Jy ondervind spesiale probleme wanneer jy met humanoïde robotiese PCB-ontwerp werk. Gevorderde PCB-stelsels laat humanoïde robotte loop. Hulle help met intydse verwerking en gebruik baie spanningsrails. Die tabel hieronder toon hoe humanoïde behoeftes verskil van gewone PCB-behoeftes:
Aspek | Vereistes vir Humanoïde Robotiese PCB | Algemene PCB-vereistes |
|---|---|---|
Power Vereistes | Baie spanningsrails (1.8V tot 24V+) | Gewoonlik een spanningsrail |
Sensorintegrasie | Baie sensors, ondersteun baie protokolle (UART, I2C, ens.) | Min sensors |
Omgewingstoestande | Moet vibrasie, hitte en EMI hanteer | Normale toestande |
Power Management | Gevorderde stelsels met batterybestuur | Eenvoudige kragbestuur |
Verwerkingsvermoëns | Real-time verwerking met vinnige beheerlusse | Gereelde verwerking |
Jy benodig spesiale materiale en buigsame stroombane vir sterk humanoïde PCB-stelsels. Die humanoïde robotika-veld groei vinnig. Die mark kan teen 2030 $6.5 miljard bereik. Dit kan elke jaar met 138% groei. Sensors en KI maak humanoïde PCB-ontwerp anders as gewone robotika.
Humanoïde Robotiese PCB Behoeftes
Ruimte en Vormfaktor
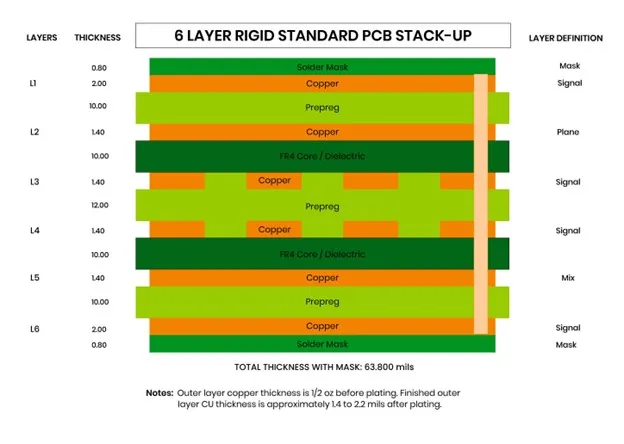
Die ontwerp van stroombaanborde vir humanoïde robotte is moeilik. Jy moet stroombaanborde in klein, geboë of bewegende dele pas. Hierdie robotte benodig borde wat nie altyd reghoeke is nie. Soms stapel jy borde bo-op mekaar. Buigsame stroombaanborde help om elektronika in arms, bene en gewrigte te pas. Die tabel hieronder toon 'n paar probleme en hoe om dit op te los:
Uitdaging | Oplossing |
|---|---|
Ruimtebeperkings | Gebruik kompakte uitlegte, meerlaag-PCB's en buigsame borde. |
Onreëlmatige vorms | Nie-reghoekige ontwerpe om by antropomorfiese strukture te pas. |
Gestapelde borde | Vertikale stapeling of buigsame PCB's vir kompakte ruimtes. |
Vervaardigers van humanoïde robotte moet dink oor wat die mark wil hê. Hulle moet sterk gedrukte borde maak wat binne-in die robot se liggaam pas. Die mark vir humanoïde PCB's word al hoe groter namate meer maatskappye aansluit.
Hoëfrekwensie materiaal
Spesiale materiale word benodig vir humanoïde robotika. Hierdie materiale help PCB's om met vinnige seine en in moeilike plekke te werk. DuPont Pyralux TK laat robotte op meer maniere beweeg. Panasonic FELIOS R-F775 help om kleiner, beter gedrukte borde te maak. Sommige materiale help met hitte en hou langer in moeilike toestande. Die tabel hieronder lys belangrike materiale en wat hulle doen:
materiaal | Prestasievoordele |
|---|---|
DuPont Pyralux TK | Maak komplekse bewegings moontlik, wat ratsheid en aanpasbaarheid in robotte verbeter. |
Panasonic FELIOS R-F775 | Dra by tot miniaturisering, wat kompakte maar hoogs presterende ontwerpe moontlik maak. |
N / A | Verbeter termiese stabiliteit en weerstand teen strawwe omgewings, wat betroubaarheid verseker. |
Jy moet die beste materiale vir elke deel van jou robot kies. Marknavorsing toon dat beter materiaal maak beter robotte. Maatskappye wat nuwe materiale gebruik, vaar beter in die mark.
