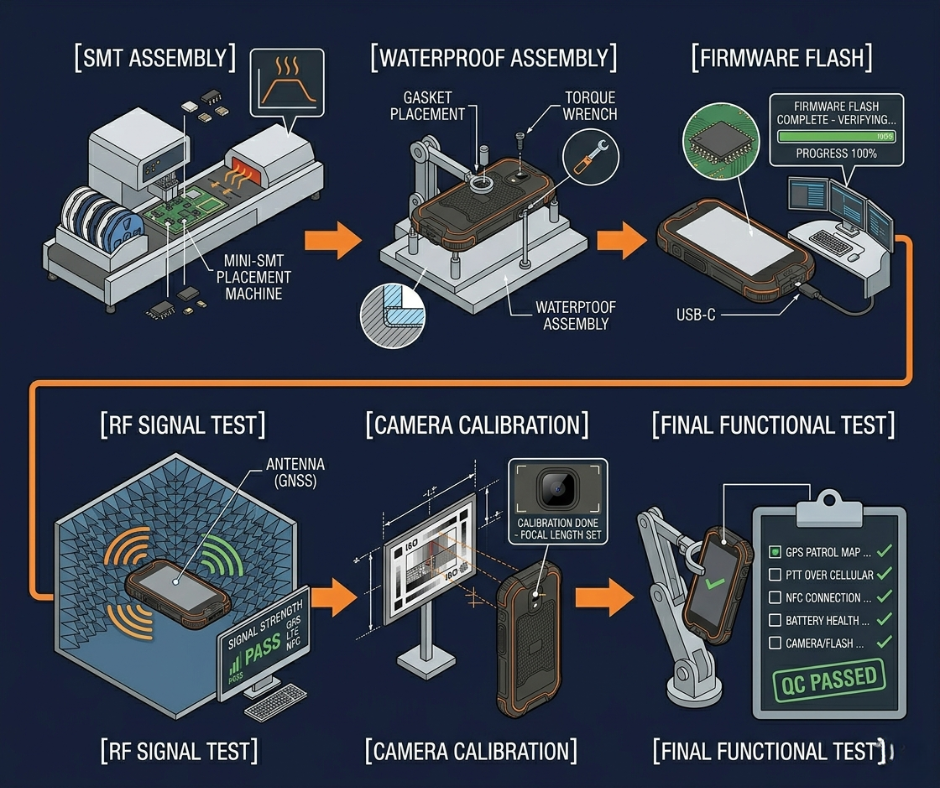
Cada unitat passa per proves funcionals del 100% que cobreixen la intensitat del senyal sense fil, el funcionament de la càmera, l'adquisició del GPS, la funció PTT i el comportament de la bateria. L'estàndard és que no arriben unitats defectuoses als clients. Detectar fallades durant la producció costa menys i causa menys danys que detectar-les després del desplegament.
11. Resultats del projecte
11.1 Assoliments tècnics
La durada mitjana de la bateria en els desplegaments de camp es va establir en 15 hores en condicions d'ús normal, cosa que significa que els guàrdies acaben els seus torns abans que els dispositius s'esgotin la bateria. El posicionament GPS es va mantenir estable en entorns exteriors i semiprotegits on realment transcorren la majoria de rutes de patrulla. La qualitat d'imatge HD va proporcionar als supervisors i clients documentació útil en lloc de fotos borroses i amb poca llum adjuntes als informes d'incidents.
11.2 Desplegament al mercat
Els desplegaments en els sectors de la gestió immobiliària i industrial van mostrar una reducció mesurable dels errors d'informes manuals. Els guàrdies no podien emplenar retroactivament els registres de patrulla, perquè el rastre GPS mostrava on anaven realment i quan. La responsabilitat de les patrulles va millorar no perquè la direcció ho fes complir amb més intensitat, sinó perquè les dades feien que la ruta real de la patrulla fos visible per a tothom.
12. Capacitat d'expansió futura
Actualització 12.1 5G
L'arquitectura de comunicació es va dissenyar tenint en compte la migració al 5G. La transmissió de vídeo en directe d'alta definició i el suport expert remot en temps real esdevenen pràctics amb el 5G de maneres que l'amplada de banda 4G no admet fàcilment. El canvi al 5G no requereix un redisseny complet del maquinari.
12.2 Integració de la ciutat intel·ligent
Els dispositius d'inspecció industrial generen dades d'ubicació, esdeveniments i sensors de manera contínua. Aquestes dades tenen valor més enllà del cas d'ús immediat de la gestió d'instal·lacions. La integració amb xarxes de sensors IoT més àmplies i plataformes unificades de gestió de ciutats o campus és un pas lògic següent per als operadors que gestionen infraestructures a escala.
13. Per què escollir-nos per al desenvolupament de dispositius intel·ligents industrials
Construir un dispositiu industrial portàtil robust és un tipus de programa diferent de construir una aplicació de consum o fins i tot un dispositiu d'inspecció intel·ligent comercial estàndard. La profunditat d'enginyeria de maquinari necessària en sistemes integrats, disseny de radiofreqüència, gestió d'energia, segellat mecànic i control tèrmic és especialitzada. Els errors en qualsevol d'aquestes àrees apareixen com a fallades de camp mesos després del desplegament, cosa que és un lloc car per trobar-los.
El nostre equip ha treballat amb aquest conjunt complet en múltiples programes industrials de mà. Disseny de PCB i RF, enginyeria de carcasses robustes, integració de plataformes IoT, programes de fabricació OEM i ODM des del primer prototip fins a la rampa de producció. Si esteu planejant un dispositiu d'inspecció intel·ligent o un terminal de patrulla industrial, preferim parlar dels requisits reals aviat que revisar una especificació que ja ha bloquejat decisions que causaran problemes més endavant.
Poseu-vos en contacte amb el nostre equip d'enginyeria per parlar de la vostra solució de maquinari d'inspecció personalitzada.