Vi alfrontas specialajn problemojn kiam vi laboras kun humanoida robota PCB-dezajno. Altnivelaj PCB-sistemoj funkciigas humanoidajn robotojn. Ili helpas kun realtempa prilaborado kaj uzas multajn tensiorelojn. La suba tabelo montras kiel humanoidaj bezonoj diferencas de regulaj PCB-bezonoj:
aspekto | Postuloj por Humanoidaj Robotaj PCB-oj | Ĝeneralaj PCB-Postuloj |
|---|---|---|
Potencaj Postuloj | Multaj tensioreloj (1.8V ĝis 24V+) | Kutime unu tensiorelo |
Sensila Integriĝo | Multaj sensiloj, subtenas multajn protokolojn (UART, I2C, ktp.) | Malmultaj sensiloj |
Mediaj Kondiĉoj | Devas pritrakti vibradon, varmon kaj EMI-on | Normalaj kondiĉoj |
Potenca Administrado | Altnivelaj sistemoj kun bateria administrado | Simpla energiadministrado |
Pretigaj Kapabloj | Realtempa prilaborado kun rapidaj kontrolbukloj | Regula prilaborado |
Vi bezonas specialajn materialojn kaj flekseblajn cirkvitojn por fortaj humanoidaj cirkvitaj cirkvitsistemoj. La kampo de humanoida robotiko rapide kreskas. La merkato povus atingi 6.5 miliardojn da dolaroj antaŭ 2030. Ĝi povus kreski je 138% ĉiujare. Sensiloj kaj artefarita inteligenteco diferencigas la dezajnon de humanoidaj cirkvitaj cirkvitoj de la funkciado de regula robotiko.
Bezonoj pri Humanoidaj Robotaj PCB-oj
Spaco kaj Formo-faktoro
Dezajni cirkvitplatojn por humanoidaj robotoj estas malfacila. Oni devas enmeti cirkvitplatojn en malgrandajn, kurbajn aŭ movajn partojn. Ĉi tiuj robotoj bezonas platojn, kiuj ne ĉiam estas rektanguloj. Iafoje, oni stakigas platojn unu sur la alia. Flekseblaj cirkvitplatoj helpas enmeti elektronikon en brakojn, krurojn kaj artikojn. La suba tabelo montras kelkajn problemojn kaj kiel solvi ilin:
defio | solvaĵo |
|---|---|
Spacaj Limoj | Uzu kompaktajn aranĝojn, plurtavolajn cirkvitojn, kaj flekseblajn platojn. |
Neregulaj Formoj | Ne-rektangulaj dezajnoj por konveni al antropomorfaj strukturoj. |
Staplitaj tabuloj | Vertikala stakado aŭ flekseblaj cirkvitoj por kompaktaj spacoj. |
Fabrikistoj de humanoidaj robotoj devas pripensi, kion la merkato volas. Ili bezonas fari fortajn presitajn platojn, kiuj taŭgas en la korpon de la roboto. La merkato por humanoidaj cirkvitplatoj daŭre kreskas, ĉar pli da kompanioj aliĝas.