Sensor- en KI-integrasie
Sensors en KI-modules help robotte om te leer en te reageer. Jy moet koppel baie sensors na jou PCB. Jy benodig ook KI-skyfies wat vinnig werk. Die SOM-6884-module laat jou toe om op te gradeer sonder om oor te begin. Dit gebruik KI-gereed verwerkers, soos die 13de Gen Intel Core, vir slim rekenaars. Jy kry vinnige verbindings met PCIe Gen4 en USB 4.0. Hierdie kenmerke help jou robot om vinnig te voel, te dink en op te tree.
Jy kan nuwe sensors of KI-modules byvoeg wanneer nodig.
Jy hou jou ontwerp oop vir toekomstige veranderinge.
Jy voldoen aan wat beide vervaardigers en gebruikers in robotika wil hê.
Die mark vir humanoïde robot-PCB's bly groei namate meer maatskappye beter materiale en slim modules gebruik. Deur die regte PCB, materiale en maniere om dinge te koppel, te kies, help jy om robotte beter te maak.
Humanoïde Robotiese PCB-ontwerp

Ontwerpstappe
Eers vind jy uit wat jou robot moet doen. Jy skryf al die vereistes neer. Volgende gebruik jy EDA-sagteware om 'n skematiese voorstelling te maak. Dit help jou om te sien hoe elke onderdeel verbind. Dan werk jy aan die uitleg en roetebepaling. Jy plaas onderdele in plek en teken lyne vir verbindings. Jy dink aan hitte en hoe die robot beweeg. Daarna kontroleer jy jou ontwerp met 'n reëlkontrole. Dit help jou om foute vroegtydig op te spoor. Nou kies en kry jy die regte materiale. Die volgende stappe is beeldvorming, stapeling, boor en platering. Jy voeg soldeerpasta by en plaas onderdele op die bord. Masjiene help om die onderdele in plek te soldeer. Jy kyk na die bord en toets of dit werk. Aan die einde maak jy dit klaar en pak die PCB.
Spesiale oorwegings in humanoïde robotika-PCB-ontwerp
Jy moet dink aan hoe die robot beweeg. Humanoïde robotte buig en draai baie. Jou ontwerp moet binne arms en gewrigte pas. Buigsame stroombane en hoëfrekwensiemateriale word dikwels gebruik. Hierdie keuses help jou PCB om langer te hou en goed te bly werk.
Ontwerp Uitdagings
Die ontwerp van humanoïde robotika-PCB's is moeilikJy benodig materiale wat kan buig en vog kan hanteer. Jy moet die buigradius dophou sodat die PCB nie breek nie. Buigsame PCB's is moeiliker om aanmekaar te sit as stywe PCB's. Jy moet elke onderdeel versigtig plaas. Hoëprestasie-ontwerpe kos meer geld. Jy moet kwaliteit en prys balanseer.
Belangrike verskille van tradisionele PCB-ontwerp
Humanoïde robotte beweeg en buig meer as gewone robotte. Gewone PCB's beweeg nie veel nie. Humanoïde ontwerpe moet buig en spanning hanteer. Jy gebruik meer sensors en benodig beter kragbeheer. Jou PCB moet meer hitte en skudding hanteer.
Buigsame stroombane
Buigsame stroombane help robotte om soos mense te beweeg. Hulle laat jou toe om sensors en aktuators in bewegende dele te plaas. Jy kan baie sensors vir harde werk gebruik. Buigsame stroombane kan meer as 200 000 keer buig. Dit maak hulle ideaal vir robotte wat baie beweeg.
Aansoek | Baat |
|---|---|
Integrasie van sensors en aktuators | Laat gewrigte natuurlik beweeg |
Hoë-digtheid sensor skikkings | Help robotte om komplekse dinge te doen |
Buigsaamheid en duursaamheid | Oorleef meer as 200 000 buigings vir aktiewe robotte |
Sein- en kragbestuur
Jy moet seine duidelik en krag stabiel hou. Gebruik spesiale spore vir vinnige seine. Hou swak seinlyne weg van sterk kraglyne om EMI te stop. Meerlaagborde help jou om grond- en kragvlakke op te stel. Gebruik spanningsreguleerders en GS-GS-omsetters vir die regte spannings. Voeg stroomsensors by om kragverbruik dop te hou en oorbelasting te stop. Goeie sein- en kragbeheer hou jou PCB veilig en werk goed.
Humanoïde Robotiese PCB-samestelling
KI-gedrewe plasing
KI-gedrewe plasing verander hoe ons humanoïde robotika-PCB-samestellings bou. Masjiene gebruik slim programme om klein onderdele op die regte plek te plaas. Dit help om onderdele met baie hoë akkuraatheid te plaas. Dit is belangrik vir geheuemodules en KI-verwerkers. Jy kry beter seine en maak minder foute. Robotiese SMT maak die werk vinniger en meer betroubaar. Hierdie stelsels doen harde werk wat mense nie met die hand kan doen nie.
KI-gedrewe plasing laat jou toe om te beheer waar onderdele gaan.
Jy maak PCB-vervaardiging vinniger en beter.
Jy verminder foute en hou robotte goed aan die gang.
3D-stroombaanintegrasie
3D-stroombaanintegrasie is nodig vir nuwe humanoïde robotika-PCB-samestelling. Op hierdie manier kan jy borde stapel en vorm vir klein of geboë ruimtes. Stroombane kan om gewrigte draai of binne arms en bene pas. Meerlaagse en metaalkern-PCB's help met hitte en veiligheid. Jy gebruik spesiale monteringsstappe om sensors, aktuators en verwerkers in stywe plekke te verbind. Dit maak humanoïde robotte sterker en meer buigsaam.
Wenk: 3D-stroombaanintegrasie bespaar spasie en help om hitte in jou humanoïde robotontwerpe te bestuur.
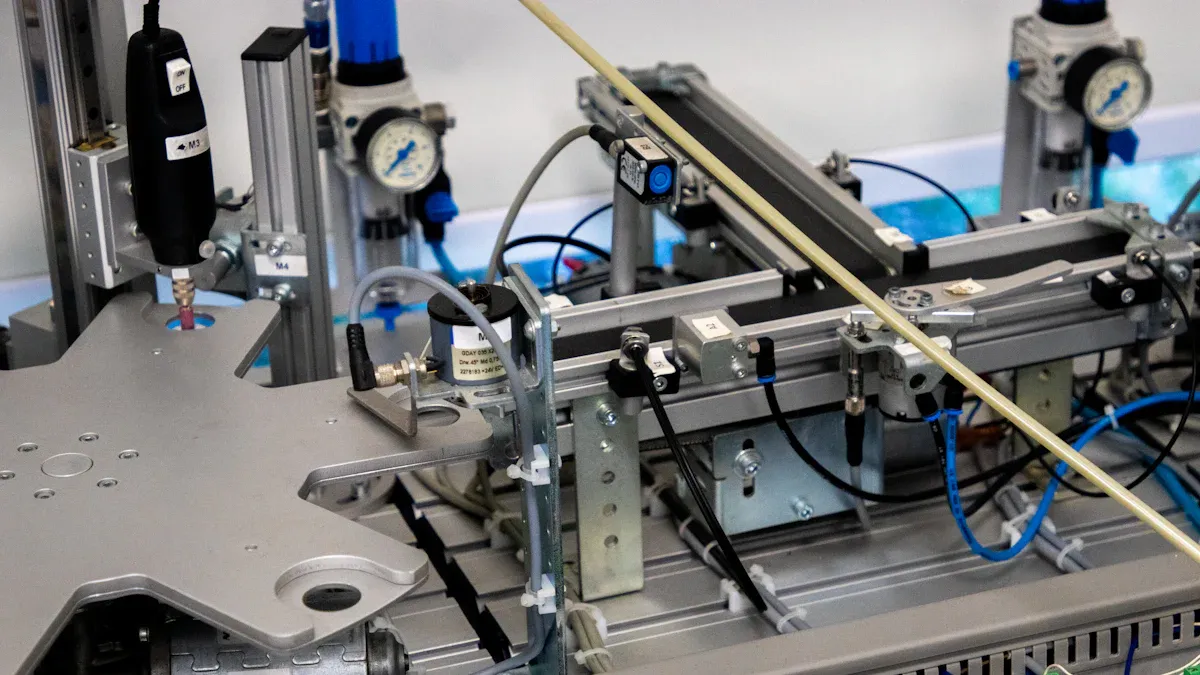
Toetsmetodes
Jy moet elke humanoïde robotika-PCB-samestelling toets om seker te maak dit werk. Baie toetse help om probleme op te spoor en robotte veilig te hou. Optiese en X-straalkontroles vind dinge wat jy nie kan sien nie. Robotte met kameras soek na soldeer- en plasingsfoute. Vlieënde sondetoetsing kontroleer stroombane sonder spesiale gereedskap. Hoëspanningsspanningstoetse vind versteekte probleme wat later probleme kan veroorsaak.