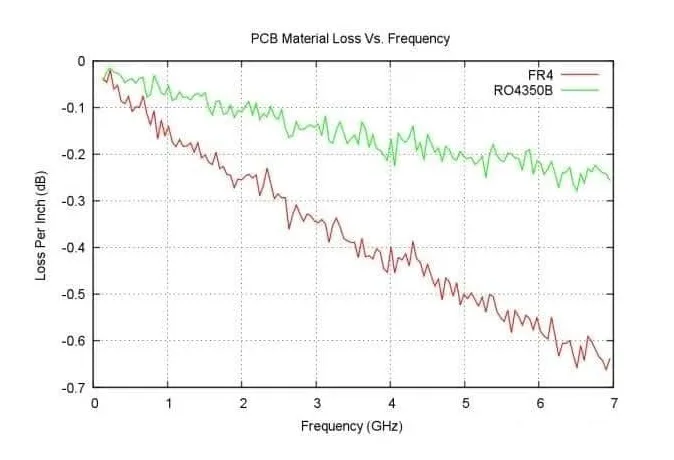
Altfrekvencaj Materialoj
Specialaj materialoj estas bezonataj por humanoida robotiko. Ĉi tiuj materialoj helpas cirkvitajn cirkvitojn (PCB) funkcii kun rapidaj signaloj kaj en malfacilaj lokoj. DuPont Pyralux TK permesas al robotoj moviĝi laŭ pli da manieroj. Panasonic FELIOS R-F775 helpas fari pli malgrandajn, pli bonajn presitajn platojn. Kelkaj materialoj helpas kun varmo kaj daŭras pli longe en malfacilaj kondiĉoj. La suba tabelo listigas gravajn materialojn kaj kion ili faras:
materialo | Elfaraj Profitoj |
|---|---|
DuPont Pyralux TK | Ebligas kompleksajn movojn, plibonigante facilmovecon kaj adaptiĝkapablon en robotoj. |
Panasonic FELIOS R-F775 | Kontribuas al miniaturigo, ebligante kompaktajn sed alt-efikecajn dezajnojn. |
N / A | Plibonigas termikan stabilecon kaj reziston al severaj medioj, certigante fidindecon. |
Vi devas elekti la plej bonajn materialojn por ĉiu parto de via roboto. Merkata esplorado montras, ke pli bonaj materialoj fari pli bonajn robotojn. Firmaoj kiuj uzas novajn materialojn fartas pli bone en la merkato.
Integriĝo de Sensiloj kaj AI
Sensiloj kaj artefarita inteligenteco-moduloj helpas robotojn lerni kaj reagi. Vi bezonas konekti multajn sensilojn al via cirkvitkarto. Vi ankaŭ bezonas AI-blatojn, kiuj funkcias rapide. La modulo SOM-6884 permesas al vi ĝisdatigi sen rekomenci. Ĝi uzas AI-pretajn procesorojn, kiel la 13-a generacio Intel Core, por inteligenta komputado. Vi ricevas rapidajn konektojn per PCIe Gen4 kaj USB 4.0. Ĉi tiuj funkcioj helpas vian roboton senti, pensi kaj agi rapide.
Vi povas aldoni novajn sensilojn aŭ AI-modulojn kiam necese.
Vi tenas vian dezajnon malfermita por estontaj ŝanĝoj.
Vi plenumas tion, kion kaj fabrikantoj kaj uzantoj deziras en robotiko.
La merkato por humanoidaj robotaj cirkvitaj cirkvitoj daŭre kreskas, ĉar pli da kompanioj uzas pli bonajn materialojn kaj inteligentajn modulojn. Elektante la ĝustajn cirkvitajn cirkvitojn, materialojn kaj manierojn konekti aferojn, vi helpas plibonigi robotojn.
Humanoida Robotika PCB-Dezajno

Dezajnaj Paŝoj
Unue, vi malkovras, kion via roboto bezonas fari. Vi skribas ĉiujn postulojn. Poste, vi uzas EDA-programaron por fari skemon. Ĉi tio helpas vin vidi kiel ĉiu parto konektiĝas. Poste, vi laboras pri la aranĝo kaj vojigo. Vi metas partojn en siajn lokojn kaj desegnas liniojn por konektoj. Vi pripensas varmon kaj kiel la roboto moviĝas. Post tio, vi kontrolas vian dezajnon per regulkontrolo. Ĉi tio helpas vin kapti erarojn frue. Nun, vi elektas kaj akiras la ĝustajn materialojn. La sekvaj paŝoj estas bildigo, stakado, borado kaj tegado. Vi aldonas lutaĵpaston kaj metas partojn sur la platon. Maŝinoj helpas luti la partojn en siajn lokojn. Vi rigardas la platon kaj testas ĉu ĝi funkcias. Fine, vi finas kunmeti ĝin kaj pakas la cirkvitan cirkviton.
Specialaj Konsideroj en Humanoida Robotika PCB-Dezajno
Vi devas pripensi kiel la roboto moviĝas. Humanoidaj robotoj multe fleksiĝas kaj tordiĝas. Via dezajno devas konveni ene de brakoj kaj artikoj. Flekseblaj cirkvitoj kaj altfrekvencaj materialoj ofte estas uzataj. Ĉi tiuj elektoj helpas vian cirkvitan cirkviton daŭri pli longe kaj daŭre funkcii bone.
Defioj de Dezajno
Dezajni humanoidajn robotikajn cirkvitajn cirkvitojn estas malfacile.Vi bezonas materialojn, kiuj povas fleksiĝi kaj pritrakti humidon. Vi devas atenti la kurbradiuson por ke la cirkvito ne rompiĝu. Flekseblajn cirkvitojn estas pli malfacile kunmeteblaj ol rigidajn. Vi devas meti ĉiun parton zorge. Alt-efikecaj dezajnoj kostas pli da mono. Vi devas balanci kvaliton kaj prezon.
Ŝlosilaj Diferencoj kompare al Tradicia PCB-Dezajno
Humanoidaj robotoj moviĝas kaj fleksiĝas pli ol ordinaraj. Ordinaraj cirkvitaj cirkvitoj ne multe moviĝas. Humanoidaj dezajnoj devas fleksiĝi kaj pritrakti streĉon. Vi uzas pli da sensiloj kaj bezonas pli bonan potenckontrolon. Via cirkvito cirkvito devas trakti pli da varmo kaj skuado.
Flekseblaj Cirkvitoj
Flekseblaj cirkvitoj helpas robotojn moviĝi kiel homoj. Ili permesas al vi meti sensilojn kaj aktuatorojn en moviĝantajn partojn. Vi povas uzi multajn sensilojn por malfacilaj taskoj. Flekseblaj cirkvitoj povas fleksiĝi pli ol 200 000 fojojn. Tio igas ilin bonegaj por robotoj, kiuj multe moviĝas.
Apliko | profito |
|---|---|
Integriĝo de sensiloj kaj aktuatoroj | Permesas al artikoj moviĝi nature |
Alt-densecaj sensoraj aroj | Helpas robotojn fari kompleksajn aferojn |
Fleksebleco kaj fortikeco | Postvivas pli ol 200 000 kurbiĝojn por aktivaj robotoj |
Signalo kaj Potenco-Administrado
Vi bezonas teni signalojn klarajn kaj potencon stabila. Uzu specialajn spurojn por rapidaj signaloj. Tenu malfortajn signalliniojn for de fortaj alttensiaj linioj por ĉesigi EMI-on. Plurtavolaj platoj helpas vin starigi terajn kaj potencajn ebenojn. Uzu tensioregulilojn kaj kontinukurent-kurentajn konvertilojn por la ĝustaj tensioj. Aldonu kurentsensilojn por kontroli la potencon kaj ĉesigi troŝarĝojn. Bona signalo kaj potencokontrolo tenas vian cirkvitan platon sekura kaj bone funkcianta.
Humanoida Robotika PCB-Asembleo
AI-Movita Allokigo
AI-movita lokigo ŝanĝas kiel ni konstruas humanoidajn robotajn cirkvitajn cirkvitajn asembleojn. Maŝinoj uzas inteligentajn programojn por meti malgrandajn partojn en la ĝustan lokon. Tio helpas loki partojn kun tre alta precizeco. Ĝi gravas por memormoduloj kaj artefarita inteligenteco-procesoroj. Vi ricevas pli bonajn signalojn kaj faras malpli da eraroj. Robota SMT igas la laboron pli rapida kaj pli fidinda. Ĉi tiuj sistemoj faras malfacilajn taskojn, kiujn homoj ne povas fari permane.
AI-movita lokigo permesas al vi kontroli kien partoj iras.
Vi plirapidigas kaj plibonigas la fabrikadon de cirkvitaj cirkvitoj.
Vi malpliigas erarojn kaj subtenas la bonan funkciadon de robotoj.
3D-Cirkvita Integriĝo
3D-cirkvita integriĝo estas necesa por la muntado de novaj humanoidaj robotaj cirkvitaj cirkvitoj. Tiel, vi povas stakigi kaj formi platojn por malgrandaj aŭ kurbaj spacoj. Cirkvitoj povas volviĝi ĉirkaŭ artikoj aŭ konveni ene de brakoj kaj kruroj. Plurtavolaj kaj metalkernaj cirkvitoj helpas kun varmo kaj sekureco. Vi uzas specialajn muntadajn paŝojn por konekti sensilojn, aktuatorojn kaj procesorojn en malvastaj lokoj. Tio igas humanoidajn robotojn pli fortaj kaj pli flekseblaj.