Toetsmetode | Beskrywing | Voordele |
|---|---|---|
Toets vir vlieënde sonde | Gebruik bewegende probes om punte met sagteware te toets. | Goed vir klein tot medium aantal borde. |
Hoëspanningsspanningstoets | Vind isolasieprobleme met hoëspanningspulse. | Vind defekte wat ander toetse dalk mis. |
Jy toets ook vir oop en kortsluitings. Jy meet weerstand en kapasitansie. Jy kyk vir polariteitsfoute en klein kortsluitings. Jy soek vir faseverskille. Hierdie stappe help jou om probleme vroegtydig op te spoor en jou PCB-samestelling sterk te hou.
Die hoëspanningsstrestoets is die sleutel om isolasieprobleme te vind. Jy stuur hoëspanningspulse tussen seinlyne. Hierdie toets vind probleme wat ander toetse dalk nie sal sien nie. Hierdie gevorderde toetse help om jou humanoïde robotte teen faal te beskerm.
Stabiele verbindings
Stabiele verbindings word benodig in elke humanoïde robotika-PCB-samestelling. Robotte beweeg, buig en draai baie. Jy benodig sterk soldeerverbindings en goeie verbindings. Buigsame stroombane help om verbindings veilig te hou wanneer onderdele beweeg. Spesiale materiale en ontwerpe keer dat drade breek. Metaalkern-PCB's help met hitte en hou verbindings sterk. Jy kontroleer elke verbinding tydens die bou om seker te maak jou robot werk in moeilike plekke.
Stabiele verbindings hou robotte veilig en aan die gang.
Jy stop seinverlies en kragprobleme.
Jy help jou humanoïde robotika-PCB-samestelling langer hou.
IoT en Emerging Tech
IoT-konnektiwiteit
Die Internet van Dinge (IoT) verander hoe mense PCB-stelsels in humanoïde robotte ontwerp en gebruik. Die IoT laat robotte met ander toestelle kommunikeer en inligting deel. Dit help robotte om beter keuses te maak en vinniger op te tree. Jy benodig sterk verbindings om motors, sensors en verwerkers te verbind. Goeie verbindings help jou PCB goed te werk en robotte veilig te hou. KI werk saam met die IoT om robotte te help om op hul eie te dink. Wanneer jy sterk hardeware bou, kan jou robotte op baie plekke werk.
Verbindingsstukke verbind hardeware-onderdele sodat robotte kan beweeg en voel.
IoT laat robotte toe om data te deel en te leer uit wat rondom hulle is.
KI en IoT help robotte saam om hul eie besluite te neem.
Sterk verbindings ondersteun motors, sensors en verwerkers vir beter werk.
GaN-toestelle
GaN-toestelle help om humanoïde robotte vinniger en meer doeltreffend te maak. GaN staan vir galliumnitried. Dit werk op baie maniere beter as silikon. Jy kry kleiner en ligter borde wat in beknopte ruimtes pas. GaN help jou PCB om meer krag en hitte te hanteer. Dit beteken dat robotte langer hou en minder energie gebruik. Die tabel hieronder toon waarom GaN 'n goeie keuse is vir robotika-PCB-ontwerp.