Konsilo: 3D-cirkvita integriĝo ŝparas spacon kaj helpas administri varmon en viaj humanoidaj robotaj dezajnoj.
Testaj Metodoj
Vi devas testi ĉiun humanoidan robotikan cirkvitan cirkvitan asembleon por certigi, ke ĝi funkcias. Multaj testoj helpas trovi problemojn kaj teni robotojn sekuraj. Optikaj kaj Rentgenaj kontroloj trovu aferojn, kiujn vi ne povas vidi. Robotoj kun fotiloj serĉas erarojn pri lutado kaj lokigo. Fluganta sondilo kontrolas cirkvitojn sen specialaj iloj. Alttensiaj streĉtestoj trovas kaŝitajn problemojn, kiuj povus kaŭzi problemojn poste.
Provanta Metodo | Priskribo | profitoj |
|---|---|---|
Fluga Sonda Testado | Uzas moviĝantajn sondilojn por testi punktojn per programaro. | Bona por malgrandaj ĝis mezgrandaj nombroj da tabuloj. |
Alta Tensio Stresa Testo | Trovas izolitecajn problemojn kun alttensiaj pulsoj. | Trovas difektojn, kiujn aliaj testoj eble preteratentis. |
Vi ankaŭ testas malfermajn kaj kurtajn cirkvitojn. Vi mezuras reziston kaj kapacitancon. Vi kontrolas polusajn erarojn kaj malgrandajn kurtojn. Vi serĉas fazdiferencojn. Ĉi tiuj paŝoj helpas vin trovi problemojn frue kaj konservi vian cirkvitan cirkvitan asembleon forta.
La alttensia streĉtesto estas ŝlosila por trovi izolajn problemojn. Vi sendas alttensiajn pulsojn inter signallinioj. Ĉi tiu testo trovas problemojn, kiujn aliaj testoj eble ne vidas. Ĉi tiuj altnivelaj testoj helpas protekti viajn humanoidajn robotojn kontraŭ paneoj.
Stabilaj Konektoj
Stabilaj konektoj estas bezonataj en ĉiu humanoida robotika cirkvitkarto. Robotoj moviĝas, fleksiĝas kaj tordiĝas multe. Vi bezonas fortajn lutaĵojn kaj bonajn konektilojn. Flekseblaj cirkvitoj helpas teni la konektojn sekuraj kiam partoj moviĝas. Specialaj materialoj kaj dezajnoj malhelpas dratojn rompiĝi. Metalkernaj cirkvitkartoj helpas kontraŭ varmo kaj tenas la konektojn fortaj. Vi kontrolas ĉiun konekton dum konstruado por certigi, ke via roboto funkcias en malfacilaj lokoj.
Stabilaj konektoj tenas robotojn sekuraj kaj funkciantaj.
Vi ĉesigas signalperdon kaj potencajn problemojn.
Vi helpas vian humanoidan robotikan cirkvitan cirkvitan asembleon daŭri pli longe.
IoT kaj Emerging Tech
IoT-Konektebleco
IoT ŝanĝas kiel homoj desegnas kaj uzas cirkvitajn cirkvitajn sistemojn en humanoidaj robotoj. IoT permesas al robotoj komuniki kun aliaj aparatoj kaj dividi informojn. Ĉi tio helpas robotojn fari pli bonajn elektojn kaj agi pli rapide. Vi bezonas fortajn konektilojn por kunigi motorojn, sensilojn kaj procesorojn. Bonaj konektoj helpas vian cirkvitan cirkviton funkcii bone kaj teni robotojn sekuraj. AI kunlaboras kun IoT por helpi robotojn pensi memstare. Kiam vi konstruas fortan aparataron, viaj robotoj povas funkcii en multaj lokoj.
Konektiloj ligas aparatarajn partojn por ke robotoj povu moviĝi kaj senti.
IoT permesas al robotoj dividi datumojn kaj lerni de tio, kio estas ĉirkaŭ ili.
AI kaj IoT kune helpas robotojn fari siajn proprajn decidojn.
Fortaj konektoj subtenas motorojn, sensilojn kaj procesorojn por pli bona laboro.
GaN-Aparatoj
GaN-aparatoj helpas fari humanoidajn robotojn pli rapidaj kaj pli efikaj. GaN signifas galiumnitridon. Ĝi funkcias pli bone ol silicio laŭ multaj manieroj. Vi ricevas pli malgrandajn kaj pli malpezajn platojn, kiuj taŭgas en malvastaj spacoj. GaN helpas vian cirkvitan platon pritrakti pli da potenco kaj varmo. Tio signifas, ke robotoj daŭras pli longe kaj uzas malpli da energio. La suba tabelo montras kial GaN estas bona elekto por robotika cirkvitan platon-dezajno.
avantaĝon | Priskribo |
|---|---|
Alta elektrona movebleco | Vi ricevas rapidajn operaciojn kaj pli rapidajn ŝaltrapidojn. |
Larĝa bendbreĉo | Via cirkvitkarto povas pritrakti pli altajn tensiojn kaj resti fidinda. |
Bonega varmokondukteco | Viaj tabuloj pli bone regas varmon, do robotoj restas sekuraj. |
Miniaturigaj kapabloj | Vi fabrikas pli malgrandajn kaj pli malpezajn aparatojn por kompaktaj robotoj. |
Energia efikeco | Robotoj uzas malpli da energio kaj laboras pli longe antaŭ ol ŝargiĝi. |
Estontaj Tendencoj
Vi vidos novaj ŝanĝoj en humanoidaj dizajnado kaj fabrikado de robotaj cirkvitkartoj. IoT daŭre kreskos, do robotoj konektiĝos kun pli da aparatoj. GaN-aparatoj estos pli uzataj en robotiko, igante cirkvitkartojn pli malgrandaj kaj pli fortaj. Flekseblaj cirkvitoj helpos robotojn moviĝi laŭ novaj manieroj. Fabrikistoj uzos artefaritan inteligentecon por plibonigi kiel ili konstruas kaj testas robotojn. Novaj materialoj helpos cirkvitkartojn daŭri pli longe kaj funkcii pli bone. Vi devas atenti ĉi tiujn ŝanĝojn por resti antaŭe en robotiko kaj cirkvitkarto-fabrikado.
Konsilo: Daŭre lernu pri novaj teknologioj kaj materialoj por cirkvitaj cirkvitoj. Tio helpos vin konstrui pli bonajn humanoidajn robotojn kaj esti gvidanto en robotfabrikado.
Konfirmo en Humanoida Robota PCB
Kontrolo kontrolas ĉu via cirkvitkarto funkcias sekure en ĉiu roboto. Vi devas testi kaj aparataron kaj programaron. Ĉi tiu paŝo helpas vin trovi problemojn antaŭ ol uzi la roboton. Vi devas uzi fortikajn testojn kaj sekvi gravajn regulojn. Bona kontrolado malhelpas vian roboton panei kaj gardas homojn sekuraj.
Kontrolaj Celoj
Certigante Funkcian Integrecon
Vi volas, ke via cirkvitkarto funkciu ĝuste. Ĉiu parto devas plenumi sian taskon. Vi kontrolas ĉu signaloj moviĝas ĝuste kaj ĉu la potenco fluas bone. Vi serĉas malfermajn cirkvitojn aŭ kurtojn antaŭ ol konstrui la platon. Dezajnaj revizioj kaj regulkontroloj helpas vin trovi erarojn frue. Alta kvalito signifas, ke via roboto moviĝos kaj reagos laŭ via deziro.
Plenumo de Sekurecaj kaj Konformaj Normoj
Vi devas sekvi sekurecajn regulojn en robotiko. Ĉi tiuj reguloj gardas homojn kaj maŝinojn sekuraj. Multaj grupoj faras ĉi tiujn regulojn, kiel OSHA, ISO kaj ANSI. Vi devas kontroli ĉu via cirkvito plenumas ĉi tiujn regulojn antaŭ ol fari ĝin.