Advantage | Beskrywing |
|---|---|
Hoë elektronmobiliteit | Jy kry vinnige bewerkings en vinniger skakelspoed. |
Wye bandgap | Jou PCB kan hoër spannings hanteer en betroubaar bly. |
Uitstekende termiese geleidingsvermoë | Jou borde bestuur hitte beter, sodat robotte veilig bly. |
Miniaturiseringsvermoëns | Jy maak kleiner en ligter toestelle vir kompakte robotte. |
Energie-doeltreffendheid | Robotte gebruik minder krag en werk langer voordat hulle laai. |
Toekomstige tendense
Jy sal sien nuwe veranderinge in humanoïde Robotiese PCB-ontwerp en -vervaardiging. Die Internet van Dinge (IoT) sal aanhou groei, so robotte sal met meer toestelle konnekteer. GaN-toestelle sal meer in robotika gebruik word, wat PCB's kleiner en sterker maak. Buigsame stroombane sal robotte help om op nuwe maniere te beweeg. Vervaardigers sal KI gebruik om te verbeter hoe hulle robotte bou en toets. Nuwe materiale sal PCB's help om langer te hou en beter te werk. Jy moet hierdie veranderinge dophou om voor te bly in robotika en PCB-vervaardiging.
Wenk: Hou aan om te leer oor nuwe PCB-tegnologieë en -materiale. Dit help jou om beter humanoïde robotte te bou en 'n leier in robotika-vervaardiging te wees.
Verifikasie in Humanoïde Robotiese PCB
Verifikasie kontroleer of jou PCB veilig in elke robot werk. Jy moet beide hardeware en sagteware toets. Hierdie stap help jou om probleme te vind voordat jy die robot gebruik. Jy moet sterk toetse gebruik en belangrike reëls volg. Goeie verifikasie verhoed dat jou robot faal en hou mense veilig.
Verifikasiedoelwitte
Versekering van funksionele integriteit
Jy wil hê jou PCB moet op die regte manier werk. Elke onderdeel moet sy werk doen. Jy kyk of seine reg beweeg en krag goed vloei. Jy soek vir oop stroombane of kortsluitings voordat jy die bord maak. Ontwerpbeoordelings en reëlkontroles help jou om foute vroegtydig te vind. Hoë gehalte beteken dat jou robot sal beweeg en reageer soos jy wil.
Voldoen aan Veiligheids- en Nakomingsstandaarde
Jy moet veiligheidsreëls in robotika volg. Hierdie reëls hou mense en masjiene veilig. Baie groepe maak hierdie reëls, soos OSHA, ISO en ANSI. Jy moet seker maak of jou PCB aan hierdie reëls voldoen voordat jy dit maak.
OSHA maak reëls om gesondheids- en veiligheidsrisiko's by die werk in die Verenigde State te verlaag. OSHA wil ook hê dat maatskappye werkers oplei en leer om werk veilig en gesond te hou.
Hier is 'n paar belangrike standaarde vir humanoïde robotika:
Standaard/Regulasie | Beskrywing |
|---|---|
ISO 10218 | Stel reëls vir die veiligheid van industriële robotte vas. |
ISO 13849 | Fokus op veiligheidsonderdele van beheerstelsels. |
ANSI/RIA R15.06 | Maak seker dat samewerkende robotveiligheid dieselfde is in die VSA |
CSA Z434 | Dek samewerkende robotveiligheid in Kanada. |
ISO 13482 | Is vir persoonlike sorg- en diensrobotte. |
Jy moet ook reëls van groepe soos die FAA, FCC, FDA en privaatheidswette volg.
Validering van sensor- en KI-integrasie
Sensors en KI-modules help jou robot sintuig en dink. Jy moet kyk of hierdie dele saamwerk. Jy toets of sensors die regte data stuur en of KI-skyfies dit vinnig verwerk. Jy maak seker dat jou PCB baie sensors en slim modules kan hanteer. Hierdie stap hou jou robot slim en veilig.
Verifikasiemetodes
Simulasie en modellering
Jy gebruik simulasie-instrumente om jou PCB te toets voordat jy dit bou. Hierdie instrumente wys hoe seine beweeg en hoe hitte versprei. Jy kan probleme vroeg opspoor en dit in jou ontwerp oplos. Modellering help jou om tyd en geld te bespaar.