OSHA faras regulojn por malaltigi sanajn kaj sekurecajn riskojn ĉe la laborejo en Usono. OSHA ankaŭ volas, ke kompanioj trejnu kaj instruu laboristojn por teni laboron sekura kaj sana.
Jen kelkaj gravaj normoj por humanoida robotiko:
Normo/Regulo | Priskribo |
|---|---|
ISO 10218 | Fiksas regulojn por sekureco de industriaj robotoj. |
ISO 13849 | Fokusiĝas pri sekurecaj partoj de kontrolsistemoj. |
ANSI/RIA R15.06 | Certigas, ke la sekureco de kunlabora roboto estas la sama en Usono |
CSA Z434 | Kovras la sekurecon de kunlaboraj robotoj en Kanado. |
ISO 13482 | Estas por persona prizorgo kaj servorobotoj. |
Vi ankaŭ devas sekvi regulojn de grupoj kiel FAA, FCC, FDA, kaj privatecajn leĝoj.
Validigante Sensilon kaj AI-Integriĝon
Sensiloj kaj AI-moduloj helpas vian roboton sentu kaj pensu. Vi devas kontroli ĉu ĉi tiuj partoj funkcias kune. Vi testas ĉu sensiloj sendas la ĝustajn datumojn kaj ĉu artefaritaj inteligentecaj ĉipoj prilaboras ilin rapide. Vi certigas, ke via cirkvitkarto povas pritrakti multajn sensilojn kaj inteligentajn modulojn. Ĉi tiu paŝo tenas vian roboton inteligenta kaj sekura.
Konfirmaj Metodoj
Simulado kaj Modeligado
Vi uzas simulajn ilojn por testi vian cirkvitan cirkviton antaŭ ol konstrui ĝin. Ĉi tiuj iloj montras kiel signaloj moviĝas kaj kiel varmo disvastiĝas. Vi povas trovi problemojn frue kaj ripari ilin en via dezajno. Modelado helpas vin ŝpari tempon kaj monon.
Encirkvita Testado (ICT)
Encirkvita testado kontrolas ĉiun parton sur via cirkvitkarto. Vi uzas sondilojn por testi konektojn kaj serĉi kurtojn aŭ malfermajn cirkvitojn. Informadiko kaj Komunikado (IKT) helpas vin trovi problemojn, kiuj povus malhelpi la funkciadon de via roboto. Ĉi tiu metodo estas tre grava por kompleksaj, plurtavolaj dezajnoj.
Funkcia Atesto
Funkcia testado kontrolas ĉu via cirkvitkarto faras tion, kion vi volas. Vi funkciigas la platon kaj vidas ĉu ĝi regas motorojn, sensilojn kaj artefaritan inteligentecon. Vi serĉas erarojn en reala tempo. Ĉi tiu paŝo certigas, ke via roboto povas moviĝi, senti kaj reagi laŭplane.
Media kaj Stresa Testado
Vi testas vian cirkvitan cirkviton en malfacilaj kondiĉoj. Vi skuas ĝin, varmigas ĝin, kaj malvarmigas ĝin. Vi kontrolas ĉu ĝi funkcias post multaj fleksoj kaj tordoj. Media kaj streĉa testado helpas vin vidi ĉu via cirkvito daŭros en vera roboto. Vi volas, ke via plato postvivu vibradon, varmon kaj EMI-on.
Defioj en Konfirmo
Vi devas konservi altan kvaliton en via cirkvitkarto por ĝusta funkciado de roboto.
Vi bezonas malpliigi riskojn, precipe en sekurecaj laboroj.
Vi devas revizii vian dezajnon kaj kontroli ĉu estas malfermitaj cirkvitoj aŭ kurtcirkvitoj antaŭ ol fari ĝin.
Komplekseco de Plurtavolaj Dezajnoj
Plurtavolaj cirkvitoj malfaciligas kontroladon. Vi havas pli da konektoj kaj pli da lokoj por eraroj. Vi bezonas fortajn testojn por kontroli ĉiun tavolon. Kontroloj de dezajnaj reguloj helpas vin trovi kaŝitajn problemojn.
Validigo de Realtempa Datumtraktado
Humanoidaj robotoj bezonas rapidan datumtraktadon. Vi devas testi ĉu via cirkvitkarto povas pritrakti realtempajn signalojn de sensiloj kaj artefarita inteligenteco-blatoj. Vi serĉas prokrastojn aŭ erarojn, kiuj povus malrapidigi vian roboton.
Integriĝo de Flekseblaj kaj Rigidaj Cirkvitoj
Vi ofte uzas kaj flekseblajn kaj rigidajn cirkvitojn en humanoidaj robotoj. Vi devas kontroli ĉu ĉi tiuj partoj funkcias kune. Vi testas ĉu la konektoj restas fortaj post multaj kurbiĝoj. Ĉi tiu paŝo helpas vian cirkvitan cirkviton daŭri pli longe en movaj robotoj.
Plej Bonaj Praktikoj por Konfirmo
Plej Bona Praktiko | Priskribo |
|---|---|
Kolektante fortikajn fidindecajn datumojn | Necesa por estonta norma aranĝo preter malnovaj kutimoj. |
Efektivigante redundajn sekurecajn kontrolsistemojn | Bezonata por superregi altnivelan aŭtonomecon uzante fortajn sensilojn. |
Sekvante establitajn sekurecnormojn | Sekvu la regulojn ISO 13849 kaj ANSI/RIA por la sekureco de robotoj. |
Frua Konfirmo en la Dezajna Ciklo
Komencu kontroli frue. Vi kaptas erarojn antaŭ ol ili fariĝas grandaj. Fruaj kontroloj ŝparas tempon kaj monon.
Aŭtomatigitaj Testsistemoj
Uzu aŭtomatajn testsistemojn por kontroli vian cirkvitan cirkviton. Maŝinoj povas testi pli rapide kaj trovi pli da eraroj ol homoj. Aŭtomataj sistemoj helpas vin konservi altan kvaliton en ĉiu plato.
Kontinua Religo kaj Iteracio
Daŭre testu kaj plibonigu vian cirkvitan cirkviton. Uzu la retrosciigon de ĉiu testo por plibonigi vian dezajnon. Kontinuaj kontroloj helpas vin konstrui pli sekurajn kaj pli fortajn robotojn.
Konsilo: Humanoidaj robotaj cirkvitaj cirkvitoj bezonas pli da testado ol ĝenerala robotiko. Vi devas uzi en-cirkvitan testadon, funkcian testadon, kaj eĉ rentgenajn kontrolojn por certigi, ke ĉiu parto funkcias. Ĝeneralaj robotaj cirkvitaj cirkvitoj eble ne bezonas tiajn striktajn kontrolojn.
kontroli
Vi devas certigi, ke la PCB de via humanoida roboto funkcias laŭplane. Kontrolo signifas, ke vi kontrolas ĉiun parton kaj ĉiun paŝon. Vi volas, ke via roboto moviĝu, sentu kaj pensu sen eraroj. Se vi preterlasos ĉi tiun paŝon, via roboto povus panei aŭ eĉ fariĝi nesekura.
Konsileto: ĉiam testu vian PCB-on antaŭ ol vi uzas ĝin en roboto. Tio helpas vin trovi problemojn frue.
Vi povas uzi diversajn metodojn por kontroli vian PCB-on:
Inspekto vida: Rigardu la tabulon. Kontrolu ĉu mankas partoj aŭ estas difektitaj lutaĵoj.
Aŭtomatigita Testado: Uzu maŝinojn por testi cirkvitojn kaj konektojn. Maŝinoj trovas malgrandajn erarojn, kiujn vi eble preteratentas.
simulado: Provu vian dezajnon per komputilo. Vidu kiel signaloj moviĝas kaj kiel varmo disvastiĝas.
Funkcia Testado: Rulu la tabulon per motoroj kaj sensiloj. Observu ĉu ĉio funkcias kiel ĝi devus.
Ekologia Testado: Metu vian cirkvitan cirkviton en varmajn, malvarmajn aŭ ŝanceliĝantajn lokojn. Certigu, ke ĝi ankoraŭ funkcias.