In-kring-toetsing (IKT)
In-stroombaan toetsing kontroleer elke onderdeel op jou PCB. Jy gebruik probes om verbindings te toets en te soek vir kortsluitings of oop stroombane. IKT help jou om probleme te vind wat jou robot kan keer om te werk. Hierdie metode is baie belangrik vir komplekse, veellaagige ontwerpe.
Funksionele toetsing
Funksionele toetsing kontroleer of jou PCB doen wat jy wil hê. Jy laat die bord loop en kyk of dit motors, sensors en KI-skyfies beheer. Jy soek intyds vir foute. Hierdie stap maak seker dat jou robot kan beweeg, waarneem en reageer soos beplan.
Omgewings- en strestoetsing
Jy toets jou PCB in moeilike toestande. Jy skud dit, verhit dit en verkoel dit. Jy kyk of dit werk na baie buigings en kinkels. Omgewings- en spanningstoetsing help jou om te sien of jou PCB in 'n regte robot sal hou. Jy wil hê jou bord moet vibrasie, hitte en EMI oorleef.
Uitdagings in Verifikasie
Jy moet hoë gehalte in jou PCB handhaaf vir behoorlike robotwerk.
Jy moet risiko's verminder, veral in veiligheidswerk.
Jy moet jou ontwerp hersien en kyk vir oop stroombane of kortsluitings voordat jy dit maak.
Kompleksiteit van meerlaagontwerpe
Meerlaagse PCB's maak kontrole moeiliker. Jy het meer verbindings en meer plekke vir foute. Jy benodig sterk toetse om elke laag te kontroleer. Ontwerpreëlkontroles help jou om verborge probleme te vind.
Validering van intydse dataverwerking
Humanoïde robotte benodig vinnige dataverwerking. Jy moet toets of jou PCB intydse seine van sensors en KI-skyfies kan hanteer. Jy soek na vertragings of foute wat jou robot kan vertraag.
Integrasie van Buigsame en Starre Stroombane
Jy gebruik dikwels beide buigsame en rigiede stroombane in humanoïde robotte. Jy moet kyk of hierdie dele saamwerk. Jy toets of verbindings sterk bly na baie buigings. Hierdie stap help jou PCB om langer te hou in bewegende robotte.
Beste praktyke vir verifikasie
Beste praktyk | Beskrywing |
|---|---|
Versameling van robuuste betroubaarheidsdata | Nodig vir toekomstige standaardbelyning verder as ou maniere. |
Implementering van oorbodige veiligheidsbeheerstelsels | Nodig om hoëvlak-outonomie te oorheers deur sterk sensors te gebruik. |
Na aanleiding van gevestigde veiligheidsstandaarde | Volg ISO 13849 en ANSI/RIA-reëls vir robotveiligheid. |
Vroeë Verifikasie in die Ontwerpsiklus
Begin vroegtydig met kontrole. Jy sien foute raak voordat hulle groot word. Vroeë kontrole bespaar tyd en geld.
Outomatiese toetsstelsels
Gebruik outomatiese toetsstelsels om jou PCB na te gaan. Masjiene kan vinniger toets en meer foute vind as mense. Outomatiese stelsels help jou om hoë gehalte in elke bord te handhaaf.
Deurlopende Terugvoer en Iterasie
Hou aan om jou PCB te toets en te verbeter. Gebruik terugvoer van elke toets om jou ontwerp te verbeter. Deurlopende kontroles help jou om veiliger en sterker robotte te bou.
Wenk: Humanoïde robotiese PCB's benodig meer toetsing as algemene robotika. Jy moet in-stroombaan toetsing, funksionele toetsing en selfs X-straaltoetse gebruik om seker te maak elke onderdeel werk. Algemene robotika-PCB's benodig dalk nie sulke streng toetse nie.
verifieer
Jy moet seker maak dat jou humanoïde robot se PCB volgens plan werk. Verifikasie beteken dat jy elke onderdeel en elke stap nagaan. Jy wil hê jou robot moet sonder foute beweeg, voel en dink. As jy hierdie stap oorslaan, kan jou robot faal of selfs onveilig word.