Jen tabelo por helpi vin memori la ĉefajn konfirmpaŝojn:
Paŝo | Kion Vi Kontrolas |
|---|---|
Inspekto vida | Partoj, lutaĵo, kaj formo de la plato |
Aŭtomata Testado | Cirkvitoj, pantalonetoj, kaj malfermaj linioj |
simulado | Signala fluo kaj varmo |
Funkcia Atesto | Motoroj, sensiloj kaj AI-ĉipoj |
Media Testo | Varmo, malvarmo kaj vibrado |
Vi devus konservi registrojn de viaj testoj. Skribu tion, kion vi trovas. Se vi vidas problemon, riparu ĝin kaj testu denove. Bona konfirmo helpas vin konstrui sekurajn kaj inteligentajn robotojn. Vi povas fidi vian PCB-on kiam vi sekvas ĉi tiujn paŝojn.
Vi povas fari pli bonajn humanoidajn robotojn uzante bonajn paŝojn por la dezajno de cirkvitaj cirkvitoj. Dividu grandajn taskojn en pli malgrandajn taskojn por helpi kun la muntado. Pensu pri la bezonoj de homoj por igi konstruadon pli sekura. La suba tabelo listigas manierojn por daŭre plibonigi:
Strategio | Priskribo |
|---|---|
Hierarkia Tasko-Malkomponado | Dividas malfacilajn taskojn en facilajn paŝojn. |
Hom-Centrigita Dezajno | Metas homojn unue por pli sekura konstruado. |
Proaktiva Integra Dezajno | Uzas inteligentan paroladon por pli bona teamlaboro. |
Novaj materialoj, artefarita inteligenteco, kaj interreto de aferoj helpas fari pli fortajn cirkvitajn cirkvitojn (PCB) por humanoidaj robotoj. Daŭre lernu pri novaj robotaj teknologioj por certigi, ke via PCB funkcias bone kaj viaj robotoj estas pretaj por la sekvaj taskoj.
FAQ
Kio distingas humanoidajn robotajn PCB-ojn de ordinaraj PCB-oj?
Humanoidaj robotaj PCB-oj uzas flekseblajn cirkvitojn kaj specialajn materialojn. Ili ankaŭ havas multajn sensilojn. Ĉi tiuj trajtoj helpas robotojn moviĝi, fleksiĝi kaj pensi. Regulaj PCB-oj ne bezonas pritrakti tiom da movado. Ili ankaŭ ne plenumas tiom da malfacilaj taskoj.
Kiel oni testas humanoidan robotan PCB-on?
Vi rigardas la tabulon per viaj okuloj. Vi uzas maŝinojn por kontroli erarojn. Vi provas vian dezajnon per komputilo. Vi faras testojn per motoroj kaj sensiloj. Vi ankaŭ testas per varmo kaj skuado. Ĉi tiuj paŝoj helpas vin trovi problemojn frue.
Kial humanoidaj robotoj bezonas flekseblajn cirkvitojn?
Flekseblaj cirkvitoj taŭgas en brakojn, krurojn kaj artikojn. Vi povas fleksi kaj tordi ilin multfoje. Tio helpas vian roboton moviĝi kiel homo. Ĝi ankaŭ tenas la konektojn fortaj.
Kiuj materialoj plej bone funkcias por humanoidaj robotaj PCB-oj?
Vi devas uzi DuPont Pyralux TK kaj Panasonic FELIOS R-F775. Ĉi tiuj materialoj helpas vian PCB-on daŭri pli longe. Ili pritraktas varmon kaj subtenas rapidajn signalojn. Ili ankaŭ igas vian roboton pli sekura kaj pli fidinda.
Ĉu eblas facile ĝisdatigi sensilojn kaj AI-modulojn?
Jes! Vi povas aldoni novajn sensilojn aŭ artefaritan inteligentecon kiam ajn vi volas. Vi ne bezonas ŝanĝi la tutan cirkvitan cirkviton. Malfermaj dezajnoj kaj inteligentaj moduloj helpas vin ĝisdatigi kiam la teknologio pliboniĝas.
Konsilo: Ĉiam tenu vian PCB-dezajnon malfermita por ĝisdatigoj. Tio helpas vian roboton resti inteligenta kaj preta por novaj taskoj.