Wenk: altyd toets jou PCB voordat jy dit in 'n robot gebruik. Dit help jou om probleme vroegtydig op te spoor.
Jy kan verskillende maniere gebruik om jou PCB te verifieer:
Visuele inspeksie: Kyk na die bord. Kontroleer vir ontbrekende dele of slegte soldeerverbindings.
Outomatiese toetsing: Gebruik masjiene om stroombane en verbindings te toets. Masjiene vind klein foutjies wat jy dalk mis.
Simulasie: Toets jou ontwerp op 'n rekenaar. Kyk hoe seine beweeg en hoe hitte versprei.
Funksionele toetsing: Laat die bord met motors en sensors loop. Kyk of alles werk soos dit moet.
Omgewingstoetsing: Plaas jou PCB in warm, koue of bewerige plekke. Maak seker dit werk steeds.
Hier is 'n tabel om jou te help om die belangrikste verifikasiestappe te onthou:
stap | Wat jy nagaan |
|---|---|
Visuele inspeksie | Onderdele, soldeersel en bordvorm |
Outomatiese toetsing | Stroombane, kortsluitings en oop lyne |
Simulasie | Seinvloei en hitte |
Funksionele toetsing | Motors, sensors en KI-skyfies |
Omgewingstoets | Hitte, koue en vibrasie |
Jy moet rekords hou van jou toetse. Skryf neer wat jy vind. As jy 'n probleem sien, maak dit reg en toets weer. Goeie verifikasie help jou om veilige en slim robotte te bou. Jy kan jou PCB vertrou wanneer jy hierdie stappe volg.
Jy kan beter humanoïde robotte maak deur goeie PCB-ontwerpstappe te gebruik. Verdeel groot werk in kleiner take om met montering te help. Dink aan mense se behoeftes om bouwerk veiliger te maak. Die tabel hieronder lys maniere om aan te hou verbeter:
Strategie | Beskrywing |
|---|---|
Hiërargiese Taakontbinding | Verdeel moeilike take in maklike stappe. |
Mens-sentriese ontwerp | Stel mense eerste vir veiliger bouwerk. |
Proaktiewe Geïntegreerde Ontwerp | Gebruik slimpraatjies vir beter spanwerk. |
Nuwe materiale, KI en IoT help om sterker PCB's vir humanoïde robotte te maak. Hou aan leer oor nuwe robotika-tegnologie om seker te maak jou PCB werk goed en jou robotte is gereed vir wat volgende kom.
FAQ
Wat maak humanoïde robotiese PCB's anders as gewone PCB's?
Humanoïde robotiese PCB's gebruik buigsame stroombane en spesiale materiale. Hulle het ook baie sensors. Hierdie kenmerke help robotte om te beweeg, te buig en te dink. Gewone PCB's hoef nie soveel beweging te hanteer nie. Hulle doen ook nie soveel moeilike take nie.
Hoe toets jy 'n humanoïde robotiese PCB?
Jy kyk na die bord met jou oë. Jy gebruik masjiene om vir foute te kyk. Jy toets jou ontwerp op 'n rekenaar. Jy voer toetse uit met motors en sensors. Jy toets ook met hitte en skudding. Hierdie stappe help jou om probleme vroegtydig te vind.
Waarom benodig humanoïde robotte buigsame stroombane?
Buigsame stroombane pas binne-in arms, bene en gewrigte. Jy kan hulle baie keer buig en draai. Dit help jou robot om soos 'n mens te beweeg. Dit hou ook die verbindings sterk.
Watter materiale werk die beste vir humanoïde robotiese PCB's?
U moet dit gebruik DuPont Pyralux TK en Panasonic FELIOS R-F775. Hierdie materiale help jou PCB om langer te hou. Hulle hanteer hitte en ondersteun vinnige seine. Hulle maak ook jou robot veiliger en meer betroubaar.
Kan jy sensors en KI-modules maklik opgradeer?
Ja! Jy kan nuwe sensors of KI-skyfies byvoeg wanneer jy wil. Jy hoef nie die hele PCB te verander nie. Oop ontwerpe en slim modules help jou om op te gradeer soos tegnologie verbeter.
Wenk: Hou altyd jou PCB-ontwerp oop vir opgraderings. Dit help jou robot om slim en gereed te bly vir nuwe take